一种定位精度高的单点定位的方法及装置
文献发布时间:2023-06-19 09:41:38
本案是以申请号为201811166734.1,申请日为2018年10月8日,名称为《一种基于分步加权最小二乘估计的单点定位的方法及装置》的专利申请为母案的分案申请。
技术领域
本发明涉及全球卫星导航系统(Global Navigation Satellite System,GNSS)单点定位领域,特别涉及一种定位精度高的单点定位的方法及装置。
背景技术
目前,单点定位普遍采用加权最小二乘估计方法(Weighted Least Square,WLS)来提高定位精度。常用的加权随机模型有基于卫星高度角的加权方法、基于伪距误差方差的加权方法等。基于卫星高度角的加权方法一定程度上能够提高定位精度,但在城市峡谷等环境中,卫星的几何分布较差,且多路径效应明显,此时,该加权方法对定位精度的提高效果不明显,在单点定位性能的改善上受到限制。基于伪距误差方差的加权方法主要是依据伪距误差方差的倒数进行权值的设定,为保证权值的准确性,需要对多历元的伪距误差方差进行处理,因此该方法的实时性受到影响,在应用上受到一定的限制。
实际应用中,顾及到车辆、船舶等用户对水平和垂直精度有不同要求,通常对水平定位精度要求高于垂直定位精度,如车道级定位导航,因此需要一种单点定位的方法及装置解决以上问题。
发明内容
本发明所要解决的技术问题是:提供一种定位精度高的单点定位的方法及装置,能够有效削弱伪距误差对单点定位的影响,提高定位精度且适用范围广。
为了解决上述技术问题,本发明采用的一种技术方案为:
一种定位精度高的单点定位的方法,包括步骤:
S1、根据卫星的位置以及接收机的位置计算当前历元中每颗卫星的高度角和方位角;
S2、根据所述每颗卫星的高度角和方位角确定当前历元中在站心坐标系中E、N、U方向上关于各颗卫星的权重矩阵;
S3、根据所述权重矩阵通过最小二乘估计方法分步估计所述接收机的位置;
S4、根据所述位置进行坐标变换,得到所述接收机的单点定位结果。
为了解决上述技术问题,本发明采用的另一种技术方案为:
一种定位精度高的单点定位的装置,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现以下步骤:
S1、根据卫星的位置以及接收机的位置计算当前历元中每颗卫星的高度角和方位角;
S2、根据所述每颗卫星的高度角和方位角确定当前历元中在站心坐标系中E、N、U方向上关于各颗卫星的权重矩阵;
S3、根据所述权重矩阵通过最小二乘估计方法分步估计所述接收机的位置;
S4、根据所述位置进行坐标变换,得到所述接收机的单点定位结果。
本发明的有益效果在于:通过每颗卫星的高度角和方位角确定当前历元中在站心坐标系中E、N、U方向上关于各颗卫星的权重矩阵,并根据所述权重矩阵通过最小二乘估计方法分步估计所述接收机的位置,根据所述位置进行坐标变换,得到所述接收机的单点定位结果,可有效削弱伪距误差对单点定位的影响,提高了单点定位的精度,且由于是逐历元解算所述接收机的位置,不仅适用于静态用户,还适用于动态用户,适用范围广且实时性强。
附图说明
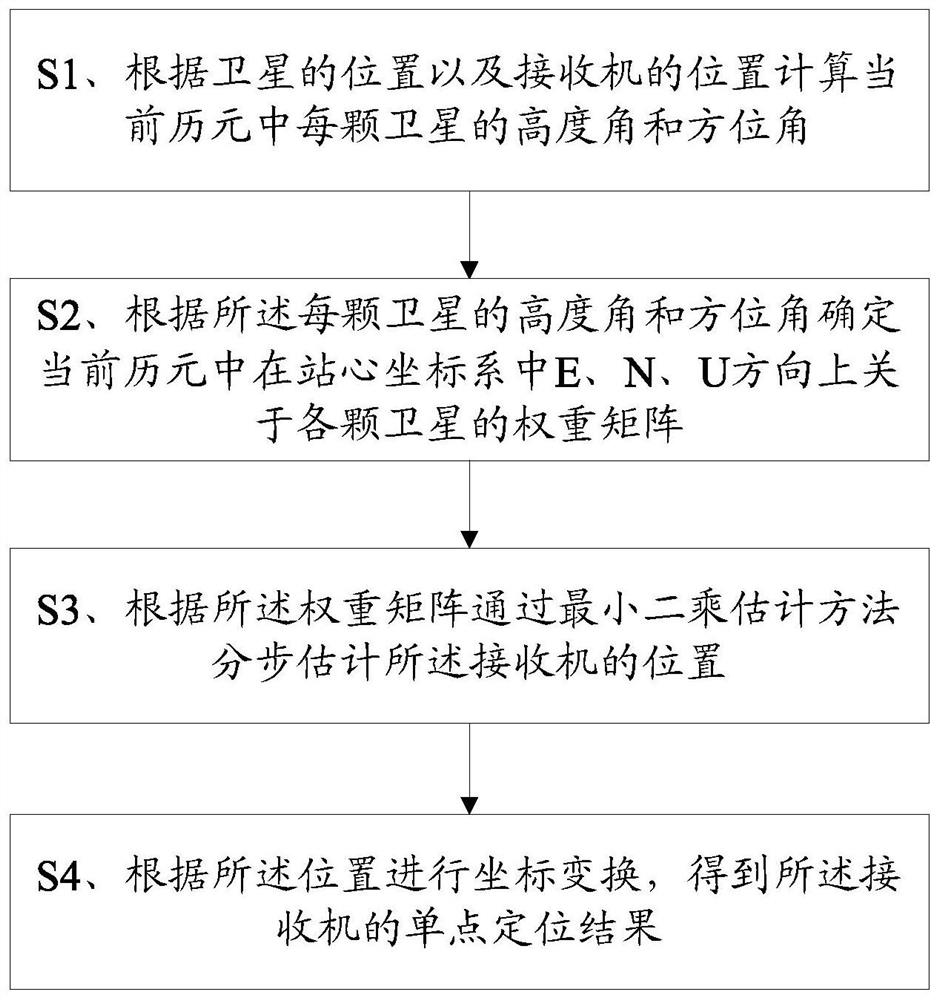
图1为本发明实施例的定位精度高的单点定位的方法流程图;
图2为本发明实施例的定位精度高的单点定位的装置的结构示意图;
图3为本发明实施例的E、N、U方向上的加权策略示意图;
图4为本发明实施例的定位精度高的单点定位的方法与最小二乘估计方法定位的精度对比;
图5为本发明实施例的定位精度高的单点定位的方法与高度角加权的最小二乘估计方法定位的精度对比;
标号说明:
1、定位精度高的单点定位的装置;2、存储器;
3、处理器。
具体实施方式
为详细说明本发明的技术内容、所实现目的及效果,以下结合实施方式并配合附图予以说明。
本发明最关键的构思在于:通过先确定当前历元中在站心坐标系中E、N、U方向上关于各颗卫星的权重矩阵,再根据权重矩阵通过最小二乘估计方法分步估计接收机的位置,并进行坐标变换,得到接收机的单点定位结果,可有效削弱伪距误差对单点定位的影响,定位精度高且适用范围广。
请参照图1,一种定位精度高的单点定位的方法,包括步骤:
S1、根据卫星的位置以及接收机的位置计算当前历元中每颗卫星的高度角和方位角;
S2、根据所述每颗卫星的高度角和方位角确定当前历元中在站心坐标系中E、N、U方向上关于各颗卫星的权重矩阵;
S3、根据所述权重矩阵通过最小二乘估计方法分步估计所述接收机的位置;
S4、根据所述位置进行坐标变换,得到所述接收机的单点定位结果。
从上述描述可知,本发明的有益效果在于:通过每颗卫星的高度角和方位角确定当前历元中在站心坐标系中E、N、U方向上关于各颗卫星的权重矩阵,并根据所述权重矩阵通过最小二乘估计方法分步估计所述接收机的位置,根据所述位置进行坐标变换,得到所述接收机的单点定位结果,可有效削弱伪距误差对单点定位的影响,提高了单点定位的精度,且由于是逐历元解算所述接收机的位置,不仅适用于静态用户,还适用于动态用户,适用范围广且实时性强。
进一步的,步骤S1包括:
S11、判断当前历元是否为第一历元,若是,则执行步骤S12,否则,执行步骤S13;
S12、根据卫星位置以及接收机位置的初始值将计算卫星的高度角和方位角;
S13、根据卫星位置和上一历元估计的接收机位置计算卫星的高度角和方位角。
由上述描述可知,通过判断当前历元是否为第一历元,并采用不同历元的接收机位置计算卫星的高度角和方位角,实时性高且保证了后续计算权重矩阵的准确性。
进一步的,步骤S2包括:
S21、根据所述每颗卫星的高度角和方位角确定当前历元中第i颗卫星在站心坐标系中E、N、U方向上的权值w
S22、根据所述E、N、U方向上各颗卫星的权值确定当前历元在E、N、U方向上关于各颗卫星的权重矩阵,所述权重矩阵如下:
W
W
W
由上述描述可知,通过确定当前历元中每颗卫星在站心坐标系中不同方向上的权值,并根据不同方向上的权值确定当前历元各颗卫星在E、N、U方向上的权重矩阵,不仅提高了定位的准确性,还可满足用户对不同方向上定位精度的需求,适用范围广。
进一步的,步骤S3包括:
S31、分步计算当前历元和上一历元的站心坐标差,计算公式如下:
ΔE
ΔE
ΔE
其中,ΔE为当前历元和上一历元的站心坐标差,ΔE
S32、根据牛顿迭代法,重复步骤S11至S31,直到
其中,e
S33、取e
由上述描述可知,通过分步计算当前历元和上一历元的站心坐标差,并在不断迭代后将e
进一步的,步骤S4包括:
根据所述接收机的站心坐标和坐标变换公式进行坐标变换,得到所述接收机的单点定位结果;
所述坐标变换公式为:
由上述描述可知,通过坐标变换公式对接收机的站心坐标进行转换,得到接收机的单点定位结果,便于使用者使用。
请参照图2,一种定位精度高的单点定位的装置,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现以下步骤:
S1、根据卫星的位置以及接收机的位置计算当前历元中每颗卫星的高度角和方位角;
S2、根据所述每颗卫星的高度角和方位角确定当前历元中在站心坐标系中E、N、U方向上关于各颗卫星的权重矩阵;
S3、根据所述权重矩阵通过最小二乘估计方法分步估计所述接收机的位置;
S4、根据所述位置进行坐标变换,得到所述接收机的单点定位结果。
从上述描述可知,本发明的有益效果在于:通过每颗卫星的高度角和方位角确定当前历元中在站心坐标系中E、N、U方向上关于各颗卫星的权重矩阵,并根据所述权重矩阵通过最小二乘估计方法分步估计所述接收机的位置,根据所述位置进行坐标变换,得到所述接收机的单点定位结果,可有效削弱伪距误差对单点定位的影响,提高了单点定位的精度,且由于是逐历元解算所述接收机的位置,不仅适用于静态用户,还适用于动态用户,适用范围广且实时性强。
进一步的,步骤S1包括:
S11、判断当前历元是否为第一历元,若是,则执行步骤S12,否则,执行步骤S13;
S12、根据卫星位置以及接收机位置的初始值将计算卫星的高度角和方位角;
S13、根据卫星位置和上一历元估计的接收机位置计算卫星的高度角和方位角。
由上述描述可知,通过判断当前历元是否为第一历元,并采用不同历元的接收机位置计算卫星的高度角和方位角,实时性高且保证了后续计算权重矩阵的准确性。
进一步的,步骤S2包括:
S21、根据所述每颗卫星的高度角和方位角确定当前历元中第i颗卫星在站心坐标系中E、N、U方向上的权值w
S22、根据所述E、N、U方向上各颗卫星的权值确定当前历元在E、N、U方向上关于各颗卫星的权重矩阵,所述权重矩阵如下:
W
W
W
由上述描述可知,通过确定当前历元中每颗卫星在站心坐标系中不同方向上的权值,并根据不同方向上的权值确定当前历元各颗卫星在E、N、U方向上的权重矩阵,不仅提高了定位的准确性,还可满足用户对不同方向上定位精度的需求,适用范围广。
进一步的,步骤S3包括:
S31、分步计算当前历元和上一历元的站心坐标差,计算公式如下:
ΔE
ΔE
ΔE
其中,ΔE为当前历元和上一历元的站心坐标差,ΔE
S32、根据牛顿迭代法,重复步骤S11至S31,直到
其中,e
S33、取e
由上述描述可知,通过分步计算当前历元和上一历元的站心坐标差,并在不断迭代后将e
进一步的,步骤S4包括:
根据所述接收机的站心坐标和坐标变换公式进行坐标变换,得到所述接收机的单点定位结果;
所述坐标变换公式为:
由上述描述可知,通过坐标变换公式对接收机的站心坐标进行转换,得到接收机的单点定位结果,便于使用者使用。
实施例一
请参照图1,一种定位精度高的单点定位的方法,包括步骤:
S1、根据卫星的位置以及接收机的位置计算当前历元中每颗卫星的高度角和方位角;
S11、判断当前历元是否为第一历元,若是,则执行步骤S12,否则,执行步骤S13;
S12、根据卫星位置以及接收机位置的初始值将计算卫星的高度角和方位角;
S13、根据卫星位置和上一历元估计的接收机位置计算卫星的高度角和方位角;
S2、根据所述每颗卫星的高度角和方位角确定当前历元中在站心坐标系中E、N、U方向上关于各颗卫星的权重矩阵;
S21、根据所述每颗卫星的高度角和方位角确定当前历元中第i颗卫星在站心坐标系中E、N、U方向上的权值w
S22、根据所述E、N、U方向上各颗卫星的权值确定当前历元在E、N、U方向上关于各颗卫星的权重矩阵,所述权重矩阵如下:
W
W
W
S3、根据所述权重矩阵通过最小二乘估计方法分步估计所述接收机的位置;
S31、分步计算当前历元和上一历元的站心坐标差,计算公式如下:
ΔE
ΔE
ΔE
其中,ΔE为当前历元和上一历元的站心坐标差,ΔE
S32、根据牛顿迭代法,重复步骤S11至S31,直到
其中,e
S33、取e
S4、根据所述位置进行坐标变换,得到所述接收机的单点定位结果;
根据所述接收机的站心坐标和坐标变换公式进行坐标变换,得到所述接收机的单点定位结果;
所述坐标变换公式为:
实施例二
本实施例将结合具体的应用场景进一步说明本发明上述的定位精度高的单点定位的方法是如何实现的:
1、基于广播星历计算当前历元中每颗卫星的位置;
2、根据卫星的位置以及接收机的位置计算当前历元中每颗卫星的高度角θ和方位角
2.1、判断当前历元是否为第一历元,若是,则执行步骤2.2,否则,执行步骤2.3;
2.2、根据卫星位置以及接收机位置的初始值将计算卫星的高度角θ和方位角
2.3、根据卫星位置和上一历元估计的接收机位置计算卫星的高度角θ和方位角
其中,
3、根据所述每颗卫星的高度角θ和方位角
一般情况下,卫星的高度角越低,观测量的质量越差,故在确定权值时应给予较小的权重,而且本发明中E、N、U方向上的权值为优选加权策略具体参见图3,图3中从左至右依次为E方向上的加权策略、N方向上的加权策略和U方向上的加权策略,其中颜色越深,给予的权重越大,在迭代解算过程中,各个方向上的权值会随着接收机位置的变化而变化;
3.1、根据所述每颗卫星的高度角θ和方位角
优选的,w
3.2、根据所述E、N、U方向上各颗卫星的权值确定当前历元在E、N、U方向上关于各颗卫星的权重矩阵,所述权重矩阵如下:
W
W
W
4、根据所述权重矩阵通过最小二乘估计方法分步估计所述接收机的位置;
4.1、分步计算当前历元和上一历元的站心坐标差,计算公式如下:
ΔE
ΔE
ΔE
其中,ΔE为当前历元和上一历元的站心坐标差,ΔE
其中G为雅可比矩阵,(I
其中(x
ρ
其中,ρ
4.2、根据牛顿迭代法,重复步骤2.1至4.1,直到
其中,e
4.3、取e
5、根据所述位置进行坐标变换,得到所述接收机的单点定位结果;
根据所述接收机的站心坐标和坐标变换公式进行坐标变换,得到所述接收机的单点定位结果;
所述坐标变换公式为:
以上述计算过程为例,在国际GNSS服务组织(International GNSS Service;IGS)下载2016年04月01日JFNG站(位于中国湖北省武汉市)24小时的数据进行实验,该站点的精确坐标(B、L、H)为(30.515565069,114.491020366,71.321573),结果表明:相较于最小二乘估计方法和高度角加权最小二乘估计方法,本发明所述方法定位精度在水平方向和垂直方向均得到提高;
由图4可知,本发明定位精度高的单点定位的方法与最小二乘估计方法定位方法相比,本发明的水平精度提高了30.9%,垂直精度提高了35.3%,三维精度提高了32.9%,具体数值如表1;
由图5可知,本发明定位精度高的单点定位的方法与高度角加权的最小二乘估计方法定位方法相比,本发明的水平精度提高了20.2%,垂直精度提高了18.2%,三维精度提高了19.3%。具体数值如表1所示:
表1三种算法精度比较
实施例三
请参照图2,一种定位精度高的单点定位的装置1,包括存储器2、处理器3及存储在存储器2上并可在处理器3上运行的计算机程序,所述处理器3执行所述程序时实现实施例一中的各个步骤。
综上所述,本发明提供的一种定位精度高的单点定位的方法及装置,通过每颗卫星的高度角和方位角确定当前历元中在站心坐标系中E、N、U方向上关于各颗卫星的权重矩阵,并根据所述权重矩阵通过最小二乘估计方法分步估计所述接收机的位置,根据所述位置进行坐标变换,得到所述接收机的单点定位结果,可有效削弱伪距误差对单点定位的影响,提高了单点定位的精度,且由于是逐历元解算所述接收机的位置,不仅适用于静态用户,还适用于动态用户,适用范围广且实时性强,通过判断当前历元是否为第一历元,并采用不同历元的接收机位置计算卫星的高度角和方位角,实时性高且保证了后续计算权重矩阵的准确性,通过确定当前历元中每颗卫星在站心坐标系中不同方向上的权值,并根据不同方向上的权值确定当前历元各颗卫星在E、N、U方向上的权重矩阵,不仅提高了定位的准确性,还可满足用户对不同方向上定位精度的需求,适用范围广,通过分步计算当前历元和上一历元的站心坐标差,并在不断迭代后取不同权重策略下各方向上的最优估值作为当前历元接收机坐标,可在保证实时性的同时不影响最终得到接收机坐标的准确性。
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等同变换,或直接或间接运用在相关的技术领域,均同理包括在本发明的专利保护范围内。
- 一种定位精度高的单点定位的方法及装置
- 一种实时相对定位与精密单点定位融合定位方法及装置