一种等边三角形液压自行走CT断层扫描安检机
文献发布时间:2023-06-19 09:26:02
技术领域
本发明涉及安检设备技术领域,特别涉及一种等边三角形液压自行走CT断层扫描安检机。
背景技术
目前,世界各国边检海关口岸货物吞吐量增涨迅猛,为各国的经济带来发展动力,同时面临的安全风险越来越高,货物中夹杂的违化品和违禁品类的走私物品越来越多,违禁品的检查通过人工去实现是一件不可能完成的任务。
近些年国内大型X光无损检测技术发展迅速,二维平面扫描己成为各国海关在边检口岸主要使用的设备,X光二维平面扫描结构复杂,辐射量大,对被扫描大型机械设备和货物需要用到专用的传输机托运匀速通过X光扫描探测架,使用起来需要有多名工作人员协助,安检扫描通过率低,由于机械设备等大宗货物内部结构复杂,二维平面扫描一次只生成了一个视角的内部X光结构图,如果有违化品和违禁品堆叠在机械零配件之间,从扫描生成的一个X光图像看不能清晰的观看内部的结构,造成隐患,小型多视角CT扫描安检机只有国外少数公司研发出了实际应用产品,超大型CT断层扫描技术在全球还是空白。
发明内容
本发明要解决的技术问题是提供一种等边三角形液压自行走CT断层扫描安检机,可以对大型机械设备货物进行二维平面扫描,也可以对大型机械设备货物进行断层扫描形成3D三维立体图,结构简单,使用方便,体积尺寸可根据需要定制,生产制作方便,安装使用维护费用低。
为了解决上述技术问题,本发明的技术方案为:
一种等边三角形液压自行走CT断层扫描安检机,其特征在于:包括等边三角形承力龙门架,所述等边三角形承力龙门架包括第一支撑杆、第二支撑杆和第三支撑杆,所述第一支撑杆和第二支撑杆间设有第一连接杆和第二连接杆,所述第三支撑杆的顶部设有第三连接杆,所述第二连接杆与第三连接杆间设有第一横杆、第二横杆和第三横杆;
所述第一支撑杆、第二支撑杆、第三支撑杆底部设有行走轮胎安装架,所述行走轮胎安装架上安装有液压自行走马达轮胎,所述行走轮胎安装架上设有用于控制液压自行走马达轮胎的方向伺服电动舵机;
所述等边三角形承力龙门架上设有机壳,所述机壳中设有用于驱动液压自行走马达轮胎运动的电动液压泵驱动总成和X光射线源,所述X光射线源与控制器连接,所述控制器与锂电池组连接,所述锂电池组设置在长方体锂电池组箱中,所述长方体锂电池组箱在第一连接杆的底部,所述第二横杆上设有L形X光探测架,所述L形X光探测架与控制器连接。
优选的,所述第一支撑杆、第二支撑杆、第三支撑杆上设有距离传感器。
优选的,所述第一横杆、第三横杆上设有照明灯。
优选的,所述第一支撑杆与第三支撑杆间的距离等于第二支撑杆与第三支撑杆间的距离。
优选的,所述长方体锂电池组箱的对称中心与第一连接杆的对称中心在同一竖直线上。
优选的,所述第一连接杆和第二连接杆间设有第一固定杆。
采用上述技术方案,由于设有等边三角形承力龙门架,使得安检机可以对大型设备货物进行安检,由于设有液压自行走马达轮胎和方向伺服电动舵机,使得安检机可以围绕大型设备货物进行360度旋转,完成大型设备货物的进行断层扫描形成3D三维立体图,由于设有X光射线源和L形X光探测架,使得安检机可以对货物进行安检,该可以对大型机械设备货物进行二维平面扫描,也可以对大型机械设备货物进行断层扫描形成3D三维立体图,结构简单,使用方便,体积尺寸可根据使用场合进行定制,制作方便,安装使用维护费用低。
附图说明
图1为本发明一种等边三角形液压自行走CT断层扫描安检机的主视结构示意图;
图2为本发明一种等边三角形液压自行走CT断层扫描安检机的俯视结构示意图;
图3为本发明一种等边三角形液压自行走CT断层扫描安检机的左视结构示意图;
图4为本发明一种等边三角形液压自行走CT断层扫描安检机的右视结构示意图。
具体实施方式
下面结合附图对本发明的具体实施方式作进一步说明。在此需要说明的是,对于这些实施方式的说明用于帮助理解本发明,但并不构成对本发明的限定。此外,下面所描述的本发明各个实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互组合。
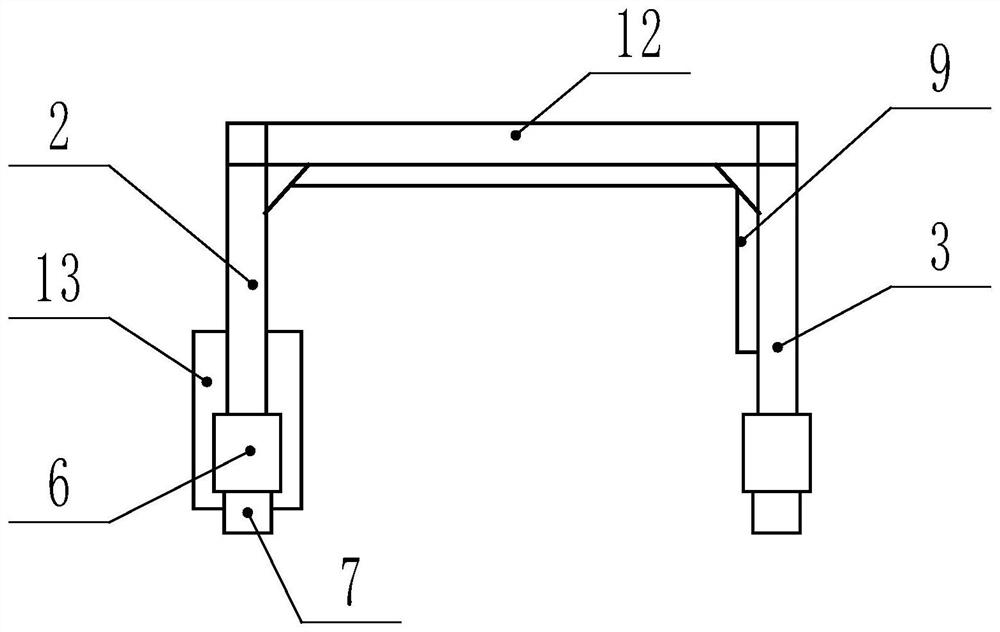
如图1-图4所示,图1为本发明一种等边三角形液压自行走CT断层扫描安检机的主视结构示意图,图2为本发明一种等边三角形液压自行走CT断层扫描安检机的俯视结构示意图,,图3为本发明一种等边三角形液压自行走CT断层扫描安检机的左视结构示意图,图4为本发明一种等边三角形液压自行走CT断层扫描安检机的右视结构示意图,等边三角形液压自行走CT断层扫描安检机包括等边三角形承力龙门架,等边三角形承力龙门架包括第一支撑杆1、第二支撑杆2和第三支撑杆3,第一支撑杆1、第二支撑杆2、第三支撑杆3处于直立状态,用于支撑整个装置,第一支撑杆1和第二支撑杆2间设有第一连接杆4和第二连接杆5,第一连接杆4和第二连接杆5平行设置在第一支撑杆1和第二支撑杆2之间,与第一支撑杆1、第二支撑杆2垂直,第三支撑杆3的顶部设有第三连接杆14,第二连接杆5与第三连接杆14间设有第一横杆10、第二横杆11和第三横杆12,通过第一横杆10、第二横杆11、第三横杆12的连接构成了稳定的承力龙门架;
第一支撑杆1、第二支撑杆2、第三支撑杆3底部设有行走轮胎安装架6,行走轮胎安装架6上安装有液压自行走马达轮胎7,行走轮胎安装架6上设有用于控制液压自行走马达轮胎7的方向伺服电动舵机8,操作时,通过远程控制方向伺服电动舵机8来控制整个安检机的运动,实现大型设备货物的二维扫描、三位断层扫描,本发明的技术革新了螺旋CT扫描机架结构复杂,磨损比较快,寿命短维护成本高,体积重量受限的问题,本发明釆用等边三角形液压自行走马达装置,等边三角形内可以形成X光安检通道对大型机械设备货物进行二维平面扫描,同时还可以通过等边三角形支点的液压自行走马达偏转45度,围绕着大型机械设备货物旋转一周360度X光安检扫描,L形探测架相邻两个物理像素捕捉的X光射线能量差,多个截面物理像素捕捉的X光射线能量经计算机图像处理后形成断层扫描面,大型机械设备货物的X光3D三维立体图由多个断层扫描截面合成,安检操作员可以通过显示屏360 度查看大型机械设备货物内部结构细节,从而判定危化品和违禁品的具体躲藏位置,提高了安检效率,降低了人力成本;
等边三角形承力龙门架上设有机壳,机壳中设有用于驱动液压自行走马达轮胎7运动的电动液压泵驱动总成和X光射线源,X光射线源与控制器连接,控制器与锂电池组连接,锂电池组设置在长方体锂电池组箱13中,长方体锂电池组箱13在第一连接杆4的底部,第二横杆11上设有L形X光探测架9,L形X光探测架9与控制器连接,使用时,安检人员在远端控制室操作方向盘控制方向伺服电动舵机8来控制安检机行走,控制等边三角形承力龙门架行走到大型机械设备货物上方,三台方向伺服电动舵机8偏转45度,三台液压自行走马达轮胎7通过电动液压泵驱动总成提供动力,围绕大型机械设备货物中心点匀速自行走转动一圈,完成一周360度扫描,釆集的图像数据经过5G WlFl无线通迅天线传输给图像计算机完成 X光图像3D三维立体重建,也可以将大型机械设备货物送至安检机等边三角形承力龙门架下,再控制安检机等边三角形承力龙门架旋转360度对大型机械设备货物进行360度扫描,对于集装箱进行扫描时,通过控制安检机通过集装箱进行扫描,方便快捷,由于操作人员是远程控制安检机进行作业,能够保证操作人员的人身安全,避免受到X光辐射;
第一支撑杆1、第二支撑杆2、第三支撑杆3上设有距离传感器,距离传感器用于保证大型机械设备货物与安检机之间的距离,避免操作过程中大型机械设备货物与安检机之间造成接触而出现事故;第一横杆10、第三横杆12上设有照明灯,照明灯用于行走时的照明;第一支撑杆1与第三支撑杆3间的距离等于第二支撑杆2与第三支撑杆3间的距离,第一支撑杆1、第二支撑杆2、第三支撑杆3的位置之间形成等腰三角形,保证整个等边三角形承力龙门架的结构稳定;长方体锂电池组箱13的对称中心与第一连接杆4的对称中心在同一竖直线上,长方体锂电池组箱13焊接在第一连接杆4上,两者的中心线位于同一竖直线上,能够更好的保持整个等边三角形承力龙门架结构的稳定;第一连接杆4和第二连接杆5间设有第一固定杆,第一固定杆使得第一连接杆4和第二连接杆5连接更加稳固。
以上结合附图对本发明的实施方式作了详细说明,但本发明不限于所描述的实施方式,对于本领域的技术人员而言,在不脱离本发明原理和精神的情况下,对这些实施方式进行多种变化、修改、替换和变型,仍落入本发明的保护范围内。