基于轨道角动量调制的多维信息探测系统
文献发布时间:2023-06-19 09:43:16
技术领域
本发明涉及激光多维信息探测技术领域,属于光学领域。
背景技术
激光探测技术广泛的应用于军事和民用各个领域,但随着科学技术的发展,单一的测距信息、测速信息已经无法满足应用的需求。例如;军事目标的探测不仅需要其距离信息,以及靠近或远离的速度,此外如果能进一步获得其旋转的速度就能对目标进行更好的判断和识别。目前的激光探测技术只能获取单一的距离信息,或单一的测速信息,或单一的旋转信息。目前多维信息还需要多个探测系统分别探测然后进行合成,比较繁琐复杂,因此以上问题亟需解决。
发明内容
本发明目的是为了解决目前多维信息还需要多个探测系统分别探测然后进行合成,比较繁琐复杂的问题,提供了一种基于轨道角动量调制的多维信息探测系统。
基于轨道角动量调制的多维信息探测系统,包括信号发生器、激光器、整形模块、空间光调制器、发射光学器、接收光学器、窄带滤光片、探测器、示波器、信号处理器;
信号发生器生成两路驱动电信号,其中,一路驱动电信号驱动激光器产生脉冲序列,该脉冲序列由n个等时间间隔T的脉冲激光信号构成,另一路驱动电信号作为起始信号被示波器采集;驱动电信号由n个等时间间隔T的脉冲驱动信号构成;n为大于或等于3的整数;
激光器产生的每个脉冲激光信号经整形模块进行光斑大小调整后,生成具有单横模高斯模式的脉冲激光信号,该具有单横模高斯模式的脉冲激光信号经过空间光调制器调制为脉冲轨道角动量激光信号,调制后的脉冲轨道角动量激光信号通过发射光学器准直照射待测目标后,经待测目标反射后的脉冲轨道角动量激光信号作为回波光信号通过接收光学器汇聚后,入射至窄带滤光片;
窄带滤光片对接收的回波光信号滤除背景噪声后,发送至探测器;探测器对接收的回波光信号进行光电探测,输出的回波电信号发送至示波器;
示波器采集接收的一路驱动电信号中的n个脉冲驱动信号的到达时间以及n个回波电信号的到达时间和强度,并将采集的所有信息发送至信号处理器;
信号处理器,用于对接收的n个脉冲驱动信号的到达时间以及n个回波电信号的到达时间和强度进行处理,获得目标的距离R、径向速度V和旋转速度Ω。
优选的是,信号处理器根据每个脉冲驱动信号及其所对应一个回波电信号间的时间差及光速c,获得目标的距离R。
优选的是,其特征在于,信号处理器根据每个脉冲驱动信号及其所对应一个回波电信号间的时间差、任意相邻的两个脉冲激光信号间的时间间隔T和光速c,获得目标的径向速度V。
优选的是,信号处理器对接收的n个回波电信号的强度进行离散傅里叶变换,获得频谱,从频谱中获得中频信号峰值对应的频率,该中频信号峰值对应的频率为中频频移Δf
优选的是,信号处理器根据每个脉冲驱动信号及其所对应一个回波电信号间的时间差及光速c,获得目标的距离R的实现方式为:
所述Δt
其中,Δt
t
t′
优选的是,信号处理器根据每个脉冲驱动信号及其所对应一个回波电信号间的时间差、任意相邻的两个脉冲激光信号间的时间间隔T和光速c,获得目标的径向速度V的实现方式为:
其中,Δt
Δt
优选的是,根据中频频移Δf
Ω=Δf
其中,l是轨道角动量阶数。
优选的是,脉冲驱动信号的脉冲宽度大于0ns且小于10ns。
优选的是,空间光调制器用于对其接收的具有单横模高斯模式的脉冲激光信号进行双量子数轨道角动量调制,获得脉冲轨道角动量激光信号。
本发明所带来的有益效果是:本发明提供了一种基于轨道角动量调制的多维信息探测系统,对脉冲激光信号进行调制,调制为脉冲轨道角动量激光信号,增加空间相位的调制信息,从而实现距离,径向速度,旋转速度的同时测量。克服了现有技术中只能获取单一的距离信息,或单一的测速信息,或单一的旋转信息,且目前多维信息探测还需要多个探测系统分别探测然后进行合成,比较繁琐复杂的问题。
本发明对于有旋转特征的目标(例如导弹,螺旋桨飞行器等等)探测具有重要意义,可以同时获取目标的多维信息,从而有助于目标的判断识别。
附图说明
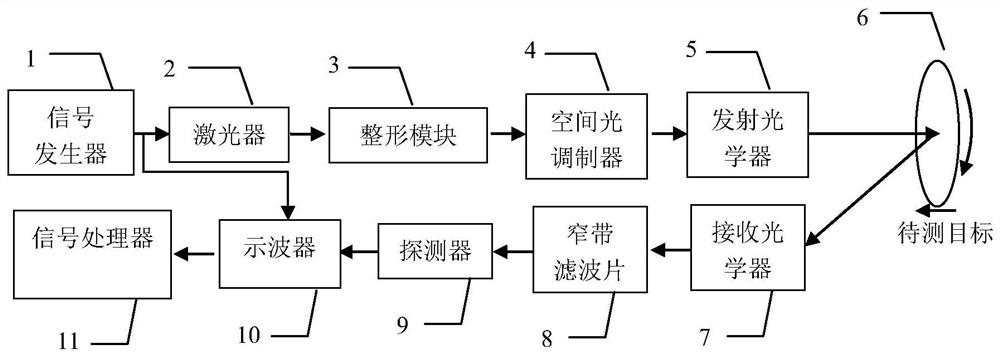
图1是本发明所述基于轨道角动量调制的多维信息探测系统的原理示意图;
图2是发射信号与回波信号之间的关系图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
参见图1说明本实施方式,本实施方式所述的基于轨道角动量调制的多维信息探测系统,包括信号发生器1、激光器2、整形模块3、空间光调制器4、发射光学器5、接收光学器7、窄带滤光片8、探测器9、示波器10、信号处理器11;
信号发生器1生成两路驱动电信号,其中,一路驱动电信号驱动激光器2产生脉冲序列,该脉冲序列由n个等时间间隔T的脉冲激光信号构成,另一路驱动电信号作为起始信号被示波器10采集;驱动电信号由n个等时间间隔T的脉冲驱动信号构成;n为大于或等于3的整数;
激光器2产生的每个脉冲激光信号经整形模块3进行光斑大小调整后,生成具有单横模高斯模式的脉冲激光信号,该具有单横模高斯模式的脉冲激光信号经过空间光调制器4调制为脉冲轨道角动量激光信号,调制后的脉冲轨道角动量激光信号通过发射光学器5准直照射待测目标6后,经待测目标6反射后的脉冲轨道角动量激光信号作为回波光信号通过接收光学器7汇聚后,入射至窄带滤光片8;
窄带滤光片8对接收的回波光信号滤除背景噪声后,发送至探测器9;探测器9对接收的回波光信号进行光电探测,输出的回波电信号发送至示波器10;
示波器10采集接收的一路驱动电信号中的n个脉冲驱动信号的到达时间以及n个回波电信号的到达时间和强度,并将采集的所有信息发送至信号处理器11;
信号处理器11,用于对接收的n个脉冲驱动信号的到达时间以及n个回波电信号的到达时间和强度进行处理,获得目标的距离R、径向速度V和旋转速度Ω。
本实施方式中,具体应用时,信号发生器1生成一路驱动电信号驱动激光器2产生脉冲序列,其中,信号发生器1生成的驱动电信号由n个等时间间隔T的脉冲驱动信号构成,激光器2产生脉冲序列由n个等时间间隔T的脉冲激光信号构成,每个脉冲驱动信号对应一个回波电信号,其中,脉冲驱动信号作为发射信号,回波电信号作为接收信号;
每次探测,探测系统发射两路驱动电信号,其中,一路驱动电信号中n个等时间间隔T的脉冲驱动信号作为初始信号到达示波器10的时间,也即发射信号时间可以表示为{t
进一步的,信号处理器11根据每个脉冲驱动信号及其所对应一个回波电信号间的时间差及光速c,获得目标的距离R。
本优选实施方式中,信号处理器11仅根据每个脉冲驱动信号及其所对应一个回波电信号间的时间差及光速c,即可获得目标的距离R,实现方式简单便于实现。
更进一步的,信号处理器11根据每个脉冲驱动信号及其所对应一个回波电信号间的时间差、任意相邻的两个脉冲激光信号间的时间间隔T和光速c,获得目标的径向速度V。
本优选实施方式中,信号处理器11仅根据每个脉冲驱动信号及其所对应一个回波电信号间的时间差、任意相邻的两个脉冲激光信号间的时间间隔T和光速c,即可获得目标的径向速度V,实现方式简单便于实现。
更进一步的,具体参见图2,信号处理器11对接收的n个回波电信号的强度进行离散傅里叶变换,获得频谱,从频谱中获得中频信号峰值对应的频率,该中频信号峰值对应的频率为中频频移Δf
本优选实施方式中,信号处理器11对接收的n个回波电信号进行离散傅里叶变换从而求取目标的旋转速度Ω,而目前未见距离、速度、旋转速度多维信息同时测量的文献,原因就是窄脉冲测距机理和连续波傅里叶变换测速相矛盾,而本优选实施方式对接收的n个回波电信号进行离散傅里叶变换,获得频谱,从频谱中获得中频信号峰值对应的频率,即:中频频移Δf
更进一步的,信号处理器11根据每个脉冲驱动信号及其所对应一个回波电信号间的时间差及光速c,获得目标的距离R的实现方式为:
所述Δt
其中,Δt
t
t′
其中,Δt
Δt
本优选实施方式中,目标的径向速度V,还可通过
更进一步的,根据中频频移Δf
Ω=Δf
其中,l是轨道角动量阶数。
更进一步的,脉冲驱动信号的脉冲宽度大于0ns且小于10ns。
本优选实施方式中,为了保证测距和测速精度,故脉冲驱动信号的脉冲宽度要求小于10ns。
更进一步的,空间光调制器4用于对其接收的具有单横模高斯模式的脉冲激光信号进行双量子数轨道角动量调制,获得脉冲轨道角动量激光信号。
本优选实施方式中,双量子轨道角动量调制的优势可以提高调制光束的鲁棒性,减弱大气湍流等因素的干扰,提高旋转速度的测量精度。
虽然在本文中参照了特定的实施方式来描述本发明,但是应该理解的是,这些实施例仅仅是本发明的原理和应用的示例。因此应该理解的是,可以对示例性的实施例进行许多修改,并且可以设计出其他的布置,只要不偏离所附权利要求所限定的本发明的精神和范围。应该理解的是,可以通过不同于原始权利要求所描述的方式来结合不同的从属权利要求和本文中所述的特征。还可以理解的是,结合单独实施例所描述的特征可以使用在其他所述实施例中。
- 基于轨道角动量调制的多维信息探测系统
- 基于广义互信息的多维信号调制电路的设计方法及其应用