一种飞行拍摄的曝光补偿方法
文献发布时间:2023-06-19 09:24:30
技术领域
本发明属于探测器技术领域,涉及一种飞行拍摄的曝光补偿方法。
背景技术
近些年来,随着包括无人机在内的飞行技术的蓬勃发展,无论在国民经济领域还是在国防军事上其重要性日益突出;其中飞行拍摄或者航拍是其中重要的应用之一。不同温度的物体在红外波段有明显特征,温度越低,颜色越深。红外光学系统探测的的是目标的自身辐射,相比可见光光学系统,具有全天候观测、不受环境影响、穿透力强的优点。比如采用无人机红外与可见光同步遥感技术进行环境监察,可以有效地检查出河流两岸隐蔽在草丛中的正在排水的暗口。
但是一个迫切需要解决的问题在于,在飞行连续拍摄时,随飞行抖动翻滚可能形成S型排布的图片,因此需要拍摄视轴的稳定。用三维框架稳定是很多产品所采取的方案,三维稳定非常复杂,适用于大型高价值设备,如平台式惯导系统等,通常的摄像或拍照稳定系统难以承受。
发明内容
本发明解决的技术问题在于提供一种飞行拍摄的曝光补偿方法,通过反射+双通道成像的图像采集方式,在保持图像采集视轴稳定的情况下,还能够在曝光不足时进行像移补偿或视轴补偿。
本发明是通过以下技术方案来实现:
一种飞行拍摄的曝光补偿方法,包括以下操作:
1)在飞行载体的固定界面上搭载双通道成像机构,并在其前方设置可横滚/俯仰两维转动的反射镜;反射镜与水平方向具有一定的倾角,来自地面的光线经反射镜反射后,进入双通道成像机构中的可见光探测组件和红外探测组件成像;
2)所述的反射镜由反射镜驱动机构以双轴陀螺仪为参照,对其进行横滚/俯仰两维的驱动,使其视轴保持稳定;所述的双轴陀螺仪、反射镜分别设置在相平行的转轴上,且转轴之间以1/2的传动比相关联;
当飞行载体姿态变化时,双轴陀螺仪将探测到固定其的悬空框产生的角速度,此时反射镜也会存在相应的偏转;而与双轴陀螺仪相连接的测角传感器、方位传感器分别将检测的俯仰位置信号、方位位置信号发送给反射镜控制单元;反射镜控制单元以驱动反射镜反向偏转为导向,生成保持反射镜视轴稳定的驱动指令,并通过PWM驱动模块发送给驱动反射镜横滚/俯仰转动的横滚电机或俯仰电机;
反射镜控制单元以闭环反馈驱动的方式持续向横滚电机或俯仰电机发送指令,直到反射镜的视轴恢复;
3)在可见光探测组件和红外探测组件需要进行曝光补偿时,或在该时机到来前,反射镜控制单元通过PWM驱动模块向横滚电机或俯仰电机发出驱动指令,通过陀螺轴、反射镜轴带动反射镜向载体飞行的反方向旋转进行像移补偿或视轴补偿,将视轴驻留在场景或目标物上;
测角传感器、方位传感器将检测的信号反馈给反射镜控制单元;反射镜补偿控制单元根据角速度反馈信号调整驱动指令;
像移补偿或视轴补偿时间结束后,反射镜控制单元向横滚电机或俯仰电机发出驱动指令,带动反射镜向载体飞行的方向加速旋转,恢复到像移补偿或视轴补偿前的视轴位置。
反射镜驱动机构对反射镜的横滚/俯仰两维的驱动为:
所述的陀螺轴和反射镜轴设置在俯仰框架上,俯仰框架通过轴承嵌套在横滚框架上,陀螺轴、反射镜轴还以1/2的传动比通过转轮、钢带传动机构相连接,陀螺轴还通过传输带与俯仰电机的输出轴相连接;横滚框架上设有可驱动俯仰框架旋转的横滚电机;
当飞行载体姿态变化时,双轴陀螺仪将探测到悬空框产生的角速度,测角传感器、方位传感器分别将检测的俯仰位置信号、方位位置信号发送给反射镜控制单元;反射镜控制单元生成保持反射镜视轴稳定的驱动指令,并通过PWM驱动模块发送给俯仰电机、横滚电机;驱动反射镜轴反向偏转。
当飞行载体俯仰方向发生角度变化时,测角传感器向反射镜控制单元输出角度变化对应的俯仰信号,反射镜控制单元向驱动电机发出驱动指令,使陀螺轴相对飞行载体反向转动同样的角度,双轴陀螺仪相对于惯性空间不变;
当载体横滚方向发生角度变化时,方位传感器向反射镜控制单元输出角度变化对应的方位信号,反射镜控制单元向驱动电机发出驱动指令,使陀螺轴相对载体反向转动同样的角度,双轴陀螺仪相对于惯性空间不变。
所述反射镜控制单元对像移补偿的时序控制为:
飞行载体以一定的速度旋转,每隔n°拍摄一幅图像,拍摄时需要视轴在该位置驻留时间t,为红外探测组件提供必要的积分时间,拼接在一个圆周内所有拍摄图像获得全景图像;
反射镜相对物方空间进行步进运动,步进角为n°,步进周期为t
反射镜相对飞行载体逆向转动,速度为飞行载体的一半视轴在空间静止不动,这个过程持续t,探测视轴在0°静止的状态;
时间t后飞行载体开始反向针转动,一定时间后回到与反射镜的初始相对位置,或称为零位,即视轴从0°跳转到了n°;
反射镜继续旋转,飞行载体又顺向旋转,两者相抵,视轴就静止在n°处,保持时间t,飞行载体开始逆向旋转;一定时间后飞行载体回到零位,而反射镜则到达2n°;
如此过程,经过多个循环后,就可得到整个圆周的所有幅图像。
与现有技术相比,本发明具有以下有益的技术效果:
为了保持图像采集或拍摄的稳定性,本发明通过反射镜机构来实现视轴的惯性稳定,双通道成像装置固定不动,由反射镜旋转来实现拍摄轴的稳定,使得拍摄的系列图片呈直线排布而非S性排布,这样的方式比成像机构的平台式稳定占有更小的空间。而且将驱动电机的驱动轴与转轴之间的传动比设为1/2,当反射机构相对转动时,1/2传动机构带动反射镜转动一半的角度,根据反射镜几何光学原理,入射光不动,反射镜法线转动半度,出射光将转动一度,由此保证了视轴在惯性空间保持稳定的效果。
本发明将反射镜通过转轴架设在俯仰框架上,再将俯仰框架通过转轴设置在横滚框架上,使得该反射镜能够相对载体进行横滚/俯仰两维转动,使得反射镜能够解脱与飞行载体之间的耦合,然后再通过电机的驱动使得反射镜始终保持合理的倾角,从而将景物或目标物经反射光路传入探测器,使其输入光束与像面光束保持相对稳定,较好地克服了载体在空间和惯量方面的限制,保持探测器的视轴稳定;在热像或可见光需要进行曝光补偿时,或在该时机到来前,由控制单元控制驱动电机使反射镜进入补偿扫描运动状态,在反射镜达到平稳的补偿角速度期间(40ms),触发相机的曝光(20ms),在保持视轴稳定的情况下完成曝光补偿。
附图说明
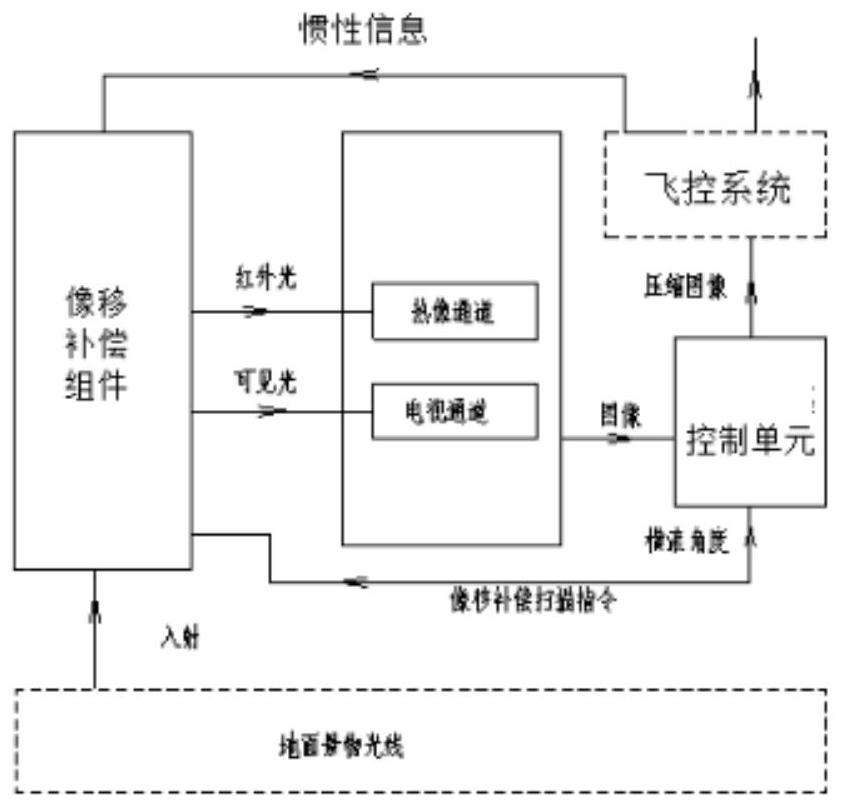
图1为本发明的流程示意图;
图2为本发明的反射镜与探测器设置示意图之一;
图3为本发明的反射镜与探测器设置示意图之二;
图4为本发明的反射镜保持视轴稳定的示意图;
图5为本发明的反射镜提供像移补偿的示意图;
图6为本发明的反射镜设置的示意之一;
图7为本发明的反射镜设置的示意之二;
图8为本发明的反射镜设置的示意之三;
图9为本发明的反射镜控制单元控制信号流示意图;
图10为本发明的反射镜进行像移补偿处于初始位置示意图;
图11为本发明的反射镜进行像移补偿处于3.6°初始位置示意图;
图12为本发明的反射镜进行像移补偿处于7.2°初始位置示意图;
图13为本发明的反射镜角速度随时间变化曲线;
图14为本发明的反射镜角度随时间变化曲线。
其中,1为俯仰框架,2为横滚框架,3为反射镜,4为钢带传动机构,5为测角传感器,6为陀螺组件,7为俯仰电机,8为方位传感器,9为横滚电机。
具体实施方式
下面结合实施例对本发明做进一步详细描述,所述是对本发明的解释而不是限定。
参见图1-图5,一种飞行拍摄的曝光补偿方法,包括以下操作:
1)在飞行载体的固定界面上搭载双通道成像机构,并在其前方设置可横滚/俯仰两维转动的反射镜;反射镜与水平方向具有一定的倾角,来自地面的光线经反射镜反射后,进入双通道成像机构中的可见光探测组件和红外探测组件成像;
2)所述的反射镜由反射镜驱动机构以双轴陀螺仪为参照,对其进行横滚/俯仰两维的驱动,使其视轴保持稳定;所述的双轴陀螺仪、反射镜分别设置在相平行的转轴上,且转轴之间以1/2的传动比相关联;
当飞行载体姿态变化时,双轴陀螺仪将探测到固定其的悬空框产生的角速度,此时反射镜也会存在相应的偏转;而与双轴陀螺仪相连接的测角传感器、方位传感器分别将检测的俯仰位置信号、方位位置信号发送给反射镜控制单元;反射镜控制单元以驱动反射镜反向偏转为导向,生成保持反射镜视轴稳定的驱动指令,并通过PWM驱动模块发送给驱动反射镜横滚/俯仰转动的横滚电机或俯仰电机;
反射镜控制单元以闭环反馈驱动的方式持续向横滚电机或俯仰电机发送指令,直到反射镜的视轴恢复;
3)在可见光探测组件和红外探测组件需要进行曝光补偿时,或在该时机到来前,反射镜控制单元通过PWM驱动模块向横滚电机或俯仰电机发出驱动指令,通过陀螺轴、反射镜轴带动反射镜向载体飞行的反方向旋转进行像移补偿或视轴补偿,将视轴驻留在场景或目标物上;
测角传感器、方位传感器将检测的信号反馈给反射镜控制单元;反射镜补偿控制单元根据角速度反馈信号调整驱动指令;
像移补偿或视轴补偿时间结束后,反射镜控制单元向横滚电机或俯仰电机发出驱动指令,带动反射镜向载体飞行的方向加速旋转,恢复到像移补偿或视轴补偿前的视轴位置。
反射镜驱动机构对反射镜的横滚/俯仰两维的驱动为:
所述的陀螺轴和反射镜轴设置在俯仰框架上,俯仰框架通过轴承嵌套在横滚框架上,陀螺轴、反射镜轴还以1/2的传动比通过转轮、钢带传动机构相连接,陀螺轴还通过传输带与俯仰电机的输出轴相连接;横滚框架上设有可驱动俯仰框架旋转的横滚电机;
当飞行载体姿态变化时,双轴陀螺仪将探测到悬空框产生的角速度,测角传感器、方位传感器分别将检测的俯仰位置信号、方位位置信号发送给反射镜控制单元;反射镜控制单元生成保持反射镜视轴稳定的驱动指令,并通过PWM驱动模块发送给俯仰电机、横滚电机;驱动反射镜轴反向偏转。
当飞行载体俯仰方向发生角度变化时,测角传感器向反射镜控制单元输出角度变化对应的俯仰信号,反射镜控制单元向驱动电机发出驱动指令,使陀螺轴相对飞行载体反向转动同样的角度,双轴陀螺仪相对于惯性空间不变;
当载体横滚方向发生角度变化时,方位传感器向反射镜控制单元输出角度变化对应的方位信号,反射镜控制单元向驱动电机发出驱动指令,使陀螺轴相对载体反向转动同样的角度,双轴陀螺仪相对于惯性空间不变。
所述反射镜控制单元对像移补偿的时序控制为:
飞行载体以一定的速度旋转,每隔n°拍摄一幅图像,拍摄时需要视轴在该位置驻留时间t,为红外探测组件提供必要的积分时间,拼接在一个圆周内所有拍摄图像获得全景图像;
反射镜相对物方空间进行步进运动,步进角为n°,步进周期为t
反射镜相对飞行载体逆向转动,速度为飞行载体的一半视轴在空间静止不动,这个过程持续t,探测视轴在0°静止的状态;
时间t后飞行载体开始反向针转动,一定时间后回到与反射镜的初始相对位置,或称为零位,即视轴从0°跳转到了n°;
反射镜继续旋转,飞行载体又顺向旋转,两者相抵,视轴就静止在n°处,保持时间t,飞行载体开始逆向旋转;一定时间后飞行载体回到零位,而反射镜则到达2n°;
如此过程,经过多个循环后,就可得到整个圆周的所有幅图像。
下面结合具体的实施例来说明。
参见图6-图8,给出了一种反射镜设置的方式,包括通过轴承嵌套在横滚框架2上的俯仰框架1,陀螺组件6和反射镜3分别设置在俯仰框架1的两个相平行的陀螺轴和反射镜轴上;陀螺组件6包括设在陀螺轴上悬空框内的双轴陀螺,所述反射镜3的镜面朝向采集图像的探测器;
在俯仰框架1的一侧陀螺轴、反射镜轴还以1/2的传动比通过转轮、钢带传动机构4相连接,陀螺轴还通过传输带与俯仰电机7的输出轴相连接;俯仰框架1的另一侧还设有与双轴陀螺相连接的测角传感器5;
所述的横滚框架2上设有可驱动俯仰框架1旋转的横滚电机9,以及与双轴陀螺相连接的方位传感器8;
测角传感器5、方位传感器8分别与反射镜控制单元的信号输入端相连接,反射镜控制单元的信号输出端经PWM驱动模块与俯仰电机7、横滚电机9相连接。
所述的悬空框位于俯仰框架1的的中心,当载体姿态变化时陀螺组件6将探测到悬空框产生的角速度,所述的测角传感器5、方位传感器8分别将检测的俯仰位置信号、方位位置信号发送给反射镜控制单元;反射镜控制单元生成保持反射镜视轴稳定的驱动指令,并通过PWM驱动模块发送给俯仰电机7、横滚电机9。
具体的,当载体俯仰方向发生角度变化时,测角传感器5向反射镜控制单元输出角度变化对应的俯仰信号,反射镜控制单元向驱动电机发出驱动指令,使陀螺轴相对载体反向转动同样的角度,陀螺组件6相对于惯性空间不变;
当载体横滚方向发生角度变化时,方位传感器8向反射镜控制单元输出角度变化对应的方位信号,反射镜控制单元向驱动电机发出驱动指令,使陀螺轴相对载体反向转动同样的角度,陀螺组件6相对于惯性空间不变。
当陀螺组轴相对于载体转动时,钢带传动机构4带动反射镜轴转动一半的角度,使反射镜3的视轴在惯性空间保持稳定的效果。
本发明是根据飞行载体姿态变化情况,通过控制反射镜轴相对载体进行横滚/俯仰两维反向转动,使采集图像的探测器的视轴能够解脱与飞行载体之间的耦合,这样光路中的反射镜就保持稳定(反射镜保持45°的倾角,景物或目标物的视轴始终铅垂向下),使其输入光束与像面光束保持相对稳定,较好地克服了载体在空间和惯量方面的限制;并能够隔离振动,保持视轴的稳定(铅垂向下),不发生晃动,使得拍摄的系列图片呈直线排布,而非S性排布。
反射镜可相对进行横滚和俯仰两维运动,俯仰范围-5°~+5°,横滚范围-40°~+40°:
当飞行器横滚时,反射镜将绕镜轴反向旋转,当横滚范围小于-30°~+30°时,可见光成像、热像光路几乎不受影响;
左滚40°时,热像光路入射能量下降5%,可见光不受影响;
右滚40°时,热像光路入射能量下降5%,可见光光路入射能量下降25%;
本发明采用反射镜机构来实现视轴的惯性稳定,比平台式稳定占有更小的空间,采集图像的可见光/热像传感器固定不动,可由60mm见方的反射镜旋转来实现拍摄轴在惯性空间的稳定。
参见图9,反射镜控制单元采集陀螺/传感器的信号,经模数转换和PID校正,驱动指令通过H型放大器模块输出PWM方波;通过向电机施加正反两个方向的PWM方波,靠占空比变化控制电机运行和停止,并使电机在任意停止位置上,有足够的抗扰动能力,及实现足够的刚度。
电气连接如下:
反射镜控制单元(DSP模块)与陀螺通过串口总线连接,DSP与陀螺的串口通信采用主从方式。DSP与陀螺通信的同时,利用另外一组串口与飞行在进行通信,接收系统的控制指令和伺服控制指令。DSP根据接收到的控制指令和陀螺信号进行伺服控制。
反射镜控制单元输出的PWM波形输出经过缓冲器芯片后将波形变为TTL电平的PWM波形,再将波形直接输入到功率驱动模块中,经过功率放大后驱动直流力矩电机。功率驱动模块直接由TTL电平的PWM波形驱动,防止功率电路对数字电路的干扰。
通过DSP的通用数字IO口,DSP模块接收伺服系统上电信号、俯仰轴的上下限位信号等,输出系统自检信号、串口通信状态信号等。
对于反射镜控制单元向俯仰电机或横滚电机发出驱动指令,带动反射镜进行的像移补偿或视轴补偿,下面将其简化为飞行载体为逆时针旋转、反射镜为顺时针旋转来说明。
飞行载体逆时针旋转,在一定速高比下,带动可见光和热像探测光轴相飞行器成像系统的视轴相对地面景物的扫描过程。
电机驱动反射镜做顺时针旋转,转动时长为40ms,在此期间,飞行器与反射镜转速比为2:1,使得光轴在空间中保持不动。在此40ms时间内,热像或可见光的光轴相对景物静止不动,可完成常时间的曝光拍摄(通常20ms)。
在此过程中,飞行载体一直匀速转动,当摄像机完成拍摄后,补偿反射镜迅速返回到起始位置,在按时间同步要求进行下一循环的反转补偿动作。
还是以顺时针、逆时针旋转来对像移补偿的时序控制进行说明:
飞行载体以36°/s速度匀速旋转,即10s扫描一周,探测器视场为5°,每隔3.6°拍摄一幅图像,拍摄时需要视轴在该位置驻留40ms,为热像仪提供必要的积分时间,因此热像仪在一个圆周内,可拍摄100幅图像,对其拼接,获得全景图像。
反射镜相对物方空间进行步进运动,步进角为3.6°,步进周期为100ms,在没一个步进角度视轴驻留时间为40ms,其余60ms为调整时间。
飞行载体逆时针转动,速度36°/s,反射镜顺时针转动,速度为18°/s,因反射镜的反射角的2倍关系,视轴转角速度可达到速度36°/s,使得视轴在空间静止不动,这个过程持续40ms,探测轴在0°静止的状态。
40ms后飞行载体开始逆时针转动,60ms后,当反射镜逆时针转动到3.6°时,飞行载体逆时针转过1.8°,视轴则转过3.6°,即回到与反射镜的初始相对位置,或称为零位,即视轴从0°跳转到了3.6°,如图10所示,视轴从位置1跳转到位置2,两位置夹角为3.6°。
100ms后,反射镜继续逆时针匀速旋转,飞行载体又开始顺时针扫描,两者相抵,视轴就静止在3.6°处,即位置2处,保持40ms,飞行载体开始逆时针转动,经60ms后,飞行载体回到零位,而反射镜则到达7.2°位置,即位置3处,如图12所示。
反射镜角速度随时间变化曲线则如图13所示,反射镜角度随时间变化曲线则如图14所示。
如此过程,经过100个循环后,就可得到整个圆周的100幅图像。
在热像或可见光需要进行曝光补偿时,或在该时机到来前,由控制单元控制驱动电机使反射镜进入补偿扫描运动状态,在反射镜达到平稳的补偿角速度期间(40ms),触发相机的曝光(20ms),在保持视轴稳定的情况下完成曝光补偿。
以上给出的实施例是实现本发明较优的例子,本发明不限于上述实施例。本领域的技术人员根据本发明技术方案的技术特征所做出的任何非本质的添加、替换,均属于本发明的保护范围。
- 一种飞行拍摄的曝光补偿方法
- 一种针对多镜头拍摄的曝光补偿调整方法