一种智能化工业用摩擦焊接设备
文献发布时间:2023-06-19 09:44:49
技术领域
本发明涉及一种摩擦焊接设备,更具体的说是一种智能化工业用摩擦焊接设备。
背景技术
在摩擦焊接设备使用时,经常需要让旋转体快速停止旋转,以便实现焊接,但是市面上没有教好的摩擦焊接设备,所以设计了这种智能化工业用摩擦焊接设备。
发明内容
本发明主要解决的技术问题是提供一种智能化工业用摩擦焊接设备,设备能够将两个需要焊接的圆柱固定在同一高度,设备能够给一个圆柱压力并使另一个圆柱旋转且向设备中心运动,设备能够使两个圆柱在焊接之后快速同时同向旋转实现焊接之后的快速冷却,设备能够将两个圆柱的焊缝打磨平整。
为解决上述技术问题,本发明涉及一种摩擦焊接设备,更具体的说是一种智能化工业用摩擦焊接设备,包括摩擦联动机构、同向旋转机构、固定机构,设备能够将两个需要焊接的圆柱固定在同一高度,设备能够给一个圆柱压力并使另一个圆柱旋转且向设备中心运动,设备能够使两个圆柱在焊接之后快速同时同向旋转实现焊接之后的快速冷却,设备能够将两个圆柱的焊缝打磨平整。
摩擦联动机构与同向旋转机构连接,同向旋转机构与固定机构连接,固定机构与摩擦联动机构连接。
作为本技术方案的进一步优化,本发明一种智能化工业用摩擦焊接设备,所述的摩擦联动机构包括电机、电机轴、摩擦轮a、压迫带、限位板a、限位板 b、拉簧、压迫带限位轴、限位轴连接板、摩擦轮b、连接轴a、皮带a、连接轴 b、摩擦轮c、皮带b、连接轴c、摩擦轮d、皮带c、连接轴d、皮带d、连接轴 e、摩擦轮e、连接轴f、摩擦条、摩擦限位槽、连接板a、连接柱、球轴、球轴轴承、三角压迫板、连接板b、三角连接板、连接板c、连接板d、连接板e、连接板f、连接板g、连接板h、焊接轴a、焊接轴b,电机与电机轴连接,电机与连接板g连接,电机轴与摩擦轮a连接,电机轴与摩擦轮b连接,电机轴与皮带b摩擦连接,电机轴与连接板b轴承连接,电机轴与连接板h轴承连接,摩擦轮a与压迫带摩擦连接,压迫带一端与连接板f连接,另一端与连接板f 滑动连接,压迫带与限位板a滑动连接,压迫带与压迫带限位轴滑动连接,限位板a与连接板f连接,限位板b与压迫带连接,拉簧一端与压迫带连接另一端与连接板e连接,压迫带限位轴与限位轴连接板连接,限位轴连接板与两侧的连接板d连接,摩擦轮b与皮带a摩擦连接,连接轴a与皮带a摩擦连接,连接轴a与两侧的连接板d轴承连接,皮带a与连接轴b摩擦连接,连接轴b 与摩擦轮c连接,连接轴b与两侧的连接板d轴承连接,摩擦轮c与焊接轴a 摩擦连接,皮带b与连接轴c摩擦连接,连接轴c与摩擦轮d连接,连接轴c 与连接板h轴承连接,皮带c与连接轴d摩擦连接,连接轴d与皮带d摩擦连接,连接轴d与连接板c轴承连接,皮带d与连接轴e摩擦连接,皮带d与摩擦轮e摩擦连接,连接轴e与连接板c轴承连接,摩擦轮e与连接轴f连接,连接轴f与连接板e轴承连接,连接板d与连接板e连接,连接板d与连接板f 连接,连接板d与连接板g连接,连接板d与连接板h连接,焊接轴a与焊接轴b放置在三角连接板上压迫带之下。
作为本技术方案的进一步优化,本发明一种智能化工业用摩擦焊接设备,所述的同向旋转机构包括电机a、电机轴a、齿轮、传动轴a、摩擦轮a、摩擦轮b、皮带一、传动轴b、摩擦轮c、安装板a、安装板b、轴承、滑动限位板、同向轴、摩擦轮d、风扇摩擦轮、风扇轴、风扇、反向轴,电机a与电机轴a连接,电机a与一侧的连接板b连接,电机轴a与一个齿轮连接,两个齿轮相啮合,一个齿轮与传动轴a连接,传动轴a与摩擦轮a连接,传动轴a与皮带一摩擦连接,传动轴a与连接板b轴承连接,摩擦轮a与摩擦轮b摩擦连接,摩擦轮b与反向轴连接,皮带一与传动轴b摩擦连接,皮带一与风扇摩擦轮摩擦连接,传动轴b与摩擦轮c连接,传动轴b与连接板b轴承连接,摩擦轮c与安装板a摩擦连接,安装板a与安装板b连接,安装板a与滑动限位板连接,安装板a与连接板f滑动连接,安装板b与轴承连接,轴承与同向轴轴承连接,同向轴与摩擦轮d连接,风扇摩擦轮与风扇轴连接,风扇轴与风扇连接。
作为本技术方案的进一步优化,本发明一种智能化工业用摩擦焊接设备,所述的固定机构包括联动皮带a、联动轴a、联动连接板a、联动连接板b、联动连接板c、联动连接板d、联动连接板e、联动限位轴、联动限位弹簧、联动皮带b、联动轴b、反向摩擦轮a、反向摩擦轮b、联动轴c、联动皮带c、联动轴d、滑动板a、滑动板b、滑动板c、滑动架,联动皮带a一端与联动轴a摩擦连接,另一端与电机轴摩擦连接,联动连接板a与联动轴a轴承连接,联动连接板a与连接板b连接,联动连接板b与联动轴a摩擦连接,联动连接板b 与联动连接板c连接,联动连接板b与联动连接板d连接,联动连接板b与一侧的连接板d滑动连接,联动连接板c与联动限位轴滑动连接,联动连接板e 与联动限位轴连接,联动限位轴与一侧的连接板d滑动连接,联动限位弹簧套在联动限位轴上且限位于联动连接板c与联动连接板e,联动皮带b一端与电机轴摩擦连接,另一端与联动轴b摩擦连接,联动轴b与反向摩擦轮a连接,联动轴b与连接板b轴承连接,反向摩擦轮a与反向摩擦轮b摩擦连接,反向摩擦轮b与联动轴c连接,联动轴c与联动皮带c摩擦连接,联动轴c与滑动架轴承连接,联动皮带c与联动轴d摩擦连接,联动轴d与滑动板a摩擦连接,联动轴d与滑动架轴承连接,滑动板a与滑动板c连接,滑动板a与一侧的连接板d滑动连接,滑动板b与滑动板c连接,滑动架与一侧的连接板d连接。
作为本技术方案的进一步优化,本发明一种智能化工业用摩擦焊接设备,所述的压迫带材质为可弯折橡胶。
作为本技术方案的进一步优化,本发明一种智能化工业用摩擦焊接设备,所述的联动连接板e靠近设备中心的一侧表面镀有金刚砂能够用于金属打磨。
本发明一种智能化工业用摩擦焊接设备的有益效果为:
本发明一种智能化工业用摩擦焊接设备,设备能够将两个需要焊接的圆柱固定在同一高度,设备能够给一个圆柱压力并使另一个圆柱旋转且向设备中心运动,设备能够使两个圆柱在焊接之后快速同时同向旋转实现焊接之后的快速冷却,设备能够将两个圆柱的焊缝打磨平整。
附图说明
下面结合附图和具体实施方法对本发明做进一步详细的说明。
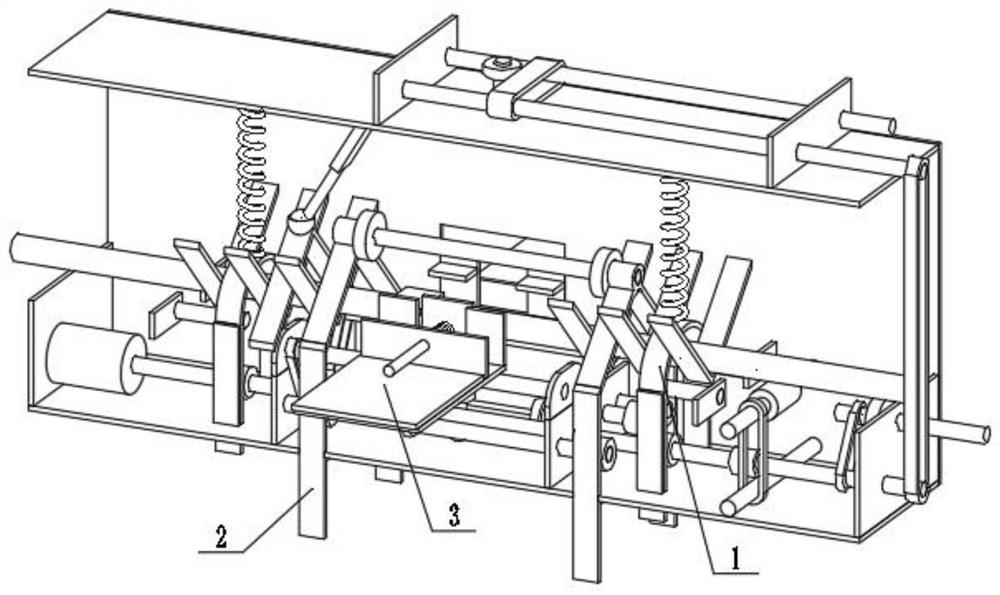
图1为本发明一种智能化工业用摩擦焊接设备的结构示意图一。
图2为本发明一种智能化工业用摩擦焊接设备的结构示意图二。
图3为本发明一种智能化工业用摩擦焊接设备的摩擦联动机构1的结构示意图一。
图4为本发明一种智能化工业用摩擦焊接设备的摩擦联动机构1的结构示意图二。
图5为本发明一种智能化工业用摩擦焊接设备的摩擦联动机构1的结构示意图三。
图6为本发明一种智能化工业用摩擦焊接设备的摩擦联动机构1的结构示意图四。
图7为本发明一种智能化工业用摩擦焊接设备的摩擦联动机构1的结构示意图五。
图8为本发明一种智能化工业用摩擦焊接设备的同向旋转机构2的结构示意图一。
图9为本发明一种智能化工业用摩擦焊接设备的同向旋转机构2的结构示意图二。
图10为本发明一种智能化工业用摩擦焊接设备的同向旋转机构2的结构示意图三。
图11为本发明一种智能化工业用摩擦焊接设备的固定机构3的结构示意图一。
图12为本发明一种智能化工业用摩擦焊接设备的固定机构3的结构示意图二。
图13为本发明一种智能化工业用摩擦焊接设备的固定机构3的结构示意图三。
图14为本发明一种智能化工业用摩擦焊接设备的固定机构3的结构示意图四。
图15为本发明一种智能化工业用摩擦焊接设备的滑动架3-20的结构示意图。
图中:摩擦联动机构1;电机1-1;电机轴1-2;摩擦轮a1-3;压迫带1-4;限位板a1-5;限位板b1-6;拉簧1-7;压迫带限位轴1-8;限位轴连接板1-9;摩擦轮b1-10;连接轴a1-11;皮带a1-12;连接轴b1-13;摩擦轮c1-14;皮带 b1-15;连接轴c1-16;摩擦轮d1-17;皮带c1-18;连接轴d1-19;皮带d1-20;连接轴e1-21;摩擦轮e1-22;连接轴f1-23;摩擦条1-24;摩擦限位槽1-25;连接板a1-26;连接柱1-27;球轴1-28;球轴轴承1-29;三角压迫板1-30;连接板b1-31;三角连接板1-32;连接板c1-33;连接板d1-34;连接板e1-35;连接板f1-36;连接板g1-37;连接板h1-38;焊接轴a1-39;焊接轴b1-40;同向旋转机构2;电机a2-1;电机轴a2-2;齿轮2-3;传动轴a2-4;摩擦轮a2-5;摩擦轮b2-6;皮带一2-7;传动轴b2-8;摩擦轮c2-9;安装板a2-10;安装板 b2-11;轴承2-12;滑动限位板2-13;同向轴2-14;摩擦轮d2-15;风扇摩擦轮2-16;风扇轴2-17;风扇2-18;反向轴2-19;固定机构3;联动皮带a3-1;联动轴a3-2;联动连接板a3-3;联动连接板b3-4;联动连接板c3-5;联动连接板d3-6;联动连接板e3-7;联动限位轴3-8;联动限位弹簧3-9;联动皮带 b3-10;联动轴b3-11;反向摩擦轮a3-12;反向摩擦轮b3-13;联动轴c3-14;联动皮带c3-15;联动轴d3-16;滑动板a3-17;滑动板b3-18;滑动板c3-19;滑动架3-20。
具体实施方式
具体实施方式一:
下面结合图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图11、图12、图13、图14、图15说明本实施方式,本发明涉及一种摩擦焊接设备,更具体的说是一种智能化工业用摩擦焊接设备,包括取样机构1、防撞箱体机构2、调节机构3、夹紧机构4,设备能够将两个需要焊接的圆柱固定在同一高度,设备能够给一个圆柱压力并使另一个圆柱旋转且向设备中心运动,设备能够使两个圆柱在焊接之后快速同时同向旋转实现焊接之后的快速冷却,设备能够将两个圆柱的焊缝打磨平整。
取样机构1设置在防撞箱体机构2的内部,调节机构3位于防撞箱体机构2 的上方,夹紧机构4位于调节机构3的上方。
具体实施方式二:
1.下面结合图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图 11、图12、图13、图14、图15说明本实施方式,本实施方式对实施方式一作进一步说明,所述的摩擦联动机构1包括电机1-1、电机轴1-2、摩擦轮a1-3、压迫带1-4、限位板a1-5、限位板b1-6、拉簧1-7、压迫带限位轴1-8、限位轴连接板1-9、摩擦轮b1-10、连接轴a1-11、皮带a1-12、连接轴b1-13、摩擦轮 c1-14、皮带b1-15、连接轴c1-16、摩擦轮d1-17、皮带c1-18、连接轴d1-19、皮带d1-20、连接轴e1-21、摩擦轮e1-22、连接轴f1-23、摩擦条1-24、摩擦限位槽1-25、连接板a1-26、连接柱1-27、球轴1-28、球轴轴承1-29、三角压迫板1-30、连接板b1-31、三角连接板1-32、连接板c1-33、连接板d1-34、连接板e1-35、连接板f1-36、连接板g1-37、连接板h1-38、焊接轴a1-39、焊接轴b1-40,电机1-1与电机轴1-2连接,电机1-1与连接板g1-37连接,电机轴 1-2与摩擦轮a1-3连接,电机轴1-2与摩擦轮b1-10连接,电机轴1-2与皮带 b1-15摩擦连接,电机轴1-2与连接板b1-31轴承连接,电机轴1-2与连接板 h1-38轴承连接,摩擦轮a1-3与压迫带1-4摩擦连接,压迫带1-4一端与连接板f1-36连接,另一端与连接板f1-36滑动连接,压迫带1-4与限位板a1-5滑动连接,压迫带1-4与压迫带限位轴1-8滑动连接,限位板a1-5与连接板f1-36 连接,限位板b1-6与压迫带1-4连接,拉簧1-7一端与压迫带1-4连接另一端与连接板e1-35连接,压迫带限位轴1-8与限位轴连接板1-9连接,限位轴连接板1-9与两侧的连接板d1-34连接,摩擦轮b1-10与皮带a1-12摩擦连接,连接轴a1-11与皮带a1-12摩擦连接,连接轴a1-11与两侧的连接板d1-34轴承连接,皮带a1-12与连接轴b1-13摩擦连接,连接轴b1-13与摩擦轮c1-14 连接,连接轴b1-13与两侧的连接板d1-34轴承连接,摩擦轮c1-14与焊接轴a1-39摩擦连接,皮带b1-15与连接轴c1-16摩擦连接,连接轴c1-16与摩擦轮 d1-17连接,连接轴c1-16与连接板h1-38轴承连接,皮带c1-18与连接轴d1-19 摩擦连接,连接轴d1-19与皮带d1-20摩擦连接,连接轴d1-19与连接板c1-33 轴承连接,皮带d1-20与连接轴e1-21摩擦连接,皮带d1-20与摩擦轮e1-22 摩擦连接,连接轴e1-21与连接板c1-33轴承连接,摩擦轮e1-22与连接轴f1-23 连接,连接轴f1-23与连接板e1-35轴承连接,连接板d1-34与连接板e1-35 连接,连接板d1-34与连接板f1-36连接,连接板d1-34与连接板g1-37连接,连接板d1-34与连接板h1-38连接,焊接轴a1-39与焊接轴b1-40放置在三角连接板1-32上压迫带1-4之下,设备能够将两个需要焊接的圆柱固定在同一高度,将焊接轴a1-39与焊接轴b1-40分别放置在设备两侧的三角连接板1-32上,电机1-1工作,电机1-1工作带动电机轴1-2顺时针旋转,电机轴1-2旋转带动摩擦轮a1-3旋转,摩擦轮a1-3旋转在限位板a1-5的限制下带动一侧的压迫带1-4向下运动,压迫带1-4在拉簧1-7的作用下可以自动复位,一侧向下运动的两个压迫带1-4压迫焊接轴a1-39与焊接轴b1-40,并在三角连接板1-32 的作用下使两个需要焊接的圆柱焊接轴a1-39与焊接轴b1-40固定在同一高度。
具体实施方式三:
下面结合图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图11、图12、图13、图14、图15说明本实施方式,本实施方式对实施方式一作进一步说明,所述的同向旋转机构2包括电机a2-1、电机轴a2-2、齿轮2-3、传动轴a2-4、摩擦轮a2-5、摩擦轮b2-6、皮带一2-7、传动轴b2-8、摩擦轮 c2-9、安装板a2-10、安装板b2-11、轴承2-12、滑动限位板2-13、同向轴2-14、摩擦轮d2-15、风扇摩擦轮2-16、风扇轴2-17、风扇2-18、反向轴2-19,电机 a2-1与电机轴a2-2连接,电机a2-1与一侧的连接板b1-31连接,电机轴a2-2 与一个齿轮2-3连接,两个齿轮2-3相啮合,一个齿轮2-3与传动轴a2-4连接,传动轴a2-4与摩擦轮a2-5连接,传动轴a2-4与皮带一2-7摩擦连接,传动轴 a2-4与连接板b1-31轴承连接,摩擦轮a2-5与摩擦轮b2-6摩擦连接,摩擦轮 b2-6与反向轴2-19连接,皮带一2-7与传动轴b2-8摩擦连接,皮带一2-7与风扇摩擦轮2-16摩擦连接,传动轴b2-8与摩擦轮c2-9连接,传动轴b2-8与连接板b1-31轴承连接,摩擦轮c2-9与安装板a2-10摩擦连接,安装板a2-10 与安装板b2-11连接,安装板a2-10与滑动限位板2-13连接,安装板a2-10与连接板f1-36滑动连接,安装板b2-11与轴承2-12连接,轴承2-12与同向轴 2-14轴承连接,同向轴2-14与摩擦轮d2-15连接,风扇摩擦轮2-16与风扇轴 2-17连接,风扇轴2-17与风扇2-18连接,设备能够给一个圆柱压力并使另一个圆柱旋转且向设备中心运动,设备能够使两个圆柱在焊接之后快速同时同向旋转实现焊接之后的快速冷却,电机1-1工作带动电机轴1-2顺时针旋转,电机轴1-2旋转带动摩擦轮b1-10旋转,摩擦轮b1-10旋转通过皮带a1-12的侧向力带动连接轴a1-11与连接轴b1-13旋转,连接轴b1-13旋转时带动摩擦轮 c1-14旋转,此时摩擦轮c1-14逆时针旋转,摩擦轮c1-14旋转带动焊接轴a1-39 向焊接轴b1-40方向运动,并持续在接触到焊接轴b1-40后持续向焊接轴b1-40 施加一个压力,电机轴1-2旋转时还通过皮带b1-15带动连接轴c1-16旋转,连接轴c1-16旋转并通过摩擦轮d1-17带动焊接轴a1-39旋转,焊接轴a1-39 在压迫带1-4的压迫下保持相对高度稳定,在电机轴1-2旋转时还通过皮带 c1-18带动连接轴d1-19旋转,连接轴d1-19旋转通过皮带d1-20带动连接轴 e1-21旋转,皮带d1-20跟随运动时带动摩擦轮e1-22旋转,摩擦轮e1-22旋转通过连接轴f1-23带动另一个摩擦轮e1-22旋转,此时两个摩擦轮e1-22逆时针旋转,下侧的摩擦轮e1-22旋转带动摩擦条1-24向连接板a1-26方向滑动,摩擦条1-24滑动通过连接板a1-26与连接柱1-27带动球轴1-28向下运动,球轴1-28在球轴轴承1-29内滑动,并通过球轴轴承1-29向下压迫三角压迫板 1-30,三角压迫板1-30在三角连接板1-32的限制下压迫焊接轴b1-40,使焊接轴b1-40保持相对位置稳定,并不会跟随焊接轴a1-39旋转,在焊接轴b1-40 高速旋转的过程中与焊接轴a1-39摩擦产生的热量是焊接轴a1-39与焊接轴 b1-40接触面融化,此时电机a2-1工作,电机a2-1工作带动电机轴a2-2顺时针旋转,电机轴a2-2旋转通过两个齿轮2-3带动传动轴a2-4旋转,传动轴a2-4 旋转通过皮带一2-7带动传动轴b2-8旋转,传动轴b2-8旋转带动摩擦轮c2-9 旋转,传动轴a2-4旋转时还通过摩擦轮a2-5与摩擦轮b2-6带动反向轴2-19 旋转,此时摩擦轮c2-9与摩擦轮b2-6旋转方向相反,即在摩擦轮b2-6与摩擦轮c2-9旋转时向下带动安装板a2-10运动,安装板a2-10运动通过安装板b2-11 带动轴承2-12运动,轴承2-12运动通过同向轴2-14带动两个摩擦轮d2-15旋转,两个摩擦轮d2-15向下运动至快与焊接轴a1-39、焊接轴b1-40接触时,电机1-1停止旋转,摩擦轮d2-15继续运动至别分与焊接轴a1-39、焊接轴b1-40 接触,在摩擦轮d2-15的压迫下焊接轴a1-39、焊接轴b1-40同时同向旋转,即焊接轴a1-39、焊接轴b1-40之间的焊点的熔池在此时能够固化。
具体实施方式四:
下面结合图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图11、图12、图13、图14、图15说明本实施方式,本实施方式对实施方式一作进一步说明,所述的固定机构3包括联动皮带a3-1、联动轴a3-2、联动连接板a3-3、联动连接板b3-4、联动连接板c3-5、联动连接板d3-6、联动连接板 e3-7、联动限位轴3-8、联动限位弹簧3-9、联动皮带b3-10、联动轴b3-11、反向摩擦轮a3-12、反向摩擦轮b3-13、联动轴c3-14、联动皮带c3-15、联动轴d3-16、滑动板a3-17、滑动板b3-18、滑动板c3-19、滑动架3-20,联动皮带a3-1一端与联动轴a3-2摩擦连接,另一端与电机轴1-2摩擦连接,联动连接板a3-3与联动轴a3-2轴承连接,联动连接板a3-3与连接板b1-31连接,联动连接板b3-4与联动轴a3-2摩擦连接,联动连接板b3-4与联动连接板c3-5 连接,联动连接板b3-4与联动连接板d3-6连接,联动连接板b3-4与一侧的连接板d1-34滑动连接,联动连接板c3-5与联动限位轴3-8滑动连接,联动连接板e3-7与联动限位轴3-8连接,联动限位轴3-8与一侧的连接板d1-34滑动连接,联动限位弹簧3-9套在联动限位轴3-8上且限位于联动连接板c3-5与联动连接板e3-7,联动皮带b3-10一端与电机轴1-2摩擦连接,另一端与联动轴b3-11 摩擦连接,联动轴b3-11与反向摩擦轮a3-12连接,联动轴b3-11与连接板b1-31 轴承连接,反向摩擦轮a3-12与反向摩擦轮b3-13摩擦连接,反向摩擦轮b3-13 与联动轴c3-14连接,联动轴c3-14与联动皮带c3-15摩擦连接,联动轴c3-14 与滑动架3-20轴承连接,联动皮带c3-15与联动轴d3-16摩擦连接,联动轴d3-16 与滑动板a3-17摩擦连接,联动轴d3-16与滑动架3-20轴承连接,滑动板a3-17 与滑动板c3-19连接,滑动板a3-17与一侧的连接板d1-34滑动连接,滑动板 b3-18与滑动板c3-19连接,滑动架3-20与一侧的连接板d1-34连接,设备能够将两个圆柱的焊缝打磨平整,电机1-1工作,电机1-1工作带动电机轴1-2 逆时针旋转,电机轴1-2旋转通过联动皮带a3-1带动联动轴a3-2旋转,联动轴a3-2旋转带动联动连接板b3-4在一侧连接板d1-34的限制下向设备中心运动,联动连接板b3-4运动通过联动连接板c3-5带动联动限位轴3-8向运动,联动限位轴3-8在联动限位弹簧3-9的作用下推动联动连接板e3-7向设备中心运动,此时焊接轴a1-39与焊接轴b1-40处于旋转状态,联动连接板e3-7运动至焊接轴a1-39与焊接轴b1-40的焊缝处时将焊缝进行打磨,当联动连接板b3-4 带动联动连接板d3-6运动至于焊接轴a1-39与焊接轴b1-40接触时,联动连接板e3-7将焊接轴a1-39与焊接轴b1-40的焊缝打磨平整,电机轴1-2旋转时还通过联动皮带b3-10带动联动轴b3-11旋转,联动轴b3-11旋转通过反向摩擦轮a3-12与反向摩擦轮b3-13带动联动轴c3-14旋转,联动轴c3-14旋转通过联动皮带c3-15带动联动轴d3-16旋转,联动轴d3-16旋转带动滑动板a3-17 在一侧连接板d1-34的限制下向设备中心运动,滑动板a3-17运动通过滑动板 c3-19带动滑动板b3-18运动,当滑动板b3-18运动至与联动连接板d3-6接触时,滑动板b3-18与滑动板c3-19限制了打磨中的焊接轴a1-39的焊接轴b1-40相对位置,进一步的助益了焊接轴a1-39与焊接轴b1-40的焊缝打磨。
具体实施方式五:
下面结合图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图11、图12、图13、图14、图15说明本实施方式,本实施方式对实施方式一作进一步说明,所述的压迫带1-4材质为可弯折橡胶。
具体实施方式六:
下面结合图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图11、图12、图13、图14、图15说明本实施方式,本实施方式对实施方式一作进一步说明,所述的联动连接板e3-7靠近设备中心的一侧表面镀有金刚砂能够用于金属打磨。
本设备的工作原理是:设备能够将两个需要焊接的圆柱固定在同一高度,将焊接轴a1-39与焊接轴b1-40分别放置在设备两侧的三角连接板1-32上,电机1-1工作,电机1-1工作带动电机轴1-2顺时针旋转,电机轴1-2旋转带动摩擦轮a1-3旋转,摩擦轮a1-3旋转在限位板a1-5的限制下带动一侧的压迫带 1-4向下运动,压迫带1-4在拉簧1-7的作用下可以自动复位,一侧向下运动的两个压迫带1-4压迫焊接轴a1-39与焊接轴b1-40,并在三角连接板1-32的作用下使两个需要焊接的圆柱焊接轴a1-39与焊接轴b1-40固定在同一高度,设备能够给一个圆柱压力并使另一个圆柱旋转且向设备中心运动,设备能够使两个圆柱在焊接之后快速同时同向旋转实现焊接之后的快速冷却,电机1-1工作带动电机轴1-2顺时针旋转,电机轴1-2旋转带动摩擦轮b1-10旋转,摩擦轮 b1-10旋转通过皮带a1-12的侧向力带动连接轴a1-11与连接轴b1-13旋转,连接轴b1-13旋转时带动摩擦轮c1-14旋转,此时摩擦轮c1-14逆时针旋转,摩擦轮c1-14旋转带动焊接轴a1-39向焊接轴b1-40方向运动,并持续在接触到焊接轴b1-40后持续向焊接轴b1-40施加一个压力,电机轴1-2旋转时还通过皮带b1-15带动连接轴c1-16旋转,连接轴c1-16旋转并通过摩擦轮d1-17带动焊接轴a1-39旋转,焊接轴a1-39在压迫带1-4的压迫下保持相对高度稳定,在电机轴1-2旋转时还通过皮带c1-18带动连接轴d1-19旋转,连接轴d1-19 旋转通过皮带d1-20带动连接轴e1-21旋转,皮带d1-20跟随运动时带动摩擦轮e1-22旋转,摩擦轮e1-22旋转通过连接轴f1-23带动另一个摩擦轮e1-22 旋转,此时两个摩擦轮e1-22逆时针旋转,下侧的摩擦轮e1-22旋转带动摩擦条1-24向连接板a1-26方向滑动,摩擦条1-24滑动通过连接板a1-26与连接柱1-27带动球轴1-28向下运动,球轴1-28在球轴轴承1-29内滑动,并通过球轴轴承1-29向下压迫三角压迫板1-30,三角压迫板1-30在三角连接板1-32 的限制下压迫焊接轴b1-40,使焊接轴b1-40保持相对位置稳定,并不会跟随焊接轴a1-39旋转,在焊接轴b1-40高速旋转的过程中与焊接轴a1-39摩擦产生的热量是焊接轴a1-39与焊接轴b1-40接触面融化,此时电机a2-1工作,电机a2-1工作带动电机轴a2-2顺时针旋转,电机轴a2-2旋转通过两个齿轮2-3带动传动轴a2-4旋转,传动轴a2-4旋转通过皮带一2-7带动传动轴b2-8旋转,传动轴b2-8旋转带动摩擦轮c2-9旋转,传动轴a2-4旋转时还通过摩擦轮a2-5 与摩擦轮b2-6带动反向轴2-19旋转,此时摩擦轮c2-9与摩擦轮b2-6旋转方向相反,即在摩擦轮b2-6与摩擦轮c2-9旋转时向下带动安装板a2-10运动,安装板a2-10运动通过安装板b2-11带动轴承2-12运动,轴承2-12运动通过同向轴2-14带动两个摩擦轮d2-15旋转,两个摩擦轮d2-15向下运动至快与焊接轴a1-39、焊接轴b1-40接触时,电机1-1停止旋转,摩擦轮d2-15继续运动至别分与焊接轴a1-39、焊接轴b1-40接触,在摩擦轮d2-15的压迫下焊接轴 a1-39、焊接轴b1-40同时同向旋转,即焊接轴a1-39、焊接轴b1-40之间的焊点的熔池在此时能够固化,设备能够将两个圆柱的焊缝打磨平整,电机1-1工作,电机1-1工作带动电机轴1-2逆时针旋转,电机轴1-2旋转通过联动皮带a3-1带动联动轴a3-2旋转,联动轴a3-2旋转带动联动连接板b3-4在一侧连接板d1-34的限制下向设备中心运动,联动连接板b3-4运动通过联动连接板c3-5 带动联动限位轴3-8向运动,联动限位轴3-8在联动限位弹簧3-9的作用下推动联动连接板e3-7向设备中心运动,此时焊接轴a1-39与焊接轴b1-40处于旋转状态,联动连接板e3-7运动至焊接轴a1-39与焊接轴b1-40的焊缝处时将焊缝进行打磨,当联动连接板b3-4带动联动连接板d3-6运动至于焊接轴a1-39 与焊接轴b1-40接触时,联动连接板e3-7将焊接轴a1-39与焊接轴b1-40的焊缝打磨平整,电机轴1-2旋转时还通过联动皮带b3-10带动联动轴b3-11旋转,联动轴b3-11旋转通过反向摩擦轮a3-12与反向摩擦轮b3-13带动联动轴c3-14 旋转,联动轴c3-14旋转通过联动皮带c3-15带动联动轴d3-16旋转,联动轴 d3-16旋转带动滑动板a3-17在一侧连接板d1-34的限制下向设备中心运动,滑动板a3-17运动通过滑动板c3-19带动滑动板b3-18运动,当滑动板b3-18运动至与联动连接板d3-6接触时,滑动板b3-18与滑动板c3-19限制了打磨中的焊接轴a1-39的焊接轴b1-40相对位置,进一步的助益了焊接轴a1-39与焊接轴b1-40的焊缝打磨。
当然,上述说明并非对本发明的限制,本发明也不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也属于本发明的保护范围。
- 一种智能化工业用摩擦焊接设备
- 用于汽车尾翼生产的摩擦焊接设备的摩擦上模