工厂生产区域目标辨识系统
文献发布时间:2023-06-19 09:43:16
技术领域
本发明涉及工厂监控领域,尤其涉及一种工厂生产区域目标辨识系统。
背景技术
工厂又称制造厂,是一类用以生产货物的大型工业建筑物。大部分工厂都拥有以大型机器或设备构成的生产线。在世界近代史中泛指资本主义机器大生产,即使用机械化劳动代替手工劳动的资本主义工业场所。18-19世纪,经过工业革命,机器在生产中广泛应用,为资本主义生产方式奠定了坚实的物质技术基础。资本主义经济凭借机器化大生产,最终战胜封建经济和小商品经济,确立了自己的统治地位。
在大众运输普及之前,工厂需要设置于工人密集之处和工业区。故早期的工厂多设于城市之中,甚至有随着工厂建设而产生城市发展的事。工厂之间亦倾向于互相集结──很多时候一所工厂的成品或废物能成为另一所工厂的原料。
后来,运河和铁路等运输网络随着工厂的繁荣而不断扩大,工厂亦开始建于就近廉价能源、原料或市场之地。运输网络完善也是工厂选址的考量之一:曾有工厂建于四野无人但交通连接方便之地,结果成功发展并获得丰厚利润。由于工厂一般会产生污染,很多工厂都改建于经专门规划的市郊地区,工人则于住宅区工厂之间通勤。
发明内容
本发明至少具有以下两个重要的发明点:
(1)替换对所有车辆的车牌号码进行同时检测的复杂运算模式,采用仅仅在方向盘景深浅于整个车辆景深时才对判断的逆行车辆的合规性进行判断的模式,从而减少了实时处理的运算量;
(2)采用云计算网元用于预先存储允许在工厂的生产区域内的道路上逆行的各个车牌号码。
根据本发明的一方面,提供了一种工厂生产区域目标辨识系统,所述系统包括:
状态鉴定设备,分别与第二分析机构和第三分析机构连接,用于在所述第三分析机构识别到方向盘成像区域时,将对应的车体目标作为顺行车体目标。
更具体地,根据本发明的工厂生产区域目标辨识系统中:
所述状态鉴定设备还用于在所述第三分析机构识别到方向盘成像区域以及所述第二参考均值大于所述第一参考均值且超过所述第一参考均值的数值大于预设景深阈值时,将对应的车体目标作为顺行车体目标。
更具体地,根据本发明的工厂生产区域目标辨识系统中,还包括:
所述状态鉴定设备还用于在所述第三分析机构识别到方向盘成像区域以及所述第二参考均值小于等于所述第一参考均值时,将对应的车体目标作为逆行车体目标;
所述状态鉴定设备还用于在所述第三分析机构识别到方向盘成像区域以及所述第二参考均值大于所述第一参考均值且超过所述第一参考均值的数值小于等于所述预设景深阈值时,将对应的车体目标作为疑似逆行车体目标;
云计算网元,用于预先存储允许在工厂的生产区域内的道路上逆行的各个车牌号码;
信号检测机构,通过网络与云计算网元连接,还与所述状态鉴定设备连接,用于对逆行车体目标对应的车牌号码是否存在于所述云计算网元存储的各个车牌号码中进行判断,当判断存在时,不将逆行车体目标对应的车牌号码作为违规车牌号码,否则,将逆行车体目标对应的车牌号码作为违规车牌号码;
监控抓拍机构,设置在工厂的生产区域内,用于对生产区域内的道路环境执行抓拍操作,以获得对应的环境抓拍图像,所述监控抓拍机构位于生产区域内的道路的驶入路口的上方;
组合滤波设备,设置在工厂的防爆箱体内,与所述监控抓拍机构连接,用于对接收到的环境抓拍图像执行组合滤波处理,以获得并输出相应的组合滤波图像;
平滑滤波设备,与所述组合滤波设备连接,用于对接收到的组合滤波图像执行边缘保持平滑滤波处理,以获得并输出相应的平滑滤波图像;
边缘锐化设备,与所述平滑滤波设备连接,用于对接收到的平滑滤波图像执行边缘锐化处理,以获得并输出相应的实时锐化图像;
第一分析机构,与所述边缘锐化设备连接,用于识别出所述实时锐化图像中的每一个车体目标,并将所述车体目标所占据的图像区域作为车体图案输出;
第二分析机构,分别与所述边缘锐化设备和所述第一分析机构连接,用于对每一个车体图案执行以下动作:识别所述车体图案的各个构成像素的各个景深值,对所述车体图案的各个构成像素的各个景深值执行均值计算以获得第一参考均值;
第三分析机构,与所述第二分析机构连接,用于对每一个车体图案执行以下动作:基于方向盘轮廓特征识别所述车体图案中方向盘成像区域,对所述方向盘成像区域的各个构成像素的各个景深值执行均值计算以获得第二参考均值。
本发明的工厂生产区域目标辨识系统设计紧凑、节省运算。由于仅仅在方向盘景深浅于整个车辆景深时才对判断的逆行车辆的合规性进行判断,从而减少了实时处理的运算量。
附图说明
以下将结合附图对本发明的实施方案进行描述,其中:
图1为根据本发明实施方案示出的工厂生产区域目标辨识系统的内部结构图。
具体实施方式
下面将参照附图对本发明的工厂生产区域目标辨识系统的实施方案进行详细说明。
云计算是分布式计算的一种,指的是通过网络“云”将巨大的数据计算处理程序分解成无数个小程序,然后,通过多部服务器组成的系统进行处理和分析这些小程序得到结果并返回给用户。云计算早期,简单地说,就是简单的分布式计算,解决任务分发,并进行计算结果的合并。因而,云计算又称为网格计算。通过这项技术,可以在很短的时间内(几秒种)完成对数以万计的数据的处理,从而达到强大的网络服务。
现阶段所说的云服务已经不单单是一种分布式计算,而是分布式计算、效用计算、负载均衡、并行计算、网络存储、热备份冗杂和虚拟化等计算机技术混合演进并跃升的结果。
“云”实质上就是一个网络,狭义上讲,云计算就是一种提供资源的网络,使用者可以随时获取“云”上的资源,按需求量使用,并且可以看成是无限扩展的,只要按使用量付费就可以,“云”就像自来水厂一样,我们可以随时接水,并且不限量,按照自己家的用水量,付费给自来水厂就可以。
从广义上说,云计算是与信息技术、软件、互联网相关的一种服务,这种计算资源共享池叫做“云”,云计算把许多计算资源集合起来,通过软件实现自动化管理,只需要很少的人参与,就能让资源被快速提供。也就是说,计算能力作为一种商品,可以在互联网上流通,就像水、电、煤气一样,可以方便地取用,且价格较为低廉。
总之,云计算不是一种全新的网络技术,而是一种全新的网络应用概念,云计算的核心概念就是以互联网为中心,在网站上提供快速且安全的云计算服务与数据存储,让每一个使用互联网的人都可以使用网络上的庞大计算资源与数据中心。
目前,由于大多数工厂的生产区域是比较重要以及比较危险的生产环境,一方面,不希望授权等级低的车辆出现在生产区域的内部道路上,避免干扰正常的生产秩序,影响工厂生产的安全性,另一方面,对于一些紧急状态,需要给重要的车辆授权较高的等级,例如允许其逆行,以提升解决事端的速度和效率,这时,如果对所有车辆同时进行逆行检测,显然运输量较大,需要一种逻辑上能够初步判断和筛选逆行车辆的机制,仅仅对筛选出来的逆行车辆进行权限验证,从而减少了实时数据处理的运算量。
为了克服上述不足,本发明搭建了一种工厂生产区域目标辨识系统,能够有效解决相应的技术问题。
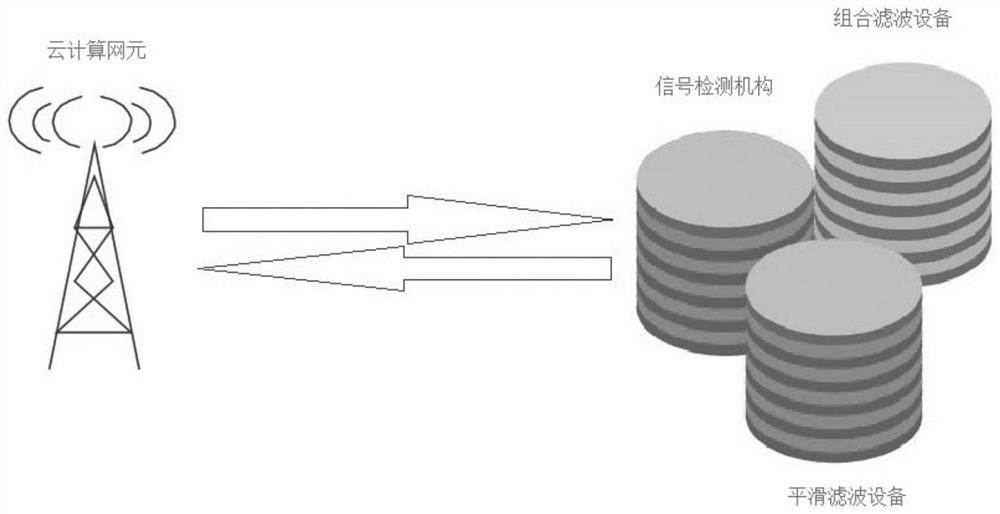
图1为根据本发明实施方案示出的工厂生产区域目标辨识系统的内部结构图,所述系统包括:
状态鉴定设备,分别与第二分析机构和第三分析机构连接,用于在所述第三分析机构识别到方向盘成像区域时,将对应的车体目标作为顺行车体目标;
所述状态鉴定设备还用于在所述第三分析机构识别到方向盘成像区域以及所述第二参考均值大于所述第一参考均值且超过所述第一参考均值的数值大于预设景深阈值时,将对应的车体目标作为顺行车体目标;
所述状态鉴定设备还用于在所述第三分析机构识别到方向盘成像区域以及所述第二参考均值小于等于所述第一参考均值时,将对应的车体目标作为逆行车体目标;
所述状态鉴定设备还用于在所述第三分析机构识别到方向盘成像区域以及所述第二参考均值大于所述第一参考均值且超过所述第一参考均值的数值小于等于所述预设景深阈值时,将对应的车体目标作为疑似逆行车体目标;
云计算网元,用于预先存储允许在工厂的生产区域内的道路上逆行的各个车牌号码;
信号检测机构,通过网络与云计算网元连接,还与所述状态鉴定设备连接,用于对逆行车体目标对应的车牌号码是否存在于所述云计算网元存储的各个车牌号码中进行判断,当判断存在时,不将逆行车体目标对应的车牌号码作为违规车牌号码,否则,将逆行车体目标对应的车牌号码作为违规车牌号码;
监控抓拍机构,设置在工厂的生产区域内,用于对生产区域内的道路环境执行抓拍操作,以获得对应的环境抓拍图像,所述监控抓拍机构位于生产区域内的道路的驶入路口的上方;
组合滤波设备,设置在工厂的防爆箱体内,与所述监控抓拍机构连接,用于对接收到的环境抓拍图像执行组合滤波处理,以获得并输出相应的组合滤波图像;
平滑滤波设备,与所述组合滤波设备连接,用于对接收到的组合滤波图像执行边缘保持平滑滤波处理,以获得并输出相应的平滑滤波图像;
边缘锐化设备,与所述平滑滤波设备连接,用于对接收到的平滑滤波图像执行边缘锐化处理,以获得并输出相应的实时锐化图像;
第一分析机构,与所述边缘锐化设备连接,用于识别出所述实时锐化图像中的每一个车体目标,并将所述车体目标所占据的图像区域作为车体图案输出;
第二分析机构,分别与所述边缘锐化设备和所述第一分析机构连接,用于对每一个车体图案执行以下动作:识别所述车体图案的各个构成像素的各个景深值,对所述车体图案的各个构成像素的各个景深值执行均值计算以获得第一参考均值;
第三分析机构,与所述第二分析机构连接,用于对每一个车体图案执行以下动作:基于方向盘轮廓特征识别所述车体图案中方向盘成像区域,对所述方向盘成像区域的各个构成像素的各个景深值执行均值计算以获得第二参考均值。
接着,继续对本发明的工厂生产区域目标辨识系统的具体结构进行进一步的说明。
在所述工厂生产区域目标辨识系统中:
所述第三分析机构识别到方向盘成像区域包括:所述第三分析机构识别的方向盘成像区域占据的像素数量大于最低数量阈值时,确定所述第三分析机构识别到方向盘成像区域。
在所述工厂生产区域目标辨识系统中:
基于方向盘轮廓特征识别所述车体图案中方向盘成像区域包括:识别到的方向盘成像区域对应的是方向盘对象的居上的一部分。
在所述工厂生产区域目标辨识系统中:
对逆行车体目标对应的车牌号码是否存在于所述云计算网元存储的各个车牌号码中进行判断包括:对逆行车体目标对应的车体图案执行OCR识别以获得对应的车牌号码。
在所述工厂生产区域目标辨识系统中,还包括:
语音播放芯片,与所述信号检测机构电性连接,用于接收并实时播放与所述违规车牌号码对应的文字信息。
在所述工厂生产区域目标辨识系统中,还包括:
ADSL通信设备,分别与所述状态鉴定设备和所述信号检测机构连接,用于将所述状态鉴定设备或所述信号检测机构的各项故障代码进行接收和上报。
在所述工厂生产区域目标辨识系统中:
所述状态鉴定设备内置有第一故障自检单元,用于对所述状态鉴定设备的内部故障进行自检和故障代码的发送。
在所述工厂生产区域目标辨识系统中:
所述信号检测机构内置有第二故障自检单元,用于对所述信号检测机构的内部故障进行自检和故障代码的发送;
其中,所述第一故障自检单元和所述第二故障自检单元分别采用不同型号的可编辑逻辑器件来实现;
其中,所述状态鉴定设备还内置有第一电量测量单元,用于测量所述状态鉴定设备的当前剩余电量;
其中,所述信号检测机构还内置有第二电量测量单元,用于测量所述信号检测机构的当前剩余电量;
其中,所述第一电量测量单元和所述第二电量测量单元共用同一石英振荡设备。
在所述工厂生产区域目标辨识系统中,还包括:
负载检测设备,用于接收所述状态鉴定设备的当前内核的利用率,所述利用率为一百分比;
数据鉴别设备,与所述负载检测设备连接,用于在所述利用率超限时,发出负载过满信号;
其中,所述数据鉴别设备还用于在接收到的利用率未超限时,发出负载充足信号。
另外,在所述工厂生产区域目标辨识系统中,ADSL是一种通过现有普通电话线为家庭、办公室提供宽带数据传输服务的技术,他能提供很高的数据传输频宽,宽到足以让电讯业大喘一口气。ADSL方案不需要改造信号传输线路,他只需要有一对特殊的MODEM,其中一个MODEM被接到用户的计算机上,另一台则安装在电信公司的通讯中心里,将它们相联的依然是普通的电话线路。在采用ADSL方案后,数据传输的速度确实提高了很多。ADSL方案的传输速度大约是ISDN方案的50倍、卫星方案的20倍,同时它又不需要改制线路,因此ADSL是目前比较可行的上网加速方案。ADSL在开发初期,是专为视像节目点播而设计的。随着互联网的迅速发展,ADSL改头换面作为一种高速接入互联网的技术出现在人们面前,让用户感到耳目一新,它使在现有互联网上提供多媒体服务成为可能。对于提供电信服务的公司来说,他们不用再为更换线路所要投入天文数字的资金而发愁,他们可以非常灵活地根据用户量配置ASDL设备,为用户提供更多的网上服务。
可以理解的是,虽然本发明已以较佳实施例披露如上,然而上述实施例并非用以限定本发明。对于任何熟悉本领域的技术人员而言,在不脱离本发明技术方案范围情况下,都可利用上述揭示的技术内容对本发明技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例。因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均仍属于本发明技术方案保护的范围内。
- 工厂生产区域目标辨识系统
- 工厂生产区域目标辨识系统