一种多功能眼科全自动测量方法及系统
文献发布时间:2023-06-19 09:38:30
技术领域
本发明涉及光电子技术领域,尤其涉及一种多功能眼科全自动测量方法及系统。
背景技术
眼科检查包括视力检查和眼科疾病检查,二者都需要通过眼科检测设备对待测眼进行检测,然后输出相关数据,再由医生去判断或诊断。相关数据包括球镜度、柱镜度、轴位、眼轴长度、角膜前后表面曲率、角膜厚度、前房深度、晶状体厚度、晶状体前后表面曲率、白到白距离、瞳孔直径等。遇到需要对眼科疾病进行治疗时,往往需要较多的数据辅助才能计算出较佳的治疗配方。此时需要医生多次操作检测设备进行多次检测,由于目前的眼科检测设备都是依靠医生手动调节来寻找待测眼的检测位置,才能进入检测阶段,多次检测就需要多次手动调节来寻找待测眼的检测位置,并且手动调节的快慢依赖于医生的操作经验和对检测设备的熟练程度,这样使得整个检测流程较为繁杂和不便。
此外,如今患白内障眼病的老年人越来越多,移植人工晶体是目前广泛使用的治疗白内障的有效方案。但人工晶体的计算所需要的参数要求较多,如角膜前后表面曲率、角膜厚度、前房深度、晶状体厚度、晶状体前后表面曲率、眼轴长、白到白距离、瞳孔直径等。测量的参数较多,但往往需要多种医疗设备检测后,才能获得上述完整数据。
光学相干层析成像(OCT,Optical Coherence Tomography)是一种新兴的光学成像技术,相对于传统的临床成像手段来说,具有分辨率高、成像速度快、无辐射损伤、价格适中、结构紧凑等优点,是基础医学研究和临床诊断应用的重要潜在工具。当前,在多种使用光学仪器的眼科设备中,用于眼科检查和治疗的OCT装置已经成为眼科疾病诊断不可或缺的眼科设备。然而,目前的OCT设备专业性强操作复杂,医生都需要专业培训才会操作,操作过程繁琐如果初期没有调整好对检测质量和可行度影响较大。
以上背景技术内容的公开仅用于辅助理解本发明的构思及技术方案,其并不必然属于本专利申请的现有技术,在没有明确的证据表明上述内容在本专利申请的申请日已经公开的情况下,上述背景技术不应当用于评价本申请的新颖性和创造性。
发明内容
为解决上述技术问题,本发明提出一种多功能眼科全自动测量方法及系统,只需一台设备,就能自动获得多个需要测量的数据,对于患者的检测来说,不仅能提高测量的方便性,还能提高测量的准确性。
为了达到上述目的,本发明采用以下技术方案:
本发明的一个实施例公开了一种多功能眼科全自动测量方法,采用多功能全自动测量系统进行测量,所述多功能全自动测量系统包括主体模块、探头组件、三维移动控制单元,所述主体模块包括控制装置,所述探头组件安装在所述三维移动控制单元上以通过所述三维移动控制单元调节所述探头组件的三维位置,其中所述探头组件包括光程调节装置、光路扫描装置(1109)、眼后节OCT场镜(1301)、眼前节OCT插入镜(1501)、前置二向色镜(1303)、接目物镜(1305)和第一移动控制单元,其中所述眼前节OCT插入镜(1501)安装在所述第一移动控制单元上以使得所述眼前节OCT插入镜(1501)能够插入至光路中或移出至光路以外;所述多功能眼科全自动测量方法包括以下步骤:S1:监测到待测眼置于所述接目物镜(1305)的正前方之后,所述主体模块中的控制装置根据所述待测眼的位置调节所述三维移动控制单元以对所述探头组件进行自动调节;S2:所述主体模块中的控制装置驱动所述第一移动控制单元控制所述眼前节OCT插入镜(1501)插入至光路中并调节所述光程调节装置,所述主体模块提供的测量光穿过所述光程调节装置,经所述光路扫描装置(1109)反射后穿过所述眼后节OCT场镜(1301)、所述眼前节OCT插入镜(1501)后,再经所述前置二向色镜(1303)反射至所述接目物镜(1305)进入待测眼(E)并聚焦于待测眼眼前节中以返回眼前节光信号传递至所述主体模块,所述主体模块提供参考光并能够利用所述参考光与所述眼前节光信号进行干涉并采集经过干涉得到的眼前节干涉光信号以采集得到所述待测眼(E)的眼前节OCT图像;S4:所述主体模块中的控制装置驱动所述第一移动控制单元控制所述眼前节OCT插入镜(1501)移出至光路以外并调节所述光程调节装置,所述主体模块提供的测量光穿过所述光程调节装置,经所述光路扫描装置(1109)反射后穿过所述眼后节OCT场镜(1301)后,再经所述前置二向色镜(1303)反射至所述接目物镜(1305)进入待测眼(E)并聚焦于待测眼眼底(Er)中以返回眼后节光信号传递至所述主体模块,所述主体模块能够利用所述参考光与所述眼后节光信号进行干涉并采集经过干涉得到的眼后节干涉光信号以采集得到所述待测眼(E)的眼后节OCT图像。
本发明的另一个实施例公开了一种多功能眼科全自动测量系统,包括主体模块、探头组件、三维移动控制单元,所述探头组件安装在所述三维移动控制单元上以通过所述三维移动控制单元调节所述探头组件的三维位置,其中:所述探头组件包括光程调节装置、光路扫描装置(1109)、眼后节OCT场镜(1301)、眼前节OCT插入镜(1501)、前置二向色镜(1303)、接目物镜(1305)和第一移动控制单元,其中所述眼前节OCT插入镜(1501)安装在所述第一移动控制单元上以使得所述眼前节OCT插入镜(1501)能够插入至光路中或移出至光路以外;当所述第一移动控制单元控制所述眼前节OCT插入镜(1501)插入至光路中时,所述主体模块提供的测量光穿过所述光程调节装置,经所述光路扫描装置(1109)反射后穿过所述眼后节OCT场镜(1301)、所述眼前节OCT插入镜(1501)后,再经所述前置二向色镜(1303)反射至所述接目物镜(1305)进入待测眼(E)并聚焦于待测眼眼前节中以返回眼前节光信号传递至所述主体模块,所述主体模块提供参考光并能够利用所述参考光与所述眼前节光信号进行干涉并采集经过干涉得到的眼前节干涉光信号以得到所述待测眼(E)的眼前节OCT图像;当所述第一移动控制单元控制所述眼前节OCT插入镜(1501)移出至光路以外时,所述主体模块提供的测量光穿过所述光程调节装置,经所述光路扫描装置(1109)反射后穿过所述眼后节OCT场镜(1301)后,再经所述前置二向色镜(1303)反射至所述接目物镜(1305)进入待测眼(E)并聚焦于待测眼眼底(Er)中以返回眼后节光信号传递至所述主体模块,所述主体模块能够利用所述参考光与所述眼后节光信号进行干涉并采集经过干涉得到的眼后节干涉光信号以得到所述待测眼(E)的眼后节OCT图像。
与现有技术相比,本发明的有益效果在于:本发明公开的多功能眼科全自动测量系统中设置眼前节OCT插入镜,并将该眼前节OCT插入镜安装在第一移动控制单元上,可以通过主体模块中的控制装置驱动该第一移动控制单元快速控制眼前节OCT插入镜是否插入到光路中,从而能够快速实现眼前节OCT成像系统和眼后节OCT成像系统的切换,有利于提高眼前后节OCT成像质量,而且只需采用一个移动控制单元即可实现前后节快速切换,成本低廉;其中眼后节OCT成像时等光程面位于人眼视网膜,而眼前节OCT成像时等光程面位于人眼前节,无需通过调节参考臂的光程即可实现不同部位的OCT成像,从而实现多个需要测量的数据的快速准确测量。
在进一步的方案中,本发明还具有以下有益效果:
(1)在接目物镜的下方设置斜角度眼前节摄像模块,可以辅助待测眼前后定位,借助该斜角度眼前节摄像模块可以初步搜索虹膜或瞳孔位置,从而避免眼动的影响,使得待测眼数据的测量结果更精确。
(2)在该测量系统中还设置虹膜摄像模块,可以结合虹膜自动识别技术,用于控制探头组件的移动,从而实现待测眼的检测;其中获得的虹膜图像,能够从中测量瞳孔直径及白到白距离等参数。
(3)在该测量系统中还设置固视光学模块,可以实现人眼固视光路,以满足左右眼固视。
(4)接目物镜和斜角度眼前节摄像模块相对固定地安装在第二移动控制模块上且能够沿着测量光到待测眼的光路方向移动,从而可以针对不同视力的人眼进行屈光补偿,实现不同部位人眼成像。进一步地,固视光学模块与眼后节OCT成像共用该屈光调节装置,减少固视光路的运动件,并实现固视光路与眼后节OCT光路共焦,有利于被测人眼的固视及眼后节OCT图像的采集。
(5)在该测量系统中还设置测屈光模块,以结合测屈光技术,能够测得待测眼屈光度,并用于指导眼后节OCT成像或者固视光路的屈光调节,从而提高眼后节OCT图像的信噪比及固视标的清晰度。
(6)在公开了多功能眼科全自动测量系统的基础上,一方面可以实现快速切换功能,实现对待测眼不同深度进行测量,提高了OCT系统的探测范围(前后节成像),切换系统稳定,定位精确,不影响系统信噪比;另一方面能实现光束在不同位置分别聚焦,可针对不同视力的人眼实现高质量的不同部位的OCT成像,具有较高的横向分辨率。通过快速切换前后节成像OCT系统能够获得人眼众多参数数据,如角膜曲率、角膜厚度、前房深度、晶状体厚度、晶状体表面曲率、白到白距离、瞳孔直径等。进一步地,结合眼前节摄像及自动识别技术能够辅助仪器的自动化检测。结合屈光测量技术能够测得待测眼屈光度,并指导眼后节OCT采集过程中的屈光调节,从而获得更强更好的眼后节OCT图像。通过虹膜识别技术、自动测屈光技术、前节OCT图像自动识别技术、后节OCT图像自动识别等技术,实现系统的全自动化探测。
(7)本发明公开的多功能眼科全自动测量方法,由检测设备自动感应待测眼并判断待测眼是否处于检测工位上;并基于第一移动控制单元、眼前节OCT插入镜、斜角度眼前节摄像模块、虹膜摄像模块、测屈光模块等的设置,由检测设备自动判断待测眼的位置;由检测设备根据待测眼的位置,其自动调节系统自动调节待测眼和/或检测设备的至少一部分的位置使待测眼与检测设备的检测系统自动匹配,从而使待测眼进入检测状态;然后进入检测阶段,即自动启用检测设备的检测系统对待测眼进行自动检测,这样整个检测流程通过自动化来实现,快捷方便。其中通过自动检测待测眼是否到工位,并自动完成待测眼与监测设备的自动匹配,简化检测流程并能够获得众多人眼重要参数的准确数据,满足医生临床诊断的需要。可以使OCT眼科设备运用到更多应用场景(比如社区、远程医疗)变为可能。
(8)通过该多功能眼科全自动测量系统进行全自动测量,可以一次测量采集前后节图像,有利于医生操作,提高诊断速度,提高医患交互体验。具有成本低、速度快、精度高、多功能等众多优点。
(9)本发明的方案采用频域光学相干断层扫描技术,相比时域系统而言,扫描成像速度快、成像分辨率高,但探测深度浅;相比扫描频域光学相干断层扫描技术,扫描速度、分辨率等相当,成本低许多,但探测深度浅。
附图说明
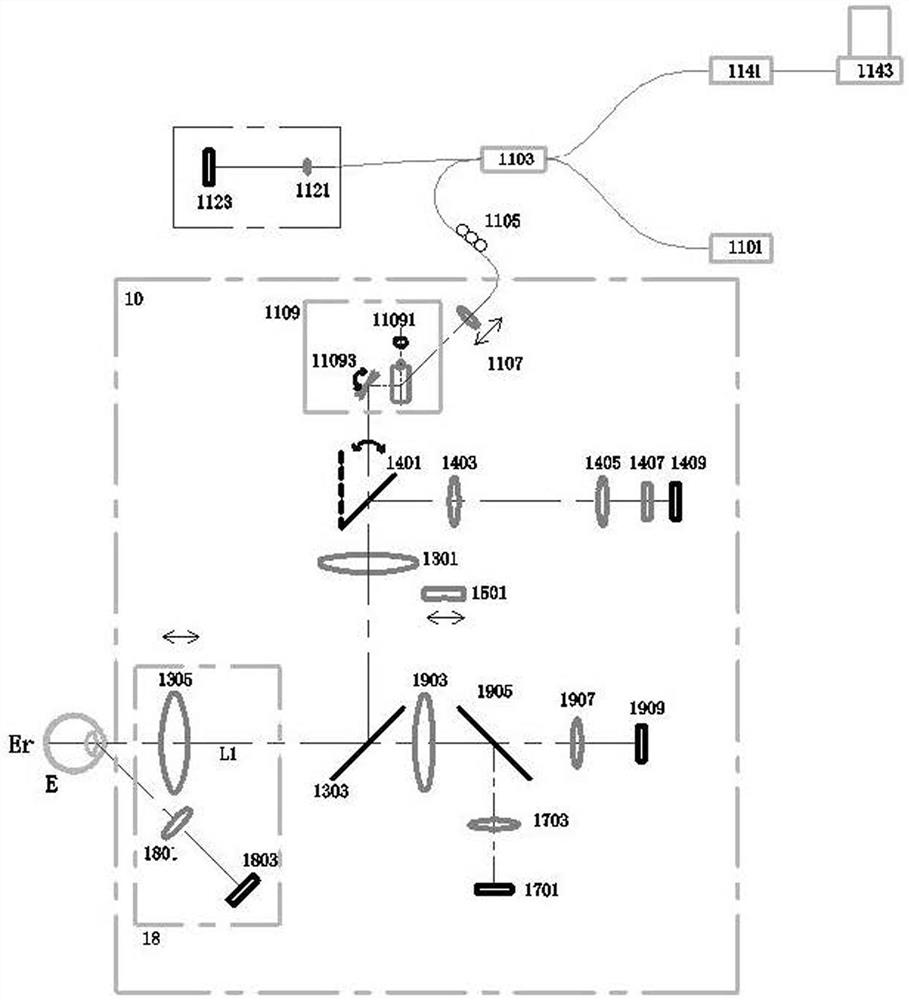
图1是本发明优选实施例的多功能眼科全自动测量系统的结构示意图;
图2是眼后节OCT成像系统的结构示意图;
图3是眼前节OCT成像系统的结构示意图;
图4是测屈光系统的结构示意图;
图5a是虹膜摄像模块的结构主视图;
图5b是虹膜摄像模块的光路结构俯视图;
图6是斜角度眼前节摄像模块的结构示意图;
图7是固视光学模块的结构示意图;
图8是本发明优选实施例的多功能眼科全自动测量方法的部分流程示意图;
图9是多功能眼科全自动测量方法的实现结构框图;
图10是多功能眼科全自动测量方法的实现的具体结构框图;
图11是自动感应待测眼的实现结构框图;
图12是自动感应待测眼的流程示意图;
图13是待测眼调整的流程示意图;
图14是探头组件前后调整的流程示意图;
图15是瞳孔居中的流程示意图;
图16是控制上下左右电机移动的流程示意图;
图17是居中监测的流程示意图。
具体实施方式
下面结合具体实施方式并对照附图对本发明做进一步详细说明。其中相同的附图标记表示相同的部件,除非另外特别说明。应该强调的是,下述说明仅仅是示例性的,而不是为了限制本发明的范围及其应用。
下面结合附图通过具体实施例对本发明进行详细的介绍,以使更好的理解本发明,但下述实施例并不限制本发明范围。另外,需要说明的是,下述实施例中所提供的图示仅以示意方式说明本发明的基本构思,附图中仅显示与本发明中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的形状、数量及比例可为一种随意的改变,且其组件布局形态也可能更为复杂。
需要理解的是,术语“上”、“下”、“前”、“后”、“内”、“外”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明实施例和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
如图1所示,本发明优选实施例公开一种多功能眼科全自动测量系统,包括主体模块、探头组件10和三维移动控制单元(图中未示),探头组件10安装在三维移动控制单元上以通过三维移动控制单元调节探头组件的X/Y/Z轴的三维位置,其中本实施例中定义X轴定义为垂直于纸面的轴,Y轴定义为平行于纸面、上下方向上的轴,Z轴定义为平行于纸面、左右方向上的轴,也即X轴和Y轴方向分别是指与待测眼(E)外表面平行的平面上的横轴和纵轴方向,Z轴方向是指垂直于待测眼(E)外表面平行的平面的方向。
主体模块包括OCT光源1101、光纤耦合器1103、探测器1141、计算机1143、偏振控制器1105和参考臂模块,参考臂模块包括参考臂光路透镜1121和参考臂反射镜1123;其中计算机1143并不是传统意义上的PC电脑,而是能够进行运算、控制、存储、显示等功能集合的控制装置。
探头组件10包括光程调节装置、光路扫描装置1109、眼后节OCT场镜1301、眼前节OCT插入镜1501、前置二向色镜1303、接目物镜1305、斜角度眼前节摄像模块、虹膜摄像模块、固视光学模块、测屈光模块、第一移动控制单元(图中未示)、第二移动控制单元(图中未示)、第三移动控制单元(图中未示)和旋转控制单元(图中未示),光路扫描装置1109采用二维扫描机构,由X轴方向扫描装置11091和Y轴方向扫描装置11093构成。
光程调节装置包括光纤准直镜1107和光纤头(图中未示),斜角度眼前节摄像模块包括斜角度眼前节摄像透镜1801和斜角度眼前节摄像装置1803,虹膜摄像模块包括照明光源1901、虹膜注视中继透镜1903、虹膜注视分光镜1905、虹膜摄像透镜1907和虹膜摄像装置1909,固视光学模块包括固视光源1701和注视光路透镜1703,测屈光模块包括屈光分光镜1401、第一屈光透镜1403、第二屈光透镜1405、微透镜阵列元件1407和屈光摄像装置1409;其中第一移动控制单元连接眼前节OCT插入镜1501以控制眼前节OCT插入镜1501能够插入至光路中或移出至光路以外,接目物镜1305和斜角度眼前节摄像模块相对固定共同构成组合模块18,第二移动控制单元连接组合模块18以控制组合模块能够沿着Z轴方向移动以实现屈光调节;第三移动控制单元连接光纤准直镜1107以控制光纤准直镜1107沿着光路方向移动以改变样品臂光路的光程;旋转控制单元连接屈光分光镜1401以控制屈光分光镜1401能够旋转至光路扫描装置1109和眼后节OCT场镜1301之间的光路中或移出至光路扫描装置1109和眼后节OCT场镜1301之间的光路以外。
通过计算机1143控制第一移动控制单元以带动眼前节OCT插入镜1501的插入或移出光路,配合控制第三移动控制单元以带动光纤准直镜1107沿着光轴平动,实现光路切换和待测眼不同部位的OCT成像。OCT光源1101采用弱相干光源,输出波长约为近红外光,具体可以选择中心波长840nm的具有一定带宽的红外光源,比如超辐射发光二极管SLED,或者中心波长1050nm的具有一定带宽的红外光源,再比如扫频光源。OCT光源1101发出的测量光经过光纤耦合器1103向参考臂模块和样品臂模块提供光,参考臂模块具有已知长度并通过参考臂反射镜1123将光反射回光纤耦合器1103中。样品臂模块向待测眼E提供光,来自待测眼E散射回来的光经过样品臂、偏振控制器1105与参考臂模块反射回来的光在光纤耦合器1103中发生干涉,干涉光被探测器1141探测到,再经过计算机1143处理,最后显示出待测眼E的OCT图像;其中通过光路扫描装置1109对待测眼E进行扫描,实现OCT的断层成像。
如图2所示,本发明优选实施例的多功能眼科全自动测量系统能够作为眼后节OCT成像系统,其中光纤准直镜1107、光路扫描装置1109、眼后节OCT场镜1301、前置二向色镜1303、接目物镜1305共同构成眼后节OCT样品臂模块。其中光路扫描装置1109可以是一维光路切换扫描装置,亦可以是二维甚至三维的,也即光路扫描装置1109可以实现对待测眼E的一维到多维的扫描。光纤准直镜1107连接样品臂光纤,其整体由第三移动控制单元带动,第三移动控制单元可以是一电机,能够沿其光轴平动,从而改变样品臂光路的光程。当进行眼后节OCT成像时,OCT光源1101输出的光经过光纤耦合器1103向样品臂模块和参考臂模块提供光。其中传输眼前节OCT样品臂模块的光经光纤准直镜1107出射,经光路扫描装置1109的反射;此时光路扫描装置1109由计算机1143控制,光束经过光路扫描装置1109反射后,穿过眼后节OCT场镜1301,经过前置二向色镜1303反射到接目物镜1305,最后经过人眼E汇聚到人眼眼底Er。眼后节OCT成像光路系统的探测光束满足扫描光束中心线汇聚于人眼瞳孔附近,而任意时刻OCT光束聚焦于人眼眼底Er。针对不同人眼(其屈光度不同),通过第二移动控制单元来调节接目物镜1305,使得OCT光束都能汇聚于人眼眼底Er,即光束聚焦于视网膜上,这样能有效提高视网膜测量时,OCT图像的信噪比及横向分辨率。前置二向色镜1303可对OCT光源1101发出的信号光反射,并且对来自固视光学模块170中固视光源1701发出的固视光透射,而且还能对来自虹膜摄像模块中照明光源1901发出的照明光进行透射。眼前节OCT插入镜1501被计算机1143控制,切换出眼后节OCT成像光路。另外屈光分光镜1401由计算机1143控制,切换出眼后节OCT成像光路。测量眼底时,通过扫描装置11091和11093扫描;通过光纤准直镜1107结合样品臂光纤头(未图示)的整体平动,实现针对不同人眼眼底的光程匹配;通过接目物镜1305沿光轴平动,来针对不同人眼调屈;最终实现眼后节OCT图像的采集,从而获得视网膜厚度等人眼结构重要参数。
如图3所示,本发明优选实施例的多功能眼科全自动测量系统能够作为眼前节OCT成像系统,其中光纤准直镜1107、光路扫描装置1109、眼后节OCT场镜1301、眼前节OCT插入镜1501、前置二向色镜1303、接目物镜1305共同构成眼前节OCT样品臂模块。当进行眼前节OCT成像时,OCT光源1101输出的光经过光纤耦合器1103向样品臂模块和参考臂模块提供光。其中传输眼前节OCT样品臂模块的光经光纤准直镜1107出射,经光路扫描装置1109反射,透射眼后节OCT场镜1301、眼前节OCT插入镜1501,经前置二向色镜1303的反射,再透射接目物镜1305,最后经过人眼E会聚到人眼前节。眼前节OCT成像光路系统的探测光束满足OCT光束聚焦于人眼前节。此时,计算机1143控制第一移动控制单元启动将眼前节OCT插入镜1501插入光路中。而屈光分光镜1401由计算机1143控制旋转控制单元启动来切换出眼前节OCT成像光路。测角膜及晶状体前后表面时,OCT光束聚焦于眼前节中部区域,能有效提高角膜、晶状体前后表面测量时,OCT图像的信噪比及横向分辨率。测量眼前节OCT图像时,通过光路扫描装置1109扫描;通过光纤准直镜1107结合样品臂光纤头(未图示)的整体平动,实现OCT测量所需的光程匹配;通过接目物镜1305沿光轴平动,来实现调焦。眼前节样品臂模块,能获得角膜、晶状体前后表面的OCT图像,从而能获得角膜前后表面曲率、角膜厚度、前房深度、晶状体厚度、晶状体前后表面曲率等人眼结构重要参数。
如图4所示,本发明优选实施例的多功能眼科全自动测量系统能够作为测屈光系统,其中屈光分光镜1401、第一屈光透镜1403、第二屈光透镜1405、微透镜阵列元件1407和屈光摄像装置1409共同构成测屈光模块,将测屈光模块中的屈光分光镜1401通过旋转控制单元插入到眼后节OCT成像系统中光路扫描装置1109和眼后节OCT场镜1301之间的光路时,即构成测屈光系统。其中屈光分光镜1401由计算机1143控制旋转控制单元以切换入屈光测量光路。由OCT光源1101出光,经光纤耦合器1103分光,部分光进入样品臂光路,经偏振控制器1105调节偏振态,及光路扫描装置1109的反射。接着该光穿过屈光分光镜1401,被部分反射,部分透射。其中透射的部分光又穿过眼后节OCT场镜1301,经前置二向色镜1303反射到接目物镜1305,最后经过人眼E入射到人眼眼底Er。眼底反射该光后,光沿原路返回,经人眼E、接目物镜1305,经前置二向色镜1303反射,穿过眼后节OCT场镜1301后,入射屈光分光镜1401。此时该返回光又被屈光分光镜1401分光,其中反射的部分光转向第一屈光透镜1403,穿过第一屈光透镜1403、第三屈光透镜1405、微透镜阵列元件1407,后被屈光摄像装置1409拍摄到。计算机1143根据所拍摄的眼底反光图像,从而计算出待测眼屈光度。该计算屈光原理采用的是SHACK-HARTMANN波前测量原理。该测屈光模块140利用了OCT光源1101作为光源,节约了光源成本,并简化了光路结构。测屈光模块140工作时,光路扫描装置1109需处于设定的工作位置,使得出射光路扫描装置1109的OCT光源1101光沿上图光轴。而屈光分光镜1401需借助快门切换装置(未图示)切入光路中,用于分光。屈光分光镜1401可采用部分分光镜设计或者偏振分光镜设计。另外在进行屈光测量时接目物镜1305需移动至设定的工作位置,比如调屈状态处于0度屈光度时所处的工作位置。
如图5a和图5b所示绘示了虹膜摄像模块,其中照明光源1901、虹膜注视中继透镜1903、虹膜注视分光镜1905、虹膜摄像透镜1907和虹膜摄像装置1909共同构成虹膜摄像模块。该模块能用于虹膜预览,以便于指导医生操作仪器,让探头光路对准待测眼;或者通过自动识别虹膜中心位置,用于指导探头组件10自动进行三维移动,实现对待测眼瞳孔的对准,从而实现对待测眼的检测。照明光源1901(红外光)发出的光照射到待测眼E的眼前房,光经眼前房组织反射,反射光穿过接目物镜1305、前置二向色镜1303,穿过虹膜注视中继透镜1903,并经虹膜注视分光镜1905透射、再经虹膜摄像镜1907,最后被虹膜摄像装置1909拍摄到。检测者使用下颚托装置(未图示)使被测者头部固定,并让被测者固视系统的固视标,以使得被测者眼固定。之后,检测者一边通过观察计算机1143的显示屏,一边通过操作杆控制下颚托装置以及探头组件10等的移动,以使待测眼E的虹膜进入虹膜摄像装置1909中,并且眼前节像呈现在计算机1143的显示屏中。或者通过自动识别虹膜中心位置,用于指导探头组件10自动进行三维移动,实现对待测眼瞳孔的对准,从而实现对待测眼的检测。虹膜摄像模块能获得白到白距离、瞳孔直径等人眼结构重要参数。其中图5b中照明光源1901的分布只是示意,亦可采用其他分布方式,只需该照明光源1901照射待测眼前节即可,数量可以1个或者多个。
如图6所示绘示了斜角度眼前节摄像模块,其中斜角度眼前节摄像透镜1801和斜角度眼前节摄像装置1803共同构成斜角度眼前节摄像模块,斜角度眼前节摄像模块与接目物镜1305相对固定,即接目物镜1305及斜角度眼前节摄像模块共同构成组合模块18。该组合模块18由第二移动控制单元带动,第二移动控制单元可以是一电机,能够沿Z轴方向移动,从而实现屈光调节。照明光源1901(红外光)发出的光照射到待测眼E的眼前房,光经眼前房组织反射。反射光穿过斜角度眼前节摄像透镜1801,最后被斜角度眼前节摄像装置1803拍摄到。斜角度眼前节摄像模块分布于接目物镜1305的下方,例如斜角度眼前节摄像模块可以设置在接目物镜1305的左下侧、右下侧或正下方,其中优选为正下方,如果分布在探头组件10的X方向左侧/右侧,不利于双眼的一并使用,如果分布在接目物镜1305的上方,易受眼皮遮挡。具体地,待测眼E至斜角度眼前节摄像装置1803形成的光路与待测眼E至接目物镜之间的光路呈预设角度,例如45°。斜角度眼前节摄像模块相比于虹膜摄像模块,斜角度眼前节摄像模块的拍摄范围更大,景深更大,但成像分辨率较虹膜摄像模块略差。相比而言,虹膜摄像模块采用同轴设计,但其成像范围受探头组件10内的其他光路限制,尤其工作距等的限制,导致其成像范围小。另外虹膜摄像模块还用于测量虹膜直径及瞳孔直径等数据,故要求其拥有较高的成像质量,其分辨率提高了,但景深便受到一定的限制。当探头组件10沿Z轴方向前后大范围移动时,由于其所拍摄的眼前节摄像不够清晰,易发生自动识别虹膜或者瞳孔位置异常,故本发明优选实施例的多功能眼科全自动测量系统引入了斜角度眼前节摄像模块。故系统初始搜索虹膜或者瞳孔位置,可借助斜角度眼前节摄像模块拍摄的图像,但精确定位虹膜中心或者瞳孔中心,采用的是虹膜摄像模块,通过虹膜摄像模块和斜角度眼前节摄像模块的结合使用,能够避免虹膜摄像模块的景深限制问题或拍摄的眼前节摄像不够清晰等问题。由于处于斜角度分布,故斜角度眼前节摄像模块结合虹膜摄像模块能够进一步判断待测眼E的Z轴方向位置,辅助探头组件10调节待测眼E的工作位置。
如图7所示绘示了固视光学模块,其中固视光源1701和注视光路透镜1703共同构成固视光学模块。固视光学模块170中的固视光源1701用于待测眼E固视的固视标(内部固视标)。来自固视光源1701的光,通过注视光路透镜1703,经虹膜注视分光镜1905的反射,透射虹膜注视中继镜1903及前置二向色镜1303后,该光经过接目物镜1305再入射到被检人眼E;最后,内部固视标被投影到被检人眼E的眼底Er。固视光源1701可采用单点LED,或者LCD屏、OLED屏或者LED阵列屏等。当进行眼底OCT成像时,不同人眼观察固视点时,固视点的清晰程度不同,这给被测者固视时造成不舒适,这不便于被测眼的固视及固定。而本发明优选实施例中由于眼底OCT光路经过接目物镜1305调屈后,能聚焦于眼底视网膜Er上,即人眼能看清晰扫描线;且由于眼后节OCT光路与固视光路,共用接目物镜1305,便能实现对于不同人眼都能看清固视标。
本发明采用前后节快速切换OCT系统,结合眼前节摄像及自动识别技术,屈光测量技术,能够解决人眼众多光学参数的检测,从而满足不同部位测量的需要,能够获得众多人眼重要参数的准确数据,满足医生临床诊断的需要。通过虹膜识别技术、自动测屈光技术、前节OCT图像自动识别技术、后节OCT图像自动识别等技术,实现系统的全自动化探测。采用自动检测方法,可以简化检测操作,减少检测时间,提高检测质量和可行度。因此,通过上述本发明优选实施例公开的多功能眼科全自动测量系统能够实现多功能眼科全自动测量方法,具体全自动检测方案如下。
如图8所示,该多功能眼科全自动测量方法包括:自动感应待测眼001、电机复位002、待测眼调整003、探头组件前后调整004、瞳孔居中005、瞳孔监测006、自动扫描检测007。如图9所示,该多功能眼科全自动测量方法通过电子控制组件C01、自动控制单元C02、自动检测程序C03来实现,其中电子控制组件C01为硬件模块,包括压力传感器、三维移动控制单元(包括上下电机、左右电机、前后电机)、第一移动控制单元(包括前后节电磁铁)、第二移动控制单元(包括屈光电机)、第三移动控制单元(包括光程电机)、偏振电机。自动控制单元C02是微控制单元MCU,自动控制单元C02与硬件模块C01连接并通信,自动控制单元C02给硬件模块C01发送指令或读取硬件状态。自动控制单元C02与程序主机相连,自动检测程序C03运行在程序主机上。其中自动控制单元C02、程序主机分别为计算机1143的一部分,自动检测程序C03为运行在计算机1143中的程序。如图10,自动检测程序C03包括:采集程序C04、自动控制程序C05。自动控制程序C05包括自动感应待测眼001和自动控制模块。自动控制模块包括电机复位002、待测眼调整003、探头组件前后调整004、瞳孔居中005、瞳孔监测006、自动扫描检测007,直到待测眼所有检测完成时才会退出。进一步地,该多功能眼科全自动测量方法通过采集单元C07、采集程序C04、自动控制单元C02、自动控制程序C05来实现。自动控制单元C02与采集单元C07都与程序主机相连,程序主机中运行自动控制程序C05和采集程序C04。采集程序C04主要控制采集单元C07,获取采集图像如前后节OCT图像、虹膜图像(通过虹膜摄像模块拍摄的图像);该采集单元C07即为本发明优选实施例的多功能眼科全自动测量系统的硬件结构部分。自动控制程序C05主要与自动控制单元C02通信,控制电子控制组件C01。电子控制组件C01嵌入在采集单元C07中,电子控制组件C01与自动控制单元C02电性相连,用于控制采集单元C07自动运行。
如图11所示,自动感应待测眼001包括:压力传感器0010、自动控制单元0011、自动感应模块0012。压力传感器0010是压力敏和力敏传感器,无压力时传感器在10兆欧以上,等效于断路;不同大小压力施加于传感器会产生电阻变化,电阻变化进一步转化为电压变化,变化的电压作为输出电压通过Vout连接到自动控制单元C02。压力传感器0010的Vout与自动感应控制单元0011的外部中断IO口相连。自动感应控制单元0011与程序主机外部IO口,连接方式可以是串口、USB等。自动感应控制模块0012在程序主机上运行,可以通过自动感应控制单元0011接口不断读取压力传感器状态。压力传感器状态包括两个状态,S01无压力状态即无待测眼状态,S02有压力状态即有待测眼状态。如图12,检测系统启动时自动感应模块0012开始运行,直到自动检测程序C03运行结束时才退出。如果压力传感器状态为有待测眼时,判断自动控制程序C05是否运行,自动控制程序C05如果没有运行处于停止状态,启动自动控制模块即进入电机复位002流程。如果自动控制模块启动之后,依然要调用待测眼自动感应待测眼001读取压力传感器状态,监测待测眼是否离开。如果监测到待测眼已经离开,应当退出自动控制模块。
电机复位002包括:左右电机复位、上下电机复位、前后电机复位(也即三维移动控制单元复位),屈光电机复位(也即第二移动控制单元复位),光程电机复位(也即第三移动控制单元复位),偏振电机复位(即主体模块中的偏振控制器1105的控制电机),前后节电磁铁复位(也即第一移动控制单元复位)。其中电机复位002就是各个电机移动到程序预设位置。电机复位时,自动控制程序C04读取配置文件的预设位置,并调用接口向自动控制单元C02发送电机移动指令。前后节电磁铁可以驱动眼前节OCT插入镜1501抽离或插入光路,自动控制模块启动时,前后节电磁铁复位就是前后节电磁铁驱动插入镜插入光路用于检测眼前节。偏振电机复位就是移动偏振控制器1105得到一个最佳偏振方向,使测量光反射后的反射光与参考光能够产生最强干涉光,即最强OCT信号。光程电机复位就是将光纤探头与调焦透镜水平移动到离待测眼最远位置,因为检测系统开始时检测前节OCT信号。屈光电机复位就是屈光电机驱动屈光调节元件(即接目物镜1305和斜角度眼前节摄像模块相对固定共同构成的组合模块18)移动,刚启动自动控制模块时,屈光电机复位到0D位置。0D位置是自动控制模块设定的默认屈光度数,在后续流程中再通过屈光调整流程,将屈光调节元件移动待测眼实际屈光度数上。本实施例中屈光电机复位也可以复位到用户输入的屈光数位置上,自动控制模块中不包括屈光调节流程控制。上下、左右、前后三个电机位于探头组件10的下面,三个电机的移动可以移动整个探头组件10,从而控制探头组件相对于待测眼的位置;该测量探头就是光路图中接目物镜的位置。左右眼复位到独立的经验位置。电机复位002是探头组件先复位到待测眼右眼测量位置。所以,左右电机复位先复位到设备右端,所述上下电机复位复位到上下电机中间位置,为了模拟测量时从后往前找信号过程所述前后电机复位复位到离待测眼最远的位置。其中上下电机、左右电机、前后电机、屈光电机、光程电机、偏振电机为步进电机,它们与自动控制单元C02电性相连。电机复位时,自动控制模块调用接口发送指令到自动控制单元C02,自动控制单元C02再控制电机移动。如图12所示,启动检测程序包括:等待待测眼上眼;读取压力传感器状态,判断是否有待测眼,如果是则判断自动控制模块是否运行,如果否,则返回等待待测眼上眼;判断自动控制模块不在运行时,执行电机复位002;判断自动控制模块在运行时,读取压力传感器状态,判断是否有待测眼,如果是,则持续读取压力传感器状态判断是否有待测眼,如果否,则判断待测眼是否离开,如果是,则退出自动控制模块,再返回等待待测眼上眼步骤。
具体地,各个电机复位并运动至相应的起始工作位置。其中电机复位含:偏振控制器1105的控制电机(偏振电机),探头组件10的X/Y/Z三维移动控制电机(左右电机、上下电机、前后电机),组合模块18调屈控制电机(屈光电机),光纤准直镜1107调光程控制电机(光程电机),屈光分光镜1401快门切换控制电机,前后节电磁铁(驱动眼前节OCT插入镜1501移动,也即第一移动控制单元)等。设定的起始工作位置分别为:偏振控制器1105的控制电机使得样品臂偏振态调至使得返回信号光的偏振态与参考臂的偏振态基本一致的位置;探头组件10组件的X/Y/Z三维移动控制电机,若针对待测者左/右眼,移动到距离该眼一定的工作位置。组合模块18调屈控制电机,运动至屈光状态基本处于0D的位置;其中0D的位置也是指,出射接目物镜1305的探测光是准直光时组合模块18所处的位置。光纤准直镜1107调光程控制电机,运动至测量眼前节OCT所需样品臂光程长度的位置;屈光分光镜1401快门切换控制电机使得,屈光分光镜1401切换出眼前节OCT光路。前后节电磁铁使得眼前节OCT插入镜1501插入眼前节OCT光路。计算机1143控制光路扫描装置1109进行扫描,并控制OCT光源1101、固视光源1701、照明光源1901等出光,准备进行采集。
本发明优选实施例的多功能眼科全自动测量系统置于一平台之上,该系统还包括头部支撑装置和压力感应器,其中头部支撑装置包括两个面颊托、一额头托和两个额头托支柱,额头托支柱固定设置在平台之上,两个额头托支柱和额头托首尾相连成倒U形结构;面颊托位于U形结构中间,面颊托下面与额头托平行。在检测工况下,被测者面颊依靠在面颊托上,并将额头紧靠在额头托,此时压力传感器能够感应到有待测者的头部置于该头部支撑装置,也即有待测眼置于所述接目物镜1305的正前方,斜角度眼前节摄像模块设置于测量系统的探头主镜头(也即接目物镜1305)的下面。斜角度眼前节摄像模块与接目物镜1305垂直方向的距离记为Ly,检测探头伸到最前时候人眼与探头主镜头水平方向距离记为Lz,斜角度眼前节摄像模块与水平台倾角记为theta0。斜角度眼前节摄像模块成像时可能存在径向畸变,采用张氏标定法或者其他同等效果标定法,计算出斜角度眼前节摄像模块的畸变矫正系数k1、k2。其中Ly、Lz、theta0、k1、k2均作为参数配置在参数文件中,每一台设备会有些不同,程序启用时由自动控制模块读取。结合图8,电机复位002完成后进入开始待测眼调整003。如图13所示为待测眼调整003流程图,待测眼调整003并没有移动待测眼位置,待测眼只需将额头和面颊分别紧靠额头托和面颊托上,然后通过移动上下左右电机将瞳孔移动到检测设备探头的主镜头成像范围内。在待测眼E置于接目物镜1305(也即探头主镜头)的正前方时,照明光源1901投影到待测眼E形成白色的亮圈,待测眼调整003就是将瞳孔移动到光斑范围内,这样便可以保证后续的瞳孔居中005获取的虹膜图有虹膜,从而保证整个自动控制流程的成功。待测眼调整003步骤包括:首先连接并初始化45度仰视相机(即斜角度眼前节摄像模块),然后获取一张45度相机(即斜角度眼前节摄像模块)成像图,该成像图为彩色图;识别所述45度相机成像图中瞳孔坐标xy;其中45度仰视相机(即斜角度眼前节摄像模块)成像图具有径向畸变,所以需要畸变矫正计算真实坐标x0,y0;然后计算电机移动偏移量Hx、Hy,控制上下左右电机移动,再判断瞳孔是否进入光斑,如果是,则退出待测眼调整003步骤,如果否,则返回获取一张45度相机(即斜角度眼前节摄像模块)成像图步骤。
探头组件前后调整004步骤,就是根据虹膜图像清晰度移动前后电机,调整探头相对于待测眼的前后位置。所述虹膜图像就是虹膜摄像模块采集的待测眼眼前节像。虹膜摄像模块,用于拍摄确定待测眼E的瞳孔直径、白到白距离等参数所需图像,例如待测眼E的虹膜图像。虹膜摄像模块与计算机1143电性相连,计算机1143采集待测眼眼前节成像图虹膜图像。采集程序C04启动后,就会不断从计算机1143读取采集的虹膜图像。如图14所示,探头组件前后调整004启动时,首先启动前后电机向前移动,在前后电机向前移动的同时,不断获取虹膜图像,每次获取一张虹膜图像并计算图像清晰度,根据图像清晰度判断探头调整是否结束。如果图像还不够清晰,不满足退出调整条件,则判断电机的实时位置pos是否已经到达了经验位置stopval,如果到达了经验位置,退出所述探头组件前后调整004。如果没有到达经验位置,则继续再获取一张虹膜图像并计算清晰度,直到足够清晰或到达经验位置为止。其中探头组件前后调整004中,退出调整的虹膜图像清晰度判断标准为,虹膜图像已经可以看到瞳孔图像,这样可以保证退出探头组件前后调整004后进入瞳孔居中005时能够顺利进行。探头组件前后调整004过程中,每次获取一张虹膜图像前,都要判断是否需要退出,如果需要退出则应当直接停止探头组件前后调整004。需要退出包括许多情形,比如自动感应待测眼001监测到待测眼已经离开、用户在采集程序中点击“取消”操作等。其中,所述探头组件前后调整004与所述待测眼调整003并行运行,所述探头组件前后调整004启动前后电机向前运动的同时,连接并初始化所述45度仰视相机;所述前后相机向前移动过程中,不断获取所述45度仰视相机成像图,并计算上下左右电机移动偏移Hx和Hy,控制移动上下左右电机将瞳孔移动到检测设备探头主镜头的成像范围内。
瞳孔居中005,就是运用虹膜摄像模块获取虹膜图像计算瞳孔中心与虹膜成像模块成像中心的偏移坐标X和Y,指导XY电机移动调节检测探头与待测眼的相对上下和左右位置。如图15所示,所述瞳孔居中005过程中,获取一张虹膜图之前,需要判断是否需要退出所述瞳孔居中005,因为如果所述自动感应待测眼001监测到待测眼已经离开或采集软件C04被用户点击了“取消”按钮,都应当退出所述瞳孔居中005,退出所述瞳孔居中005之后还要退出自动控制模块C07,结束本次待测眼的检测;然后获取一张虹膜图像后,首先判断是否有虹膜,如果有则计算虹膜图像中的瞳孔中心与虹膜成像模块中心的偏移坐标X和Y;虹膜摄像模块中心其实就是虹膜图像的图像中心点,所述虹膜图像中心点也是所述接目物镜的中心;控制XY电机移动的目的,就是将瞳孔中心点与虹膜图像中心点对齐,本质上是将待测眼中心点与接目物镜中心对齐,接目物镜就是检测设备的检测探头;如果所述探头组件前后调整004退出时,虹膜图像还比较模糊算法会判断没有虹膜,所以需要将前后电机向前移动Step个脉冲,然后继续获取一张图像判断是否有虹膜;如果所述待测眼位置没有放好,例如虹膜摄像模块拍摄到上下眼皮,前后电机移动到最前面也不会找到虹膜;为了防止检测探头打眼,自动控制模块C07配置了安全距离,一旦小于该安全距离判断为打眼;如果打眼语音提示待测眼调整一下位置,并将前后电机退回到探头组件前后调整004退出的位置,即重新开始进入所述瞳孔居中005;如果待测眼已经离开,瞳孔居中就会陷入无限死循环,自动检测程序C03也会表现为卡死现象。为了避免这种意外情况发生,自动控制模块配置最大没有虹膜次数max,所述瞳孔居中虹膜图像连续找不到虹膜次数大于max时,退出所述瞳孔居中005,瞳孔居中005退出之后退出所述采集程序C04,结束本次检测设备对待测眼的检测。如图16所示,所述控制上下左右电机移动,首先设置XYflag=flase,开始居中时默认设置瞳孔没有对准,XYflag表示瞳孔是否对准;对于未对准XYflag=false的情况,要求偏离更小才算对准,否则移动所述上下左右电机,并始终以这个标准去判断是否对准;瞳孔对准后,XYflag=true,需要对瞳孔进行跟踪;瞳孔对准后,瞳孔居中跟踪过程中发现偏移较大且MoveFlag=flase,标记为动眼MoveFlag=true,等待一段时间约0.5秒,重新计算,如果再次计算偏移已没有那么大,则忽略上次的动眼,不移动电机;对于已对准的状态,瞳孔居中跟踪过程中发现偏移大于阈值且已经动眼了(MoveFlag=true),说明等待0.5秒后,眼睛并没有回来,当前已是第二次偏离,标记为未对准,移动上下左右电机;所述上下左右电机与自动控制单元C02电性相连,自动控制模块需要移动上下左右电机时,发送指令到自动控制单元C02,自动控制单元C02控制所述上下左右电机移动指定偏移。
瞳孔居中005结束后,待测眼和检测设备探头都进入正确位置,待测眼进入检测状态,进入检测状态时启动居中监测006流程,待测眼检测时,待测眼和检测设备都必须在正确位置上,居中监测006流程的功能就是保证待测眼和检测设备探头处于正确位置上。进入检测阶段后,检测设备的检测系统对待测眼进行自动检测,自动检测包括前节OCT扫描、屈光测量、后节OCT扫描,自动检测按时间顺序先后执行;执行自动检测的同时需要执行居中监测006,居中监测006须等到自动检测完成后方可退出。因为瞳孔居中005遇到意外情况(虹膜图像没有瞳孔)时已经退出了自动控制摸块,所以居中监测006并不需要考虑虹膜图像没有瞳孔情况;但是居中监测006需要判断是否退出居中监测006,如果自动感应待测眼001监测到待测眼已经离开或采集软件C04被用户点击“取消”按钮,都应当退出居中监测006。所以如图17所示,居中监测006流程包括:取一张虹膜图像,计算瞳孔中心和相机中心偏移xy,控制XY电机移动,然后判断是否退出居中监测,如果是,则退出居中监测,如果否,则返回取一张虹膜图像。
上述步骤待测眼调整003、探头组件前后调整004、瞳孔居中005、居中监测006具体可以总结为:待患者头部固定后,及患者眼固视后。斜角度眼前节摄像模块采集斜角度的眼前节图像,如含待测眼虹膜及瞳孔的图像。计算机1143需实时识别虹膜轮廓或者虹膜中心,或者识别瞳孔轮廓或者瞳孔中心,以确定待测眼的位置。待测眼的位置的判断的参考可以是多方面的多维度的,比如虹膜轮廓或者虹膜中心,或者瞳孔轮廓或者瞳孔中心,或者待测眼虹膜成像(斜角度眼前节摄像模块180采集的图像)的清晰度、或者锐度等指标,或者其他。以下统一称为待测眼的位置的判断。计算机1143还需自行判断待测眼是否眨眼等动作,并做相应的剔除数据处理。待计算机1143确定待测眼的位置,并驱动探头组件10的X/Y/Z三维移动控制电机,使得系统光路主光轴L1(即入待测眼光路的主光轴),对准待测眼E瞳孔中心。待计算机1143并根据待测眼E虹膜成像的清晰度、或者锐度等指标,驱动探头组件10组件的X/Y/Z三维移动控制电机,使得所述清晰度得到最佳,或者锐度达到最高。由于斜角度眼前节摄像模块相比于虹膜摄像模块,斜角度眼前节摄像模块拍摄范围更大,景深更大,但成像分辨率较虹膜摄像模块略差。故系统初始搜索虹膜或者瞳孔位置,可借助斜角度眼前节摄像模块拍摄的图像,但精确定位虹膜中心或者瞳孔中心,采用的是虹膜摄像模块。故虹膜摄像模块一并工作并采集待测眼E的虹膜图像,如含待测眼虹膜及瞳孔的图像。由斜角度眼前节摄像模块采集的图像初步定位待测眼E的工作位置后,计算机1143再根据虹膜摄像模块,精确确定测眼E的工作位置,并驱动探头组件10组件的X/Y/Z三维移动控制电机,使得系统光路主光轴L1(即入待测眼光路的主光轴),对准待测眼E瞳孔中心。待计算机1143根据待测眼E虹膜成像(虹膜摄像模块采集的图像)的清晰度、或者锐度等指标,驱动探头组件10的X/Y/Z三维移动控制电机,使得所述清晰度得到最佳,或者锐度达到最高。后续采集工作中,计算机1143需根据虹膜摄像模块采集的待测眼E虹膜图像,实时追踪待测眼的位置,并驱动探头组件10组件的X/Y/Z三维移动控制电机进行相应运动,使得系统光路主光轴L1(即入待测眼光路的主光轴),对准待测眼E瞳孔中心。计算机1143实时根据待测眼E虹膜成像(虹膜摄像模块采集的图像)的清晰度、或者锐度等指标,驱动探头组件10组件的X/Y/Z三维移动控制电机,使得所述清晰度得到最佳,或者锐度达到最高。
自动扫描检测007具体依次包括以下步骤:眼前节OCT采集、测屈光、眼后节OCT采集、快速切换眼前节OCT采集,其中在执行这些步骤的同时还同时进行居中监测006步骤。
其中,眼前节OCT采集步骤具体如下:计算机1143控制光路扫描装置1109进行扫描,控制OCT光源1101出光,组合模块18调屈控制电机运动至屈光状态基本处于0D的位置;光纤准直镜1107调光程控制电机运动至测量眼前节OCT所需样品臂光程长度的位置;屈光分光镜1401快门切换控制电机使得屈光分光镜1401切换出眼前节OCT光路;前后节电磁铁使得眼前节OCT插入镜1501插入眼前节OCT光路,如图3所示的状态。计算机1143控制眼前节OCT样品臂模块对待测眼前节进行OCT扫描,计算机1143驱动探头组件10的Z轴移动控制电机,进行Z轴方向移动(进行眼前节OCT采集的光程调节),并实时判断寻找待测眼角膜的OCT图像;待找到角膜的OCT图像后,计算机驱动探头组件10的X/Y/Z三维移动控制电机进行微调,使得角膜的OCT图像处于显示屏幕适当的位置,比如居中或者偏上,并让角膜OCT图像信号最强;当系统光路主光轴L1正对瞳孔中心,或者角膜顶点时,此时的角膜OCT图像信号往往最强。由于OCT系统其基本原理是迈克尔逊干涉仪,故计算机1143能够根据光程匹配,通过眼前节的OCT图像,精确确定角膜顶点的位置。当计算机1143控制光路扫描装置1109对眼前节进行放射线扫描时,如6线扫描。计算机1143能够根据扫描模式正交的两张眼前节OCT图像,判断眼前节OCT信号强度及确定角膜OCT信号强反光柱的位置,精确驱动探头组件10的X/Y/Z三维移动控制电机,使得系统光路主光轴L1正对瞳孔中心及角膜顶点。故上述待测眼E工作位置的判断的精度是不断提高的,由斜角度眼前节摄像模块采集的斜角度眼前节图像进行粗定位,由虹膜摄像模块采集的虹膜图像进行进一步定位,由眼前节的OCT图像进行精确定位。故可以看出斜角度眼前节摄像模块其实是起辅助作用,故其是非必须的,但添加该模块能够有利于判断待测眼的工作位置。
测屈光步骤具体如下:待上述定位好待测眼E的工作位置后,并采集好眼前节OCT图像后,计算机1143控制测屈光模块进行屈光测量。计算机1143控制光路扫描装置1109停止扫描,控制OCT光源1101出光,组合模块18调屈控制电机运动至屈光状态基本处于0D的位置;其中屈光分光镜1401由计算机1143控制,切换入屈光测量光路;光路扫描装置1109需处于设定的工作位置,使得出射光路扫描装置1109的OCT光源1101光沿图4中所示的主光轴。前后节电磁铁使得眼前节OCT插入镜1501离开屈光测量光路,如图4所示的状态。此时计算机1143根据所拍摄的眼底反光图像,从而计算出待测眼屈光度。
眼后节OCT采集具体如下:计算机1143控制光路扫描装置1109进行扫描,组合模块18调屈控制电机,运动至测屈光模块140所测得的屈光对应的屈光位置;为保持探头组件10到待测眼E的工作距离不变,当组合模块18调屈移动时,如组合模块18沿Z方向靠近待测眼E移动,则探头组件10的Z轴控制电机需要相应补偿,即控制探头组件10沿Z方向远离待测眼E移动,反之亦然;眼前节OCT插入镜1501被计算机1143控制,切换出眼后节OCT成像光路;另外屈光分光镜1401由计算机1143控制,切换出眼后节OCT成像光路,如图2所示的状态;测量眼底时,通过扫描装置11091和11093进行扫描;通过光纤准直镜1107结合样品臂光纤头(未图示)的整体平动,实现针对不同人眼眼底的光程匹配;当通过调光程模块的平动,找到眼后节OCT信号后,计算机1143控制光纤准直镜1107微调前后,使得眼后节OCT图像处于屏幕适当位置(比如居中)。此时实现对于待测眼E的光程匹配调节。接着计算机1143根据眼后节OCT信号强弱,控制接目物镜1305沿光轴平动,来针对不同人眼的屈光状态进行精确调屈,以提高眼后节OCT图像的信号强度,最终实现眼后节OCT图像的采集,从而获得视网膜厚度等人眼结构重要参数。此过程中,组合模块18调屈时,为保持探头组件10到待测眼E的工作距离不变,当组合模块18调屈移动时,如组合模块18沿Z方向靠近待测眼E移动,则探头组件10的Z轴控制电机需要相应补偿,即控制探头组件10沿Z方向远离待测眼E移动,反之亦然。若调屈行程行程较大,比如超过0.5mm,此时光纤准直镜1107需要配合进行光程补偿,使得眼后节OCT图像始终处于屏幕适当位置(比如居中)。由于眼后节OCT采集时,计算机1143能够根据眼后节OCT信号强弱来判断组合模块18的屈光状态是否调至最佳位置,故上述测屈光模块对于眼后节OCT采集不是必要的模块。但若屈光状态偏差较大时,眼后节OCT信号较弱,又会影响眼后节OCT图像的识别,而利用测屈光模块能够提高屈光调节速度及成功率。
快速切换眼前节OCT采集具体如下:屈光分光镜1401快门切换控制电机使得,屈光分光镜1401切换出眼前节OCT光路,前后节电磁铁使得眼前节OCT插入镜1501插入眼前节OCT光路,如图3所示的状态。由于上述眼后节OCT采集时,针对不同待测眼E调节了屈光度,即组合模块18进行调屈移动,而探头组件10进行相应的补偿,保持了待测眼E的工作距离不变,故此操作眼前节OCT样品臂模块150的光程发生变化;故光纤准直镜1107调光程控制电机,运动至原测量眼前节OCT所需样品臂光程长度的位置,后再根据组合模块18调屈移动量,做相应的光程补偿。如组合模块18需要靠近待测眼调屈移动,此时探头组件10需远离人眼整体移动,保持待测眼E与接目物镜1305的相对距离不变。此时眼前节OCT样品臂模块150的光程增加了,故光纤准直镜1107测眼前节OCT时,需要靠近光路扫描装置1109,以使得眼前节OCT样品臂模块150的光程保持不变,即满足测量眼前节OCT所需的样品臂光路长度;即测试待测眼E仍处于眼前节OCT采集所需的工作距离,而其光程是匹配的。计算机1143控制眼前节OCT样品臂模块150对待测眼前节进行OCT扫描,采集眼前节OCT图像;之后OCT成像模块110停止采集,系统进入数据分析阶段。由于采集了眼前节OCT图像及眼后节OCT图像,计算机1143便能够根据相应的光程匹配的数据,计算出相应的待测眼数据。故“快速切换眼前节OCT采集”这一步操作是非必须的。但本实施例中为了提高测试数据的精度,引入该步骤,从而实现眼后节OCT采集后快速实现眼前节OCT图像采集,两种模式采集间隔时间短,避免前后不同时刻测量时眼动的影响,故测得更准确的待测眼数据。
在执行完上述自动对待测眼进行测量的全部步骤后,进入数据分析阶段:待完成上述采集工作,计算机1143控制系统停止采集,并进入数据分析阶段。处理采集的眼前节OCT图像、眼后节OCT图像、眼前节摄像、屈光测量眼底图像等,获得如角膜前后表面曲率、角膜厚度、前房深度、晶状体厚度、晶状体前后表面曲率、白到白距离、瞳孔直径等众多数据。医生还能根据所采集的眼前节OCT图像、眼后节OCT图像进行形态学判断,确定待测眼E是否有相关疾病等。该多功能眼科全自动测量方法主要用于患者眼相关光学参数的自动测量,用于青少年视力及青光眼的筛查,具体能够测得角膜前后表面曲率,角膜厚度、前房深度、晶状体厚度、晶状体前后表面曲率、白到白距离、瞳孔直径、球镜度、柱镜度、轴位、前后节OCT图像、黄斑区域眼底图、ILM-RPE九区厚度图、ILM-RPE厚度地形图、ILM-RPE曲线厚度图、GCC八区厚度图、GCC厚度地形图、GCC曲线厚度图等数据或图像等众多眼科相关参数。
综上所述,本发明优选实施例的多功能眼科全自动测量方法中,首先检测设备判断待测眼是否在检测工位上;如果待测眼处于检测工位正确位置后,调整检测设备的探头相对于待测眼的位置,相对位置包括前后、左右和上下;检测设备的探头移动到正确位置后,检测设备的检测系统与待测眼自动匹配成功,待测眼进入检测状态;进入检测阶段,即自动启用检测设备的检测系统对待测眼进行自动检测,这样整个检测流程通过自动化来实现,快捷方便。具体总结如下:1)感应待测眼是否在检测工位上,通过安装在额头托上面的传感器自动感应所述待测眼上方的额头,并反馈至检测设备的控制模块(计算机)来判断待测眼是否处于检测工位上。2)电机复位,待测眼进入检测工位后需要进行电机复位,复位的电机包括左右、上下、前后、屈光、光程、偏振电机等。3)调整待测眼位置,是根据45度相机(斜角度眼前节摄像模块)拍摄的图片左右、上下移动探头,将待测眼瞳孔移动到虹膜摄像模块的成像范围内。4)在调整待测眼位置的同时进行前后调整探头位置。5)调整探头位置,瞳孔居中。6)瞳孔居中完成后,待测眼和检测设备探头都进入正确位置,待测眼进入检测状态,进入检测状态时启动居中监测流程,待测眼检测时,待测眼和检测设备都必须在正确位置上,居中监测流程的功能就是保证待测眼和检测设备探头处于正确位置上。7)进入检测阶段后,检测设备的检测系统对待测眼进行自动检测,自动检测包括前节OCT扫描、屈光测量、后节OCT扫描、快速切换前节OCT扫描,自动检测按时间顺序先后执行;执行自动检测的同时需要执行居中监测,居中监测须等到自动检测完成后方可退出。
通过本发明的多功能眼科全自动测量方法,可以同时对待测眼进行多项检测,屈光测量、前节OCT、后节OCT,一次性检测可以得到球镜度、柱镜度、轴位、角膜前后表面曲率、角膜厚度、前房深度、晶状体厚度、晶状体前后表面曲率、白到白距离、瞳孔直径等数据,并且整个检测过程完全不需要人工干预,真正做到无人值守;而且在全自动过程的每个流程中,还可以通过计算机做到智能语音播报,可以使得用户在无需任何人的帮助下对眼睛做自动检测。
以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的技术人员来说,在不脱离本发明构思的前提下,还可以做出若干等同替代或明显变型,而且性能或用途相同,都应当视为属于本发明的保护范围。
- 一种多功能眼科全自动测量方法及系统
- 一种模块化全兼容眼科检查仪器的全自动系统