一种机器人外部参考坐标系下的直线运动规划方法
文献发布时间:2023-06-19 09:46:20
技术领域
本发明涉及一种机器人运动轨迹规划方法,具体说是一种机器人外部参考坐标系下的直线运动规划方法。
背景技术
通常情况下,机器人笛卡尔空间轨迹规划所参考的坐标系为世界坐标系或用户坐标系。机器人笛卡尔空间的轨迹规划一般都是规划机器人TCP(工具中心点)的位姿,机器人TCP在空间中相对于世界坐标系是规则的直线或圆弧轨迹。机器人工作时,工具安装在机器人末端,工件固定在机器人可达工作空间内,机器人在工件上根据不同应用需求进行作业。但对于有些应用,比如涂胶应用需要将工件安装在机器人末端,工件相对于某一个固定胶枪运动。无论工件的姿态如何变化,工件相对于固定胶枪的运动轨迹始终为工件的直线或圆弧轮廓,此时机器人TCP在世界坐标系下是一条不直观的空间曲线轨迹,无法直接对其进行轨迹规划。对于涂胶这类应用,需要相对于外部某一个固定的参考坐标系进行运动规划,工件位置和姿态的运动均相对于外部参考坐标系。
世界坐标系或用户坐标系下姿态规划是相对于世界坐标系的,这种规划方式,当示教起点和示教终点工件姿态发生变化时,若要保证工件的直线轮廓沿着外部参考坐标系(胶枪)运动,需要示教多个中间点去拟合工件轮廓。示教中间点越多,拟合效果越好,但是增加了示教的复杂和难度,且无法保证涂胶速度的均匀变化。而外部参考坐标系下的姿态规划是相对于外部参考坐标系的,在外部参考坐标系下运动规划,无论工件的起终点姿态如何变化,直线运动只需要示教起点和终点,示教作业得以简化。示教轨迹再现时,机器人手持的工件也会相对外部参考坐标系运动,保证了速度的均匀性。如图1所示。
机器人的直线运动是最基本的轨迹运动,在外部固定的参考坐标系下实现直线运动可以拓展机器人的应用领域,比如上述的涂胶应用。文献《一种基于动态外部TCP的工业机器人磨抛方法[J]》(李名水,李霆,欧道江,等.机电产品开发与创新,2018,31(2):20-23),通过提取工件曲面特征信息自动生成动态外部TCP点,再根据轨迹离散点与动态外部TCP的位姿转换关系求得机器人最终的运行轨迹,文中提到的外部TCP,其本质是一个外部参考坐标系,但文献未详细说明如何在外部参考坐标系下规划直线的方法。
发明内容
本发明的发明目的在于,克服现有技术存在的缺陷,提出了一种机器人外部参考坐标系下的直线运动规划方法,基于绕外部参考坐标系原点反转工件的思想以及利用虚拟的外部参考坐标系来规划位姿,将一种复杂的运动分解为平移和旋转运动的叠加,分别规划位置和姿态,再由位置和姿态合成目标运动,在外部固定的参考坐标系下实现直线规划,从而实现工件相对于外部参考坐标系的直线运动。
本发明的基本技术思路是:
将工件的运动分解为直线运动和旋转运动。直线运动指工件保持与示教起点姿态不变,沿外部参考坐标系et1原点平移至示教终点处工件与外部参考坐标系原点接触位置的中间点,此过程外部参考坐标系et1不变,机器人的TCP点由示教起点t1变换至中间点t2'。旋转运动指在中间点处工件绕着外部参考坐标系原点旋转至与示教终点相同姿态的位置,此过程中机器人的TCP点由中间点t2'变换至示教终点t2,外部参考坐标系的原点位置不变但其姿态随着工件的旋转发生变化,当工件旋转至示教终点时,外部参考坐标系由et1变换至et2。et2是一个虚拟的外部参考坐标系,没有实际意义,只为了插补计算的引入。外部参考坐标系下直线运动的起点、终点均由示教获得。已知条件:示教起点机器人的TCP点t1相对于外部参考坐标系et1的位姿描述表示为
本发明机器人外部参考坐标系下的直线运动规划方法,其步骤如下:
步骤1.反转变换进行运动分解
在示教终点处将机器人姿态绕着外部参考坐标系et1原点反转至与示教起点相同姿态的中间点,此时机器人TCP点t2反转至t2'点,反转消除了机器人的姿态变化;反转后,机器人在中间点和示教起点只有位置的变化;示教终点处引入虚拟外部参考坐标系et2,et2与外部参考坐标系et1原点重合,当示教终点机器人姿态绕着外部参考坐标系et1原点反转至与示教起点相同姿态的中间点后,et2与et1重合。
步骤2.确定姿态插补起终点
由刚体的运动特性得
其中,
步骤3.确定位置插补起终点
直线位置插补起点为t1在外部参考坐标系et1下的位置描述
步骤4.计算姿态和位置插补中间点
分别对姿态和位置进行插补,姿态和位置插补均相对于外部参考坐标系et1;对et2相对于et1的变化姿态进行插补得到姿态插补中间点的姿态
步骤5.运动合成计算TCP位姿
姿态插补中间点外部参考坐标系在世界坐标系下的姿态描述
本发明根据外部参考坐标下直线运动的几何特性,基于反转工件的思想以及利用虚拟的外部参考坐标系来规划位姿的方法,将空间中不直观的曲线运动分解为两个简单运动的叠加,分别规划这两个简单的运动,再由两个简单的运动合成为所要实现的目标曲线运动,从而实现工件相对于外部参考坐标系的直线运动。本发明规划方法实现简单,应用本发明方法可以实现外部参考坐标系下的直线运动,扩展机器人的应用领域。
附图说明
图1是外部参考坐标系和世界坐标系下直线运动示教与再现的区别。其中,a图是世界坐标系下的示教,图中标记,1为工件,2为胶枪;b图是外部参考坐标系下的示教。
图2是外部参考坐标系下直线运动分解过程。
图3是外部参考坐标系下直线运动插补示意与放大图。
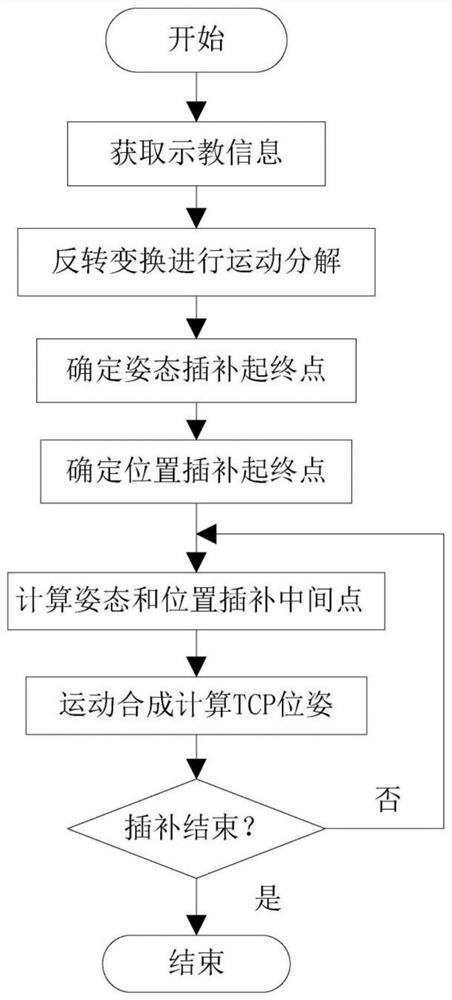
图4是外部参考坐标系下直线插补流程图。
图5位置插补点各方向分量。其中,图a是位置插补X与Y方向位置图,图b是位置插补X与Z方向位置图。
图6 TCP点在世界坐标系下的位置分量。其中,图a是TCP点在世界坐标系X与Y方向分量图,图b是TCP点在世界坐标系X与Z方向分量图
图7 TCP点在世界坐标系下的姿态变化。其中,图a是TCP点在世界坐标系下的姿态α变化图,图b是TCP点在世界坐标系下的姿态β变化图,图c是TCP点在世界坐标系下的姿态γ变化图。
具体实施方式
下面结合具体实施例,对本发明方法作进一步详细说明。
本发明以某通用六关节机器人为控制对象,将需要涂胶的工件固定在机器人末端手爪上,胶枪相对于地面固定在机器人的工作空间内。机器人手持工件在胶枪的作用下进行涂胶作业,如附图1。在胶枪处建立外部参考坐标系,外部参考坐标系下直线运动的示教起点为P1,终点为P2。示教时将需要进行涂胶的工件的直线轮廓紧贴外部参考坐标系的原点。
如附图2所示,外部参考坐标系et1相对于世界坐标系的描述由控制器的坐标系标定获得,已知建立的外部参考坐标系et1相对于世界坐标系的位姿描述表示为
示教起点P1处机器人TCP点t1相对于外部参考坐标系et1的位姿描述表示为
要实现外部参考坐标系下的直线运动,思路是将工件的运动分解为直线运动和旋转运动,如附图2所示。直线运动指工件保持与示教起点姿态不变,沿外部参考坐标系et1原点平移至示教终点处工件与外部参考坐标系原点接触位置的中间点,此过程外部参考坐标系et1不变,机器人的TCP点由示教起点t1变换至中间点t2'。旋转运动指在中间点处工件绕着外部参考坐标系原点旋转至与示教终点相同姿态的位置,此过程中机器人的TCP点由中间点t2'变换至示教终点t2,外部参考坐标系的原点位置不变但其姿态随着工件的旋转发生变化,当工件旋转至示教终点时,外部参考坐标系由et1变换至et2。et2是一个虚拟的外部参考坐标系,没有实际意义,只为了插补计算的引入。
本发明的具体步骤如下,流程图见附图4。
步骤1.反转变换进行运动分解
在示教终点处将机器人姿态绕着外部参考坐标系et1原点反转至与示教起点相同姿态的中间点,此时机器人TCP点t2反转至t2'点,反转消除了机器人的姿态变化;反转后,机器人在中间点和示教起点只有位置的变化;示教终点处引入虚拟外部参考坐标系et2,et2与外部参考坐标系et1原点重合,当示教终点机器人姿态绕着外部参考坐标系et1原点反转至与示教起点相同姿态的中间点后,et2与et1重合。
步骤2.确定姿态插补起终点
由刚体的运动特性得
步骤3.确定位置插补起终点
直线位置插补起点为t1在外部参考坐标系et1下的位置描述
步骤4.计算姿态和位置插补中间点
如附图3,分别对姿态和位置进行插补,姿态和位置插补均相对于外部参考坐标系et1;对et2相对于et1的变化姿态进行插补得到姿态插补中间点的姿态
步骤5.运动合成计算TCP位姿
姿态插补中间点外部参考坐标系在世界坐标系下的姿态描述
- 一种机器人外部参考坐标系下的直线运动规划方法
- 一种机器人外部参考坐标系下的直线运动规划方法