一种基于飞机控制响应的位置导航信号防欺骗方法
文献发布时间:2023-06-19 09:29:07
技术领域
本发明属于飞机控制响应领域,具体为一种基于飞机控制响应的位置导航信号防欺骗方法。
背景技术
无人机导航定位对GPS依赖程度高,一旦无人机被导航欺骗,后果不堪设想。现役反控制策略主要依赖于利用天线进行抗宽带压制式干扰功能,而对于欺骗式干扰,存在技术成熟度较低、应用场景复杂等技术难点,往往难以实施。提出了一种基于飞机控制响应的位置导航信号防欺骗策略。
发明内容
针对目前无人机存在的反欺骗控制问题,提出了一种基于飞机控制响应的位置导航信号防欺骗策略,填补了国内该技术问题的空白。
本发明技术方案:
一种基于飞机控制响应的位置导航信号防欺骗方法,首先,设置惯导转入纯惯模式,记录下当前位置,让飞机转入人工模式飞行,给飞机一个固定的滚转坡度,根据飞机当前位置,并根据固定坡度计算出飞机运动至当前绕圆最远处距离时的位置,与GPS的定位状态作对比,大于位置门限则判断飞机被欺骗。
当发现飞机受到干扰时,在地面站强制选择惯导进入纯惯模式。
上一步中发现干扰时,飞机应立即转为人工飞行模式。
所述的纯惯模式在10分钟内可保持高精度的导航定位,
所述固定的滚转坡度为10°。
所述的受到干扰包括定位位置异常跳变、飞机定位位置不在常规飞行区域范围内、GPS定位数据与惯导组合导航定位数据差距大。
所述的大于位置门限具体为2Km。
当判断出飞机受到欺骗时,终止任务的进行。
本发明技术效果:
本发明方法克服了现有技术成熟度较低、应用场景复杂等技术难点,对无人机导航防欺骗手段运用于航空领域起到了极大的推动作用,引领了无人侦察机的技术发展,并产生巨大的经济效益,推动了社会、军事技术的发展,具有极高的推广应用价值。
附图说明
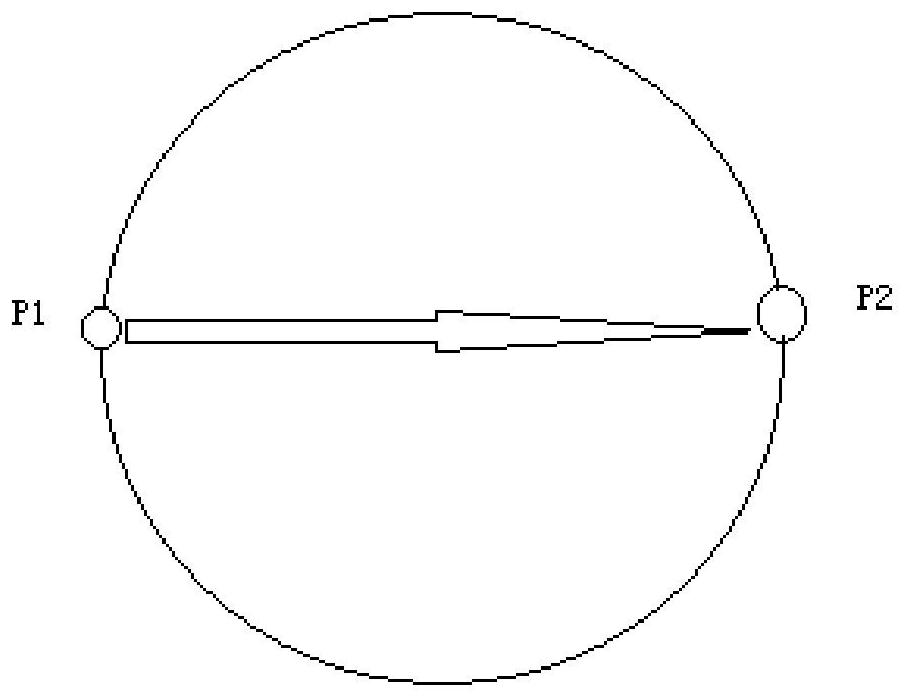
图1为飞机运动状态位置关系图;
其中P1为当前位置;P2当前绕圆最远处距离时的位置。
具体实施方式
下面结合附图对本方法做进一步的说明,其中未详尽部分为常规技术。
本发明技术解决方案的基本思路是,给飞机一个固定的滚转坡度,记录下飞机当前纯惯模式下的位置,根据飞机当前位置,并根据坡度计算出飞机运动至离当前位置最远处距离时的位置,与GPS的定位状态作对比,大于相应门限则判断飞机被欺骗。
具体实施时,本发明基于飞机控制响应的位置导航信号防欺骗方法过程如下:
首先,设置惯导转入纯惯模式,记录下当前位置,让飞机转入人工模式飞行,给飞机一个固定的滚转坡度,根据飞机当前位置,并根据固定坡度计算出飞机运动至当前绕圆最远处距离时的位置,与GPS的定位状态作对比,大于位置门限则判断飞机被欺骗,如图1所示。
当飞行员发现飞机可能受到干扰时,在地面站人工强制选择惯导进入纯惯模式。
上一步中发现干扰时,飞机应立即转为人工飞行模式,防止飞机被进一步的欺骗。
所述的纯惯模式在短时间(10分钟)内可以保持较高精度的导航定位。
所述固定的滚转坡度为10°,这样的角度在飞机滚转能力范围以内,可以保持稳定和安全的飞行,防止飞机继续被欺骗。
所述的受到干扰包括定位位置异常跳变、飞机定位位置不在常规飞行区域范围内、GPS定位数据与惯导组合导航定位数据差距大。
所述的大于位置门限为2Km。该设定考虑到纯惯模式的定位误差、计算误差,考虑到飞机的安全位置而设定的门限。
当判断出飞机受到欺骗时,终止任务的进行,飞行员在地面站按压任务终止的开关使得飞机尽快脱离任务区域回到本场。
- 一种基于飞机控制响应的位置导航信号防欺骗方法
- 一种基于钟差拟合的导航欺骗信号产生方法