一种计算变频电机驱动车体走行位置的方法
文献发布时间:2023-06-19 09:36:59
技术领域
本发明涉及自动控制技术领域,具体为一种计算变频电机驱动车体走行位置的方法。
背景技术
位置检测是最常用的检测手段之一,常用的检测仪器仪表有:激光测距仪、微波测距仪、超声波测距仪、磁致伸缩位移传感器、压变位移传感器、编码器等。
一般工况下,选用常用的检测仪器仪表可以得到准确的检测结果,和设备选型有关,检测精度可以到微米级,满足自动控制要求。
在高温粉尘、物流路径繁杂、干扰因素多的工控下(以下简称特殊工控),常用的检测仪器仪表输出的位置检测值易受到干扰,设备本体易损坏。一旦位置检测值出现异常,自动控制过程被迫终止,严重影响到自动控制过程的稳定性,导致自动控制指标被迫下调,甚至导致无法实施自动控制。
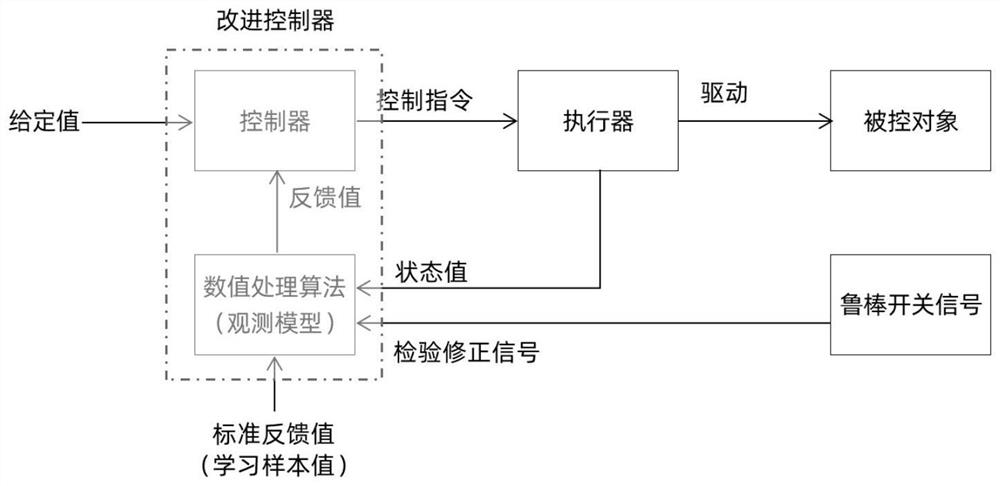
闭环控制(自动控制)一个目标对象的移动位置,如图1所示,涉及控制器、执行器、被控对象、检测传感器等;
特殊工况下,位置检测传感器易故障、检测值易被干扰、甚至无法安装布置。
发明内容
本发明的目的在于提供一种计算变频电机驱动车体走行位置的方法,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:一种计算变频电机驱动车体走行位置的方法,包括如下步骤:
S1,时效图构建:
P
P=P
ta表示时效图构建周期,T表示与时效图对应的固定时间段;
假设T=1s、t
P=T/t
t时刻,根据电压s
X
其中a和b是两个在[0,1]区间系数,且a+b=1,在样本学习阶段优化调整a和b的取值;
同时采集标准反馈值f
S2,样本学习:
采用机器学习方法中的深度卷积神经网络算法,通过学习,得到数值处理算法M,数值处理算法M用于识别时效图计算得出位置移动值f;
f=M·(X,Y,C)
采用历史数据,状态值S和标准反馈值F做为学习样本,优化调整学习算法系数,当计算值f与标准反馈值之间的误差百分比小于设定目标,样本学习完成;
S3,判别修正:
采用鲁棒开关信号作为检验修正信号,比较已知的准确值fn与f值,偏差百分比小于预设定允许范围时,采用系数d修正计算结果;
d=fn/f
偏差百分比大于预设定打滑值时,判断出现车轮打滑现象;
偏差百分比大于预设定异常值时,判断系统异常,计算结果失效;
S4,实时计算:
控制器使用状态值S,实时计算位置移动值,并将该值用于自动控制。
与现有技术相比,本发明的有益效果是:
1、本发明,运用人工智能机器深度学习方法,用数值算法计算变频电机驱动车体走行位置,降低设备投入及维护成本;
2、本发明,计算位置值f可以达到一定的精度,使用修正信号确保计算精度的稳定性和异常报警;
3、本发明,可以判断是否出现打滑或者系统异常;
4、本发明,运用于特殊工况时,解决不能采用物理传感器的问题,使自动控制得以实施;
5、本发明,和位置传感器同时使用时,通过与时效图计算结果叠加,可以修正异常干扰造成的信号波动,大大优于一般的滤波算法,大幅提高控制系统的鲁棒性。
附图说明
图1为本发明的现有技术的闭环控制结构示意图;
图2为本发明的结构示意图;
图3为本发明的状态趋势图;
图4为本发明的时效图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图2-3,本发明提供一种技术方案:一种计算变频电机驱动车体走行位置的方法,包括如下步骤:
变频电机驱动车体走行过程中,执行器的状态值在不断变化,见图3,本发明使用执行器状态值中的电压s1、电流s2、频率s3等三个值(三个值均为各自设计最大值的归一化值),组成状态值S;
车体的走行位置r1和走行速度r2与状态值S之间存在一种内在关联,本发明将减速机速比当做内在关联关系的一部分,简要表达为:
由于变频驱动用的是交流电源,状态值必然处于波动状态,R(r1,r2)与S之间的关系是非线性的。这种非线性关系导致普通的计算方法得到计算结果与实际值之间的误差过大,且误差变动幅度大,即便运用概率统计方法也难以对S进行估计。
基于内在关联关系客观存在,引入人工智能、大数据分析和机器学习思想,本发明提出一种新的计算变频电机驱动车体走行位置的方法,具体分成时效图构建、样本学习、判别修正、实时计算等四步;
如图4所示,S1,时效图构建:
P
P=P
ta表示时效图构建周期,T表示与时效图对应的固定时间段;
假设T=1s、t
P=T/t
t时刻,根据电压s
X
其中a和b是两个在[0,1]区间系数,且a+b=1,在样本学习阶段优化调整a和b的取值;
同时采集标准反馈值f
S2,样本学习:
采用机器学习方法中的深度卷积神经网络算法,通过学习,得到数值处理算法M,数值处理算法M用于识别时效图计算得出位置移动值f;
f=M·(X,Y,C)
采用历史数据,状态值S和标准反馈值F做为学习样本,优化调整学习算法系数,当计算值f与标准反馈值之间的误差百分比小于设定目标,样本学习完成;
S3,判别修正:
采用鲁棒开关信号作为检验修正信号,比较已知的准确值fn与f值,偏差百分比小于预设定允许范围时,采用系数d修正计算结果;
d=fn/f
偏差百分比大于预设定打滑值时,判断出现车轮打滑现象;
偏差百分比大于预设定异常值时,判断系统异常,计算结果失效;
S4,实时计算:
控制器使用状态值S,实时计算位置移动值,并将该值用于自动控制。
采用人工智能机器学习方法,利用执行器的状态信息(电压、电流、频率等),以鲁棒性极强的外部开关信号(例如:限位开关、接近开关、光电开关等)做为辅助修正信号。学习阶段,改进控制器将状态值、修正信号、标准反馈值与移动过程中的时间变量相结合,生成时效作用图(以下简称时效图,时效图是代表状态值与位移和时间相呼应的内在关联的一种可视化表达),一张张实时变化的时效图类似于一张张可视化位移动作图,实时计算时效图得出其中的位移变化信息,类似于实时识别心电图中的心跳数。计算位移量的同时,可以实时判断设备是否异常故障停止或者移动中是否出现打滑。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种计算变频电机驱动车体走行位置的方法
- 一种铁道客车车体滚摆频率和摆心位置计算方法