随车起重机的自动收落钩控制系统与控制方法
文献发布时间:2023-06-19 09:41:38
技术领域
本发明涉及随车起重机的技术领域,特别涉及随车起重机的自动收落钩控制系统与控制方法。
背景技术
随着基础建设的发展,随车起重机广泛应用于不同场合的工程建设中,随车起重机能够根据实际需要移动到不同位置区域并对相应的起重目标物进行起重操作。由于随车起重机的工作环境通常同时存在不同的起重目标物和非起重目标物,并且起重目标物与非起重目标物之间可能非常靠近,这对随车起重机在起重目标物所处的位置进行起重钩的准确收落带来极大的挑战。现有技术都是通过人工肉眼识别的方式来控制起重钩的收落,这严重的限制起重钩收落控制的自动性和准确性以及对起重钩的收落动作带来一定的安全隐患。
发明内容
针对现有技术存在的缺陷,本发明提供随车起重机的自动收落钩控制系统与控制方法,其通过采集该随车起重机所处外部环境对应的环境图像,并对该环境图像进行识别处理,以此确定该外部环境中存在的起重目标物和非起重目标物,并根据该起重目标物和所述非起重目标物各自的形状尺寸信息和位置信息,确定对该起重目标物进行起重操作的操作空间区域,再调整该随车起重机的位姿,以使该随车起重机的起重钩局限于该操作空间区域内活动,并根据该起重目标物的形状尺寸信息,控制该起重钩的自动收落动作状态;可见,该随车起重机的自动收落钩控制系统与控制方法通过对随车起重机所处外部环境进行拍摄,并从拍摄得到的环境图像中识别得到其中存在的起重目标物和非起重目标物,再根据起重目标物和非起重目标物的形状尺寸信息和位置信息,调整随车起重机的位置和起重钩的自动收落动作状态,以保证起重钩能够操作空间区域中只针对起重目标物进行起重操作,这样能够通过图像识别的方式对随车起重机的工作环境进行有效地和准确的识别,以使控制起重钩的活动范围和收落动作,从而提高起重钩收落控制的自动性和可靠性和避免起重钩误触碰非起重目标物以保证起重钩的收落安全性。
本发明提供随车起重机的自动收落钩控制系统,其特征在于,其包括环境图像采集模块、环境图像识别处理模块、操作空间区域确定模块和起重钩收落控制模块;其中,
所述环境图像采集模块用于采集所述随车起重机所处外部环境对应的环境图像;
所述环境图像识别处理模块用于对所述环境图像进行识别处理,以此确定所述外部环境中存在的起重目标物和非起重目标物;
所述操作空间区域确定模块用于根据所述起重目标物和所述非起重目标物各自的形状尺寸信息和位置信息,确定对所述起重目标物进行起重操作的操作空间区域;
所述起重钩收落控制模块用于调整所述随车起重机的位姿,以使所述随车起重机的起重钩局限于所述操作空间区域内活动,并根据所述起重目标物的形状尺寸信息,控制所述起重钩的自动收落动作状态;
进一步,所述环境图像采集模块采集所述随车起重机所处外部环境对应的环境图像具体包括:
对所述随车起重机所处外部环境进行全景拍摄,以此获得关于所述外部环境的全景环境图像;
以及,
所述环境图像识别处理模块对所述环境图像进行识别处理,以此确定所述外部环境中存在的起重目标物和非起重目标物具体包括:
对所述全景环境图像依次进行背景噪声滤波处理和像素灰度化转换处理,从而得到灰度化的全景环境图像;
以及,
从所述灰度化的全景环境图像中提取相应的物体边缘轮廓信息,并将所述物体边缘轮廓信息与预设起重目标物边缘轮廓信息进行对比,从而将与所述预设起重目标物边缘轮廓信息相匹配的物体边缘轮廓信息对应的物体确定为起重目标物以及将与所述预设起重目标物边缘轮廓信息不匹配的物体边缘轮廓信息对应的物体确定为非起重目标物;
进一步,所述操作空间区域确定模块根据所述起重目标物和所述非起重目标物各自的形状尺寸信息和位置信息,确定对所述起重目标物进行起重操作的操作空间区域具体包括:
根据所述灰度化的全景环境图像中的物体边缘轮廓信息,确定所述起重目标物和所述非起重目标物各自的形状尺寸信息和位置信息;
并以所述位置信息包含的物体重心位置为球心和以所述尺寸信息包含的最大尺寸长度为球半径,分别确定所述起重目标物和所述非起重目标物各自对应的物体干扰球空间区域;
再将所述起重目标物对应的物体干扰球空间区域不与任何所述非起重目标物对应的物体干扰球空间区域相互重叠的空间区域作为所述操作空间区域;
进一步,所述起重钩收落控制模块调整所述随车起重机的位姿,以使所述随车起重机的起重钩局限于所述操作空间区域内活动,并根据所述起重目标物的形状尺寸信息,控制所述起重钩的自动收落动作状态具体包括:
确定所述操作空间区域对应的区域边界,并调整所述随车起重机的起重钩的六自由度位姿,以使所述起重钩的运动空间范围不超出所述区域边界;
并获取所述起重目标物的物体高度信息和所述起重钩当前的实际高度信息,并确定所述物体高度信息和所述实际高度信息之间的高度差值;
再根据所述高度差值,控制所述起重钩进行自动收落动作的收落速度和/或收落朝向。
本发明还提供随车起重机的自动收落钩控制方法,其特征在于,其包括如下步骤:
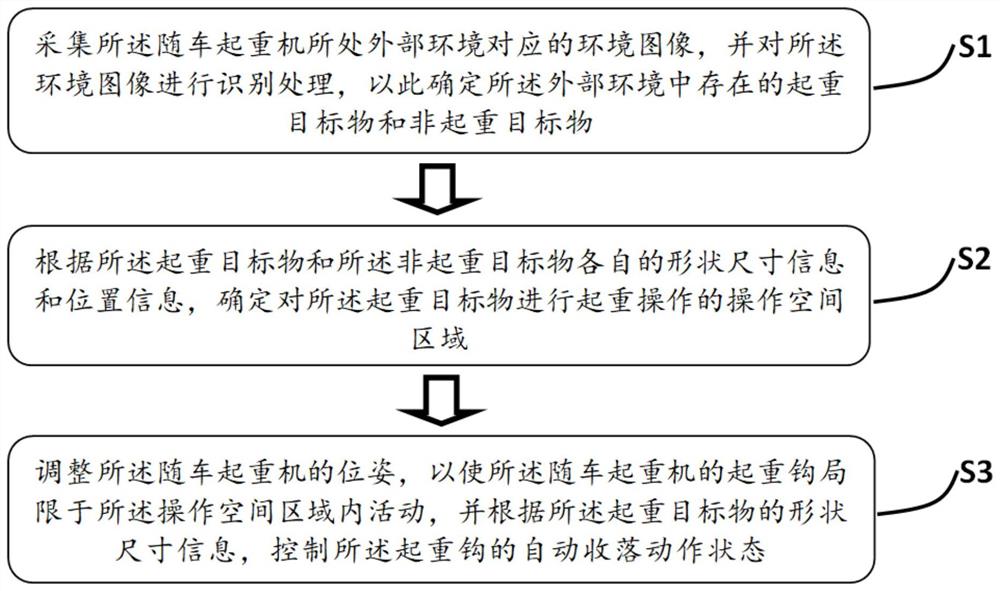
步骤S1,采集所述随车起重机所处外部环境对应的环境图像,并对所述环境图像进行识别处理,以此确定所述外部环境中存在的起重目标物和非起重目标物;
步骤S2,根据所述起重目标物和所述非起重目标物各自的形状尺寸信息和位置信息,确定对所述起重目标物进行起重操作的操作空间区域;
步骤S3,调整所述随车起重机的位姿,以使所述随车起重机的起重钩局限于所述操作空间区域内活动,并根据所述起重目标物的形状尺寸信息,控制所述起重钩的自动收落动作状态;
进一步,在所述步骤S1中,采集所述随车起重机所处外部环境对应的环境图像,并对所述环境图像进行识别处理,以此确定所述外部环境中存在的起重目标物和非起重目标物具体包括:
步骤S101,对所述随车起重机所处外部环境进行全景拍摄,以此获得关于所述外部环境的全景环境图像;
步骤S102,对所述全景环境图像依次进行背景噪声滤波处理和像素灰度化转换处理,从而得到灰度化的全景环境图像;
步骤S103,从所述灰度化的全景环境图像中提取相应的物体边缘轮廓信息,并将所述物体边缘轮廓信息与预设起重目标物边缘轮廓信息进行对比,从而将与所述预设起重目标物边缘轮廓信息相匹配的物体边缘轮廓信息对应的物体确定为起重目标物以及将与所述预设起重目标物边缘轮廓信息不匹配的物体边缘轮廓信息对应的物体确定为非起重目标物;
进一步,在所述步骤S2中,根据所述起重目标物和所述非起重目标物各自的形状尺寸信息和位置信息,确定对所述起重目标物进行起重操作的操作空间区域具体包括:
步骤S201,根据所述灰度化的全景环境图像中的物体边缘轮廓信息,确定所述起重目标物和所述非起重目标物各自的形状尺寸信息和位置信息;
步骤S202,以所述位置信息包含的物体重心位置为球心和以所述尺寸信息包含的最大尺寸长度为球半径,分别确定所述起重目标物和所述非起重目标物各自对应的物体干扰球空间区域;
步骤S203,将所述起重目标物对应的物体干扰球空间区域不与任何所述非起重目标物对应的物体干扰球空间区域相互重叠的空间区域作为所述操作空间区域;
进一步,在所述步骤S3中,调整所述随车起重机的位姿,以使所述随车起重机的起重钩局限于所述操作空间区域内活动,并根据所述起重目标物的形状尺寸信息,控制所述起重钩的自动收落动作状态具体包括:
步骤S301,确定所述操作空间区域对应的区域边界,并调整所述随车起重机的起重钩的六自由度位姿,以使所述起重钩的运动空间范围不超出所述区域边界;
步骤S302,获取所述起重目标物的物体高度信息和所述起重钩当前的实际高度信息,并确定所述物体高度信息和所述实际高度信息之间的高度差值;
步骤S303,根据所述高度差值,控制所述起重钩进行自动收落动作的收落速度和/或收落朝向;
进一步,在所述步骤S1中,采集所述随车起重机所处外部环境对应的环境图像,并对所述环境图像进行识别处理,以此确定所述外部环境中存在的起重目标物和非起重目标物具体包括:
第一、采集所述随车起重机所处外部环境对应的全景环境图像,并对所述全景环境图像进行灰度化处理,根据下面公式(1),确定灰度化处理后的全景环境图像中存在的物体与预设目标物之间的相似度值T:
在上述公式(1)中,l
第二,将所述相似度值T与预设相似度阈值进行比对,若所述相似度值T超过所述预设相似度阈值,则将对应的物体确定为起重目标物,否则,将对应的物体确定为非起重目标物;
在所述步骤S2中,根据所述起重目标物和所述非起重目标物各自的形状尺寸信息和位置信息,确定对所述起重目标物进行起重操作的操作空间区域具体包括:
根据下面公式(2),确定所述起重目标物进行起重操作的操作空间区域体积值K:
在上述公式(2)中,exp表示以自然常数e为底的指数函数,L表示所述外部环境的整体长度,H表示所述外部环境的整体高度,W表示所述外部环境的整体宽度,Max(l
在所述步骤S3中,控制所述起重钩的自动收落动作状态具体包括根据下面公式(3)确定所述起重钩的自动收落动作的收落速度和收落朝向V(θ,t):
在上述公式(3)中,K
相比于现有技术,该随车起重机的自动收落钩控制系统与控制方法通过采集该随车起重机所处外部环境对应的环境图像,并对该环境图像进行识别处理,以此确定该外部环境中存在的起重目标物和非起重目标物,并根据该起重目标物和所述非起重目标物各自的形状尺寸信息和位置信息,确定对该起重目标物进行起重操作的操作空间区域,再调整该随车起重机的位姿,以使该随车起重机的起重钩局限于该操作空间区域内活动,并根据该起重目标物的形状尺寸信息,控制该起重钩的自动收落动作状态;可见,该随车起重机的自动收落钩控制系统与控制方法通过对随车起重机所处外部环境进行拍摄,并从拍摄得到的环境图像中识别得到其中存在的起重目标物和非起重目标物,再根据起重目标物和非起重目标物的形状尺寸信息和位置信息,调整随车起重机的位置和起重钩的自动收落动作状态,以保证起重钩能够操作空间区域中只针对起重目标物进行起重操作,这样能够通过图像识别的方式对随车起重机的工作环境进行有效地和准确的识别,以使控制起重钩的活动范围和收落动作,从而提高起重钩收落控制的自动性和可靠性和避免起重钩误触碰非起重目标物以保证起重钩的收落安全性。
本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明提供的随车起重机的自动收落钩控制系统的结构示意图。
图2为本发明提供的随车起重机的自动收落钩控制方法的流程示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
参阅图1,为本发明实施例提供的随车起重机的自动收落钩控制系统的结构示意图。该随车起重机的自动收落钩控制系统包括环境图像采集模块、环境图像识别处理模块、操作空间区域确定模块和起重钩收落控制模块;其中,
该环境图像采集模块用于采集该随车起重机所处外部环境对应的环境图像;
该环境图像识别处理模块用于对该环境图像进行识别处理,以此确定该外部环境中存在的起重目标物和非起重目标物;
该操作空间区域确定模块用于根据该起重目标物和该非起重目标物各自的形状尺寸信息和位置信息,确定对该起重目标物进行起重操作的操作空间区域;
该起重钩收落控制模块用于调整该随车起重机的位姿,以使该随车起重机的起重钩局限于该操作空间区域内活动,并根据该起重目标物的形状尺寸信息,控制该起重钩的自动收落动作状态。
上述技术方案的有益效果为:该随车起重机的自动收落钩控制系统通过对随车起重机所处外部环境进行拍摄,并从拍摄得到的环境图像中识别得到其中存在的起重目标物和非起重目标物,再根据起重目标物和非起重目标物的形状尺寸信息和位置信息,调整随车起重机的位置和起重钩的自动收落动作状态,以保证起重钩能够操作空间区域中只针对起重目标物进行起重操作,这样能够通过图像识别的方式对随车起重机的工作环境进行有效地和准确的识别,以使控制起重钩的活动范围和收落动作,从而提高起重钩收落控制的自动性和可靠性和避免起重钩误触碰非起重目标物以保证起重钩的收落安全性。
优选地,该环境图像采集模块采集该随车起重机所处外部环境对应的环境图像具体包括:
对该随车起重机所处外部环境进行全景拍摄,以此获得关于该外部环境的全景环境图像;
以及,
该环境图像识别处理模块对该环境图像进行识别处理,以此确定该外部环境中存在的起重目标物和非起重目标物具体包括:
对该全景环境图像依次进行背景噪声滤波处理和像素灰度化转换处理,从而得到灰度化的全景环境图像;
以及,
从该灰度化的全景环境图像中提取相应的物体边缘轮廓信息,并将该物体边缘轮廓信息与预设起重目标物边缘轮廓信息进行对比,从而将与该预设起重目标物边缘轮廓信息相匹配的物体边缘轮廓信息对应的物体确定为起重目标物以及将与该预设起重目标物边缘轮廓信息不匹配的物体边缘轮廓信息对应的物体确定为非起重目标物。
上述技术方案的有益效果为:通过对随车起重机所处的外部环境进行全集拍摄能够全面地获得外部环境中所有物体的存在情况,而对该全景环境图像进行背景噪声滤波处理和像素灰度化转换处理,能够降低对全景环境图像进行识别的误差,由于不同物体在该全景环境图像中的物体边缘轮廓信息并不相同,这样通过将该物体边缘轮廓信息与预设起重目标物边缘轮廓信息进行匹配对照,就能够从众多物体中甄别区分出起重目标物和非起重目标物,其中,该预设起重目标物边缘轮廓信息可通过对起重目标物进行预先拍摄、并从拍摄得到的图像中提取得到,这样能够提高对起重目标物体识别的效率和准确性。
优选地,该操作空间区域确定模块根据该起重目标物和该非起重目标物各自的形状尺寸信息和位置信息,确定对该起重目标物进行起重操作的操作空间区域具体包括:
根据该灰度化的全景环境图像中的物体边缘轮廓信息,确定该起重目标物和该非起重目标物各自的形状尺寸信息和位置信息;
并以该位置信息包含的物体重心位置为球心和以该尺寸信息包含的最大尺寸长度为球半径,分别确定该起重目标物和该非起重目标物各自对应的物体干扰球空间区域;
再将该起重目标物对应的物体干扰球空间区域不与任何该非起重目标物对应的物体干扰球空间区域相互重叠的空间区域作为该操作空间区域。
上述技术方案的有益效果为:由于外界环境中不同的物体均分别占据相应体积的空间区域,而并以该位置信息包含的物体重心位置为球心和以该尺寸信息包含的最大尺寸长度为球半径能够最大限度地确定起重目标物和非起重目标物各自占据的空间区域范围,也便于对不同空间区域范围相互重叠的空间区域进行剔除,从而准确的确定该操作空间区域,以便于在该空间操作区域中任意移动起重钩也不会对非起重目标物产生干扰影响。
优选地,该起重钩收落控制模块调整该随车起重机的位姿,以使该随车起重机的起重钩局限于该操作空间区域内活动,并根据该起重目标物的形状尺寸信息,控制该起重钩的自动收落动作状态具体包括:
确定该操作空间区域对应的区域边界,并调整该随车起重机的起重钩的六自由度位姿,以使该起重钩的运动空间范围不超出该区域边界;
并获取该起重目标物的物体高度信息和该起重钩当前的实际高度信息,并确定该物体高度信息和该实际高度信息之间的高度差值;
再根据该高度差值,控制该起重钩进行自动收落动作的收落速度和/或收落朝向。
上述技术方案的有益效果为:由于该操作空间区域是不与任何非起重目标物存在相互干扰的空间区域,故通过确定该操作空间区域对应的区域边界就能够精确地确定起重钩的活动界限,从而便于控制起重钩的六自由度位姿变化;此外,根据该物体高度信息和该实际高度信息之间的高度差值,来控制该起重钩进行自动收落动作的收落速度和/或收落朝向,能够保证起重钩能够顺利地和快速地对起重目标物进行起重升降操作。
参阅图2,为本发明实施例提供的随车起重机的自动收落钩控制方法的流程示意图。该随车起重机的自动收落钩控制方法包括如下步骤:
步骤S1,采集该随车起重机所处外部环境对应的环境图像,并对该环境图像进行识别处理,以此确定该外部环境中存在的起重目标物和非起重目标物;
步骤S2,根据该起重目标物和该非起重目标物各自的形状尺寸信息和位置信息,确定对该起重目标物进行起重操作的操作空间区域;
步骤S3,调整该随车起重机的位姿,以使该随车起重机的起重钩局限于该操作空间区域内活动,并根据该起重目标物的形状尺寸信息,控制该起重钩的自动收落动作状态。
上述技术方案的有益效果为:该随车起重机的自动收落钩控制方法通过对随车起重机所处外部环境进行拍摄,并从拍摄得到的环境图像中识别得到其中存在的起重目标物和非起重目标物,再根据起重目标物和非起重目标物的形状尺寸信息和位置信息,调整随车起重机的位置和起重钩的自动收落动作状态,以保证起重钩能够操作空间区域中只针对起重目标物进行起重操作,这样能够通过图像识别的方式对随车起重机的工作环境进行有效地和准确的识别,以使控制起重钩的活动范围和收落动作,从而提高起重钩收落控制的自动性和可靠性和避免起重钩误触碰非起重目标物以保证起重钩的收落安全性。
优选地,在该步骤S1中,采集该随车起重机所处外部环境对应的环境图像,并对该环境图像进行识别处理,以此确定该外部环境中存在的起重目标物和非起重目标物具体包括:
步骤S101,对该随车起重机所处外部环境进行全景拍摄,以此获得关于该外部环境的全景环境图像;
步骤S102,对该全景环境图像依次进行背景噪声滤波处理和像素灰度化转换处理,从而得到灰度化的全景环境图像;
步骤S103,从该灰度化的全景环境图像中提取相应的物体边缘轮廓信息,并将该物体边缘轮廓信息与预设起重目标物边缘轮廓信息进行对比,从而将与该预设起重目标物边缘轮廓信息相匹配的物体边缘轮廓信息对应的物体确定为起重目标物以及将与该预设起重目标物边缘轮廓信息不匹配的物体边缘轮廓信息对应的物体确定为非起重目标物。
上述技术方案的有益效果为:通过对随车起重机所处的外部环境进行全集拍摄能够全面地获得外部环境中所有物体的存在情况,而对该全景环境图像进行背景噪声滤波处理和像素灰度化转换处理,能够降低对全景环境图像进行识别的误差,由于不同物体在该全景环境图像中的物体边缘轮廓信息并不相同,这样通过将该物体边缘轮廓信息与预设起重目标物边缘轮廓信息进行匹配对照,就能够从众多物体中甄别区分出起重目标物和非起重目标物,其中,该预设起重目标物边缘轮廓信息可通过对起重目标物进行预先拍摄、并从拍摄得到的图像中提取得到,这样能够提高对起重目标物体识别的效率和准确性。
优选地,在该步骤S2中,根据该起重目标物和该非起重目标物各自的形状尺寸信息和位置信息,确定对该起重目标物进行起重操作的操作空间区域具体包括:
步骤S201,根据该灰度化的全景环境图像中的物体边缘轮廓信息,确定该起重目标物和该非起重目标物各自的形状尺寸信息和位置信息;
步骤S202,以该位置信息包含的物体重心位置为球心和以该尺寸信息包含的最大尺寸长度为球半径,分别确定该起重目标物和该非起重目标物各自对应的物体干扰球空间区域;
步骤S203,将该起重目标物对应的物体干扰球空间区域不与任何该非起重目标物对应的物体干扰球空间区域相互重叠的空间区域作为该操作空间区域。
上述技术方案的有益效果为:由于外界环境中不同的物体均分别占据相应体积的空间区域,而并以该位置信息包含的物体重心位置为球心和以该尺寸信息包含的最大尺寸长度为球半径能够最大限度地确定起重目标物和非起重目标物各自占据的空间区域范围,也便于对不同空间区域范围相互重叠的空间区域进行剔除,从而准确的确定该操作空间区域,以便于在该空间操作区域中任意移动起重钩也不会对非起重目标物产生干扰影响。
优选地,在该步骤S3中,调整该随车起重机的位姿,以使该随车起重机的起重钩局限于该操作空间区域内活动,并根据该起重目标物的形状尺寸信息,控制该起重钩的自动收落动作状态具体包括:
步骤S301,确定该操作空间区域对应的区域边界,并调整该随车起重机的起重钩的六自由度位姿,以使该起重钩的运动空间范围不超出该区域边界;
步骤S302,获取该起重目标物的物体高度信息和该起重钩当前的实际高度信息,并确定该物体高度信息和该实际高度信息之间的高度差值;
步骤S303,根据该高度差值,控制该起重钩进行自动收落动作的收落速度和/或收落朝向。
上述技术方案的有益效果为:由于该操作空间区域是不与任何非起重目标物存在相互干扰的空间区域,故通过确定该操作空间区域对应的区域边界就能够精确地确定起重钩的活动界限,从而便于控制起重钩的六自由度位姿变化;此外,根据该物体高度信息和该实际高度信息之间的高度差值,来控制该起重钩进行自动收落动作的收落速度和/或收落朝向,能够保证起重钩能够顺利地和快速地对起重目标物进行起重升降操作。
优选地,在该步骤S1中,采集该随车起重机所处外部环境对应的环境图像,并对该环境图像进行识别处理,以此确定该外部环境中存在的起重目标物和非起重目标物具体包括:
第一、采集该随车起重机所处外部环境对应的全景环境图像,并对该全景环境图像进行灰度化处理,根据下面公式(1),确定灰度化处理后的全景环境图像中存在的物体与预设目标物之间的相似度值T:
在上述公式(1)中,l
第二,将该相似度值T与预设相似度阈值进行比对,若该相似度值T超过该预设相似度阈值,则将对应的物体确定为起重目标物,否则,将对应的物体确定为非起重目标物;
在该步骤S2中,根据该起重目标物和该非起重目标物各自的形状尺寸信息和位置信息,确定对该起重目标物进行起重操作的操作空间区域具体包括:
根据下面公式(2),确定该起重目标物进行起重操作的操作空间区域体积值K:
在上述公式(2)中,exp表示以自然常数e为底的指数函数,L表示该外部环境的整体长度,H表示该外部环境的整体高度,W表示该外部环境的整体宽度,Max(l
在该步骤S3中,控制该起重钩的自动收落动作状态具体包括根据下面公式(3)确定该起重钩的自动收落动作的收落速度和收落朝向V(θ,t):
在上述公式(3)中,K
上述技术方案的有益效果为:通过对拍摄到的环境图像识别得到其中存在的起重目标物和非起重目标物,再根据起重目标物和非起重目标物的形状尺寸信息和位置信息,确定实际可执行操作的空间,并调整随车起重机的位置和起重钩的自动收落角度和速度,以保证起重钩能够操作空间区域中只针对起重目标物进行起重操作,从而提高起重钩收落控制的自动性和可靠性及安全性。
从上述实施例的内容可知,该随车起重机的自动收落钩控制系统与控制方法通过采集该随车起重机所处外部环境对应的环境图像,并对该环境图像进行识别处理,以此确定该外部环境中存在的起重目标物和非起重目标物,并根据该起重目标物和所述非起重目标物各自的形状尺寸信息和位置信息,确定对该起重目标物进行起重操作的操作空间区域,再调整该随车起重机的位姿,以使该随车起重机的起重钩局限于该操作空间区域内活动,并根据该起重目标物的形状尺寸信息,控制该起重钩的自动收落动作状态;可见,该随车起重机的自动收落钩控制系统与控制方法通过对随车起重机所处外部环境进行拍摄,并从拍摄得到的环境图像中识别得到其中存在的起重目标物和非起重目标物,再根据起重目标物和非起重目标物的形状尺寸信息和位置信息,调整随车起重机的位置和起重钩的自动收落动作状态,以保证起重钩能够操作空间区域中只针对起重目标物进行起重操作,这样能够通过图像识别的方式对随车起重机的工作环境进行有效地和准确的识别,以使控制起重钩的活动范围和收落动作,从而提高起重钩收落控制的自动性和可靠性和避免起重钩误触碰非起重目标物以保证起重钩的收落安全性。
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
- 随车起重机的自动收落钩控制系统与控制方法
- 随车起重机自动收钩液压系统