一种基于密度峰值自适应聚类的森林火灾监测系统
文献发布时间:2023-06-19 09:32:16
技术领域
本发明涉及一种火灾监测系统,更具体的说是涉及一种基于密度峰值自适应聚类的森林火灾监测系统。
背景技术
森林火灾预防的重点是对森林火灾进行监测预警,目前来说,森林火灾预防分为人工检查,包括:采用固定位置的烟火传感器、摄像头进行监测;使用各式民用飞行器巡检火点;采用人工巡山检查,成本低廉,是目前使用较多的一种森林火灾预防方式,但是效率低下。由于森林面积大、幅员广阔,距离城市遥远,且通过人眼识别的能力有限,对早期尚未形成火苗的火灾无法识别,不能做到快速识别早期火灾。要想有效的对大面积的森林、山地等地形进行监测,则需要安装固定位置的烟火传感器,烟火传感器有较强的火焰预警能力。不过森林、山地等地形的不稳定因素会限制烟火传感器的安装,较难选择合适的地点安装烟火传感器,因而会出现观测死角的情况。要使烟火传感器发挥作用还需要数量庞大的传感器支撑,烟火传感器的维修费用也是一笔不小的开支,这样一来便大大的增加了林场防火的成本。要想有效且及时的发现森林火灾,各式民用飞行器就派上用场了,民用飞行器能有效及时的发现森林火灾,而且不存在观测死角的情况,但民用飞行器的租赁费用不低,导致防火成本增高,覆盖物的火灾高危点也会影响巡测检查的效果。
因而有专利号为2020103424646,专利名称为一种适用于林场火险监测的系统及方法,其通过设置无人机控制系统和无人机来拍摄森林图像,然后再通过数据处理与通信系统对无人机拍摄过来的森林图像进行处理,利用深度学习图像处理算法,对目标图片进行检测训练,构建无人机林场火险监测模型,通过检测模型来反应出当前的火灾情况,然而森林情况复杂,对比文件1中又是通过颜色识别的方式来判断当前的森林是否发生火灾,如此一方面计算量十分的庞大,增加设备成本也增加了计算时间,另一方面其所采集到的图像干扰元素过多,会大大降低计算精度。
发明内容
针对现有技术存在的不足,本发明的目的在于提供一种计算量少,且计算精度高的基于密度峰值自适应聚类的森林火灾监测系统。
为实现上述目的,本发明提供了如下技术方案:一种基于密度峰值自适应聚类的森林火灾监测系统,包括:
拍摄无人机,其内具有红外测温器和温度阈值,用于飞行到森林上空,拍摄监测森林温度情况,以输出拍摄图像,同时在拍摄图像上标出超过温度阈值的地点;
无人机控制系统,与拍摄无人机通信连接,以控制拍摄无人机在森林上的飞行轨迹;
数据处理系统,耦接于拍摄无人机,以接收拍摄无人机输出的拍摄图像,并通过密度峰值聚类算法对拍摄图像内的地点进行聚类,获得聚类结果;
火警预测系统,与数据处理系统耦接,以接收数据处理系统输出的聚类结果,并对聚类结果进行分析计算,以输出火警预测结果。
作为本发明的进一步改进,所述数据处理系统通过密度峰值聚类算法对拍摄图像内的地点进行聚类的具体步骤如下:
步骤一,将无人机控制系统内的拍摄无人机的飞行轨迹均匀的分为若干段,以其中一段的距离长度作为截断距离计算拍摄图像内各个地点的局部密度;
步骤二,选取聚类中心地点,然后将其余地点归类到比它密度更大的最相近的类中心所属的类别中,完成聚类算法,输出聚类结果。
作为本发明的进一步改进,所述步骤一中的截断距离通过以下步骤计算得出:
步骤一一,在接收到标有地点的拍摄图像以后,将拍摄无人机的飞行轨迹整合到拍摄图像内,同时将拍摄图像内的各个点延伸至飞行轨迹上,在飞行轨迹上构成一个个截断点
步骤一二,计算步骤一一中各个截断点之间的距离,获得截断线段集,计算截断线段集内截断线段长度的中位数,该中位数作为截断距离。
作为本发明的进一步改进,所述火警预测系统对聚类结果进行分析计算的具体步骤如下:
步骤三,在接收到聚类结果,将各个簇进行画圈,计算聚类结果各个簇内部的地点的数量;
步骤四,选择地点数量较多的簇作为火灾预发圈,发出信号至无人机控制系统,无人机控制系统控制拍摄无人机移动到火灾预发圈的位置,并下降高度拍摄火灾预发圈的具体图像;
步骤五,通过图像识别算法分析步骤四中获得的具体图像中是否具有火苗图像,若有火苗图像则输出火灾预警信号,若没有火苗图像则输出火灾关注信号,同时派出火灾探测机器人移动至火灾预发圈内进行探测。
作为本发明的进一步改进,所述步骤五中图像识别算法识别火苗图像的具体步骤如下:
步骤五一,遍历具体图像内的各个颜色,画出颜色边界;
步骤五二,识别出步骤五一中红色的颜色边界,放大该颜色边界内部图像,同时分析颜色边界内部图像像素;
步骤五三,将步骤五二中获得的图像像素值与现有网上的火焰像素值相比对,若比对结果相似则判断为火苗图像,若比对结果不同,则判断为非火苗图像。
本发明的有益效果,通过拍摄无人机的设置,便可有效的飞到森林的上空,拍摄森林的俯视图像了,并且其拍摄的图像仅是作为背景使用,通过其内的红外测温器和温度阈值,可将超过温度阈值的地点标注在背景图像上,然后通过数据处理系统和火警预测系统的设置,便可对超过温度阈值的地点进行聚类分析,因此相比于现有技术中采用图像分析的方式,仅需要对地点进行聚类分析即可,计算量低,减少了设备成本也节省了计算时间,且也避免了因为图像上干扰元素的影响导致计算精度降低的问题。
附图说明
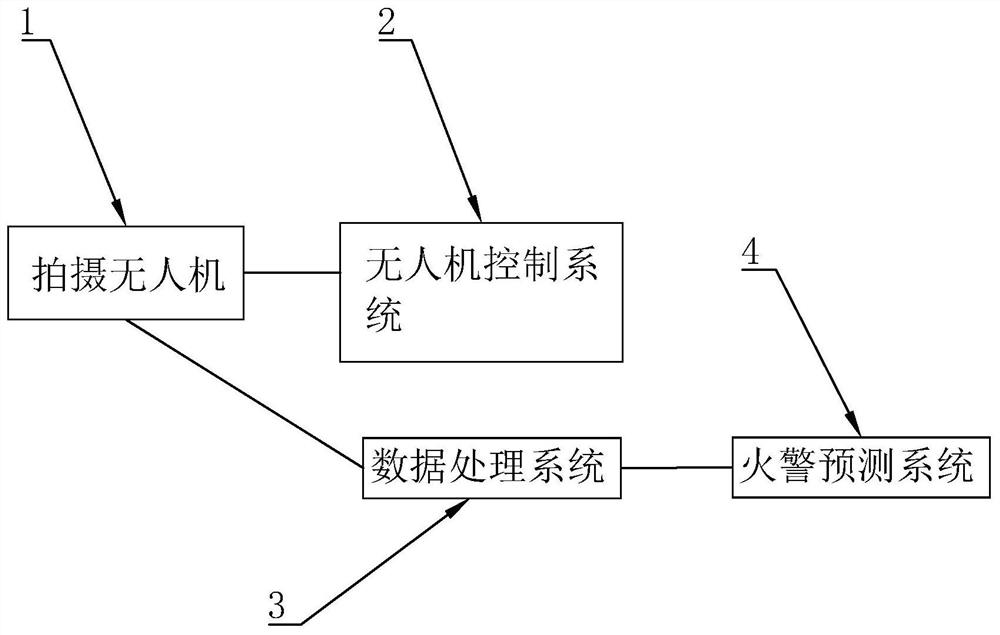
图1为本发明的基于密度峰值自适应聚类的森林火灾监测系统的模块框图。
具体实施方式
下面将结合附图所给出的实施例对本发明做进一步的详述。
参照图1所示,本实施例的一种基于密度峰值自适应聚类的森林火灾监测系统,其特征在于:包括:
拍摄无人机1,其内具有红外测温器和温度阈值,用于飞行到森林上空,拍摄监测森林温度情况,以输出拍摄图像,同时在拍摄图像上标出超过温度阈值的地点;
无人机控制系统2,与拍摄无人机1通信连接,以控制拍摄无人机1在森林上的飞行轨迹;
数据处理系统3,耦接于拍摄无人机1,以接收拍摄无人机1输出的拍摄图像,并通过密度峰值聚类算法对拍摄图像内的地点进行聚类,获得聚类结果;
火警预测系统4,与数据处理系统3耦接,以接收数据处理系统3输出的聚类结果,并对聚类结果进行分析计算,以输出火警预测结果,在使用本实施例的监测系统的过程中,首先通过无人机控制系统2控制拍摄无人机1飞行到待检测的森林上空拍摄图像,并且输出标有地点的图像,然后再传输到数据处理系统3内,通过数据处理系统3内的密度峰值聚类算法进行聚类,如此便可得到地点密度大的簇,如此便表示该区域高温地点多,因此很可能会出现火灾的情况,因为当发生火灾时会导致一片区域的温度提升,这样通过上述聚类的作用,便可能够简单有效实现分析出拍摄图像中可能发生火灾的点,相比于现有技术中采用图像分析的方式,计算量更低,相应的计算精度也就更高。
作为改进的一种具体实施方式,所述数据处理系统3通过密度峰值聚类算法对拍摄图像内的地点进行聚类的具体步骤如下:
步骤一,将无人机控制系统2内的拍摄无人机1的飞行轨迹均匀的分为若干段,以其中一段的距离长度作为截断距离计算拍摄图像内各个地点的局部密度;
步骤二,选取聚类中心地点,然后将其余地点归类到比它密度更大的最相近的类中心所属的类别中,完成聚类算法,输出聚类结果,通过上述两个步骤的设置,便可有效的利用密度峰值聚类算法进行聚类了,且采用了飞行轨迹的内截取截断距离的方式,使得截断距离的选择能够更好的符合实际情况,也能够使得聚类结果更加精确。
作为改进的一种具体实施方式,所述步骤一中的截断距离通过以下步骤计算得出:
步骤一一,在接收到标有地点的拍摄图像以后,将拍摄无人机1的飞行轨迹整合到拍摄图像内,同时将拍摄图像内的各个点延伸至飞行轨迹上,在飞行轨迹上构成一个个截断点
步骤一二,计算步骤一一中各个截断点之间的距离,获得截断线段集,计算截断线段集内截断线段长度的中位数,该中位数作为截断距离,通过上述步骤的设置,便可有效的实现计算出截断距离,且计算过程简单方便,计算量少。
作为改进的一种具体实施方式,所述火警预测系统4对聚类结果进行分析计算的具体步骤如下:
步骤三,在接收到聚类结果,将各个簇进行画圈,计算聚类结果各个簇内部的地点的数量;
步骤四,选择地点数量较多的簇作为火灾预发圈,发出信号至无人机控制系统2,无人机控制系统2控制拍摄无人机1移动到火灾预发圈的位置,并下降高度拍摄火灾预发圈的具体图像;
步骤五,通过图像识别算法分析步骤四中获得的具体图像中是否具有火苗图像,若有火苗图像则输出火灾预警信号,若没有火苗图像则输出火灾关注信号,同时派出火灾探测机器人移动至火灾预发圈内进行探测,通过上述步骤的设置,便可有效的实现便可先选择出火灾预发圈,然后再通过拍摄无人机1进一步确定,再拍摄无人机1无法直接确定的时候,便可通过火灾探测机器人移动到火灾预发圈进行准确测定,如此便可避免火灾探测的遗漏,且也不会增加过多的工作量。作为改进的一种具体实施方式,所述步骤五中图像识别算法识别火苗图像的具体步骤如下:
步骤五一,遍历具体图像内的各个颜色,画出颜色边界;
步骤五二,识别出步骤五一中红色的颜色边界,放大该颜色边界内部图像,同时分析颜色边界内部图像像素;
步骤五三,将步骤五二中获得的图像像素值与现有网上的火焰像素值相比对,若比对结果相似则判断为火苗图像,若比对结果不同,则判断为非火苗图像,通过上述步骤的设置,便可有效的通过图像识别算法识别出火苗图像了,进而通过拍摄无人机1的拍摄作用实现对于火灾发生与否的检测。
综上所述,本实施例的监测系统,通过拍摄无人机1、无人机控制系统2、数据处理系统3和火警预测系统4的设置,便可通过拍摄无人机1拍摄带有地点标识拍摄图像,然后再通过数据处理系统3的密度峰值聚类算法的使用,便可有效的实现对于森林火灾的监测了。
以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 一种基于密度峰值自适应聚类的森林火灾监测系统
- 一种基于密度峰值聚类的网络异常流量监测系统