一种高点视频监控拥堵事件检测方法
文献发布时间:2023-06-19 09:47:53
技术领域
本发明涉及交通拥堵事件检测领域,特别是一种高点视频监控拥堵事件检测方法。
背景技术
随着中国城市快速发展,越来越多的人口向城市聚集,城市人口快速增长。由于人们生活水平提高,私家车保有量告诉增长,城市交通状况越来越糟糕,交通拥堵成为城市交通顽疾。这样的情况在区域中心城市更加的突出。而在交通拥堵事件背后隐含的事件,是什么原因导致的交通拥堵,如何更快的解决交通拥堵,如何采取有力措施预防交通拥堵,是目前城市发展必须要重视的问题。
导致交通拥堵的原因有很多:红绿灯信号设置不合理,车辆引流不合理高峰期大量车辆涌入,交通事故或者车辆抛锚导致道路不通畅。为了及时解决这些问题,及时快速的发现交通拥堵事件是首先要解决的问题。
目前交警部分有专人负责交通状况巡检,目的就是为了及时发现交通拥堵事件。但是碍于人力不足,难以应付众多的路段。一个区域中心城市,上千个路口,却只有不到10人在轮询监控。一天之内只能覆盖不到20%的重点路段。而现实中,天网工程的建设已经很完善,重点路段,路口都有摄像头监控。如何充分利用视频监控,利用图像技术实时的感知交通拥堵事件,及时上报是解决以上问题的关键。
在众多的监控摄像头中,假设高度在几十米的高点视频监控对拥堵事件的检测具备以下两点的明显优势:大视野(一个摄像头可以覆盖多个路段区域),具备大全局观(一个设摄像头可以覆盖一条路的完整路段,相比于假设高度在5~8米的低点摄像头,具备更好的全局观,对一个完整路段的拥堵情况的把握更加准确)。利用好高点监控摄像头,用于交通拥堵事件检测,是更加准确(大全局观),性价比更高(大视野)的交通拥堵事件检测解决方案。
高点视频检测场景具备:大视野和大全局观两个显著的特点。但是其缺点也很明显:目标小,难以做目标检测,基于检测跟踪技术难以满足工程化应用。
因此,如何充分利用高点视频视频监控,利用图像技术实时的感知交通拥堵事件,及时上报是解决以上问题的关键。
发明内容
本发明的目的是要解决现有技术中存在的不足,提供一种高点视频监控拥堵事件检测方法。
为达到上述目的,本发明是按照以下技术方案实施的:
一种高点视频监控拥堵事件检测方法,利用固定架设高度在几十米的高点监控摄像头拍摄的视频进行交通拥堵检测,包括以下步骤:
S1、人工标定监控摄像头拍摄的视频中的一帧图像的需要检测跟踪的道路ROI区域,并将ROI区域分割成若干分段ROI区域;
S2、基于传统的背景建模和前景检测技术和帧间差分方法检测ROI区域中的静止前景目标像素和运动前景目标像素,所述目标像素为车辆;
S3、计算单帧图像内的静止前景目标像素和运动前景目标像素的空间占有率;
S4、设定连续多帧图像为一个采样周期,计算采样周期内的静止车辆目标和运动车辆目标的空间占有率,并对采样周期内拥堵状态进行判断;
S5、长时域空间拥堵统计分析和判定。
进一步地,所述S1中ROI区域分割的具体步骤包括:
S11、所述人工标注ROI区域为多个点围城的任意形状的多边形,取任意多边形ROI区域的每个边的中心点;
S12、找到距离最远的两个中心点,并以此两点连成一条线段L;
S13、将这条线段L平均拆分成N等分,并计算出N-1个点,并通过这N-1个点做垂直于线段L的N-1条直线;
S14、通过S13所述的N-1条直线,计算N-1条直线和ROI区域边缘的交点,将完整的ROI分成近乎均分的N份分段ROI区域。
进一步地,所述S3具体包括:
S31、计算单帧图像内分段ROI区域的静止前景目标像素和运动前景目标像素的空间占有率:
分别计算每个分段ROI区域的静止前景目标像素和运动前景目标像素的空间占有率,针对每个分段ROI区域的静止前景目标像素和运动前景目标像素的空间占有率设定阈值,当该分段ROI区域的区域的静止前景目标像素和运动前景目标像素的空间占有率大于设定的阈值时,认定该分段ROI区域的静止前景目标像素和运动前景目标像素的空间占有率分别为1,即得到处理后的每个分段ROI区域的静止前景目标像素和运动前景目标像素的空间占有率;
S32、通过平滑处理计算出完整ROI区域的静止前景目标像素和运动前景目标像素的空间占有率:
如果一个分段ROI区域的前后两个分段ROI区域的静止前景目标像素或运动前景目标像素的空间占有率都是1,则该分段ROI区域的静止前景目标像素和运动前景目标像素的空间占有率均为1。
进一步地,所述S4的具体步骤如下:
S41、波动异常判定
对于一个采样周期连续N帧画面计算出静止车辆目标和运动车辆目标的空间占有率组成的N维向量[spr1~sprn],空间占有率变化梯度计算公式:
设置一个梯度变化的阈值grad_thresh,当求得的空间占有率梯度grad>grad_thresh时,即判断发生异常波动;
S42、采样周期空间占有率计算
当通过异常波动判定模块,确定没有异常波动后,分别对一个采样周期连续N帧画面计算出静止车辆目标和运动车辆目标的空间占有率组成的N维向量[spr1~sprn],通过平滑处理和向上取均值处理,计算采样周期内静止车辆目标和运动车辆目标的空间占有率,采用均值滤波的方式进行平滑处理,均值滤波公式为:
经过平滑处理后的空间占有率[sprm1~sprmn],经过向上取均值的方式求采样周期内静止车辆目标和运动车辆目标的空间占有率,向上取均值计算公式:
如式(3)所示,经过平滑处理后的空间占有率[sprm1~sprmn],求其平均值avg(sprm1~sprmn),然后对[sprm1~sprmn]中所有大于均值的元素求均值,得到采样周期内静止车辆目标和运动车辆目标的空间占有率;
S43、采样周期拥堵判定
针对计算得到的静止车辆目标的空间占有率sprs,配置两个阈值sprs_min和sprs_max,其中sprs_max>sprs_min,针对计算得到的运动车辆目标空间占有率sprm,配置两个阈值sprm_min和sprm_max,通过公式(4)所示的判定逻辑判断采样周期内是否发生了拥堵事件;
sprs>sprs_max||sprm>sprm_max||(sprs>sprs_min&&sprm>sprm_min) (4)。
进一步地,所述S5的具体步骤为:
将多个采样周期组成一个长时间域,在长时间域内,通过求拥堵时间占总时间的比例即拥堵事件占空比,以及拥堵和非拥堵状态之间的跳变频率来衡量一个拥堵事件的严重程度,拥堵事件占空比越大同时跳变频率越低,拥堵就越严重。
优选地,所述S4中采样周期的时长为1-2s。
优选地,所述步骤S5中,还包括将拥堵事定义为“1”高电平,非拥堵定义为“0”低电平,得到在1和0之间高低电平跳变的矩形波,其中高电平的占空比越大,拥堵越严重。
与现有技术相比,本发明针对架设高度在几十米的高点监控摄像头,利用人工标定监控摄像头拍摄的视频中的一帧图像的需要检测跟踪的道路ROI区域,并将ROI区域分割成若干分段ROI区域;基于传统的背景建模和前景检测技术和帧间差分方法检测ROI区域中的静止前景目标像素和运动前景目标像素,所述目标像素为车辆;计算单帧图像内的静止前景目标像素和运动前景目标像素的空间占有率;设定连续多帧图像为一个采样周期,计算采样周期内的静止车辆目标和运动车辆目标的空间占有率,并对采样周期内拥堵状态进行判断;最后进行长时域空间拥堵统计分析和判定拥堵事件。
本发明可以做到交通拥堵事件的自动检测,并自动识别拥堵的严重程度,可以取代人工巡检,实现自动化巡检,及时的发现拥堵事件,快速提醒,使得可以快速采取措施解决交通拥堵问题。
附图说明
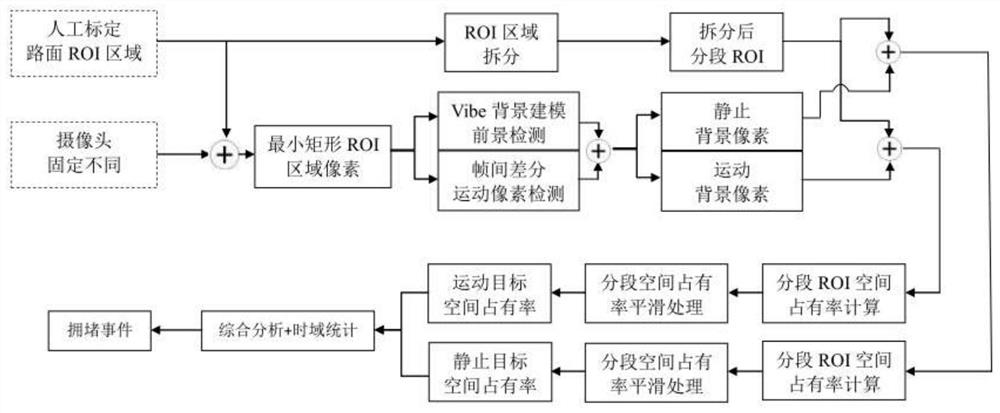
图1为高点视频监控拥堵事件检测方法流程图。
图2为人工标注ROI区域效果图。
图3为ROI区域拆分流程图。
图4为ROI区域拆分处理示意图。
图5为基于传统的背景建模和前景检测技术和帧间差分方法的静止前景目标像素和运动前景目标像素的检测流程图。
图6为分段ROI区域的空间占有率计算流程。
图7为分段ROI区域的空间占有率平滑处理示意图。
图8为长时域空间内拥堵事件分析示意图。
具体实施方式
为使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步的详细说明。此处所描述的具体实施例仅用于解释本发明,并不用于限定发明。
如图1所示,本实施例的一种高点视频监控拥堵事件检测方法,利用固定架设高度在几十米的高点监控摄像头拍摄的视频进行交通拥堵检测,包括以下步骤:
S1、人工标定监控摄像头拍摄的视频中的一帧图像的需要检测跟踪的道路ROI区域,如果简单的计算车辆目标像素占据整个路面区域像素的百分比,计算出的结果无法真实反映车辆在路面上的分布情况,因此将ROI区域分割成若干分段ROI区域,如图3、图4所示:
S11、所述人工标注ROI区域为多个点围城的任意形状的多边形,适用于直行路段和轻微弯曲的路段,如图2所示,以轻微弯曲的路段为例,如图取任意多边形ROI区域的每个边的中心点;
S12、找到距离最远的两个中心点,并以此两点连成一条线段L;
S13、将这条线段L平均拆分成N等分,并计算出N-1个点,并通过这N-1个点做垂直于线段L的N-1条直线;
S14、通过S13所述的N-1条直线,计算N-1条直线和ROI区域边缘的交点,将完整的ROI分成近乎均分的N份分段ROI区域。
S2、基于传统的背景建模和前景检测技术和帧间差分方法检测ROI区域中的静止前景目标像素和运动前景目标像素,所述目标像素为车辆;本实施例判断高点拥堵的依据是车辆目标像素占ROI区域的百分比,检测出车辆目标像素是基础,本发明利用背景建模和前景检测的方法检测前景像素(前景像素就认为是车辆目标像素)。根据车辆是运动的还是静止的,将车辆目标像素分为静止车辆目标和运动车辆目标两种,其检测方法如图5所示。
根据图5所示,视频流导入每一帧图像,首先经过图像预处理。图像预处理包括图像截图,根据标定的ROI区域,截取最小的图像矩形区域包括完整的ROI区域,并对最小矩形区域进行图像缩放,然后将彩色原图转换成灰度图,截取最小矩形区域和缩放是为了减少后期图像处理的计算量。
得到的灰度图分别经过帧间差分算法和VIBE算法,分别检测出运动变化的像素和实时前景像素。通过求与运输检测出“运动前景像素”和“实时静止前景像素”。通过缓存的静止前景像素和帧间差分检测到的静止目标像素利用求与运算得到“缓存的静止前景像素”。然后通过或运行,得到最终的“静止前景像素”结果,并利用结果更新缓存的静止前景像素。之所以需要使用“缓存的静止前景像素”,是因为当目标有运动变成静止后,VIBE算法经过一段时间(几秒)的更新,会将静止的前景像素识别成背景像素,无法有效的检测到静止的车辆目标。所以在车辆目标刚从运动变成静止尚未被识别成背景时,将其状态缓存,在稍后被VIBE识别成背景后,仍可有效的检测到静止的车辆目标。需要说明的是:VIBE算法是利用的开源算法,帧间差分是数字图像处理的通用算法之一,本实施例只是利用这两种方法来检测到的运动前景目标像素和静止前景目标像素。
S3、计算单帧图像内的静止前景目标像素和运动前景目标像素的空间占有率:
S31、如图6所示,计算单帧图像内分段ROI区域的静止前景目标像素和运动前景目标像素的空间占有率:
分别计算每个分段ROI区域的静止前景目标像素和运动前景目标像素的空间占有率,针对每个分段ROI区域的静止前景目标像素和运动前景目标像素的空间占有率spr设定阈值thresh,当该分段ROI区域的spr>thresh时,采用赢者全拿的规则,认定该分段ROI区域的静止前景目标像素和运动前景目标像素的空间占有率分别为1,即得到处理后的每个分段ROI区域的静止前景目标像素和运动前景目标像素的空间占有率;之所以采用赢者全拿的规则,是因为车辆目标之间会存在间隙,间隙之间是背景像素,但是间隙比较小时,无法容纳一辆车,也认为被车辆占据,认为是前景。所以当前景的空间占有率大于阈值时,即判定该分段ROI的空间占有率为1。
S32、通过平滑处理计算出完整ROI区域的静止前景目标像素和运动前景目标像素的空间占有率,具体如图7所示:
如果一个分段ROI区域的前后两个分段ROI区域的静止前景目标像素或运动前景目标像素的空间占有率都是1,则该分段ROI区域的静止前景目标像素和运动前景目标像素的空间占有率均为1。
经过S1至S3处理后,获取了车辆目标(前景)的空间占有率,接下来通过一段时域空间内的空间占有率进行统计分析,得到最终的拥堵信息,具体包括:
S4、设定连续多帧图像为一个采样周期,采样周期一般是比较短的一段时间(1~2秒),在采样周期内需要做以下两个任务:稳定性判定和空间占有率计算。稳定性评测是利用每帧图像检测的空间占有率变化梯度来判断在一个采样周期内是否存在异常波动,如果存在空间占有率异常波动,该采样周期不作为判定拥堵的依据。如果波动正常,对采样周期内的空间占有率做平滑处理后,求采样周期内静止车辆目标和运动车辆目标的空间占有率:
S41、波动异常判定
对于一个采样周期连续N帧画面计算出静止车辆目标和运动车辆目标的空间占有率组成的N维向量[spr1~sprn],空间占有率变化梯度计算公式:
设置一个梯度变化的阈值grad_thresh,当求得的空间占有率梯度grad>grad_thresh时,即判断发生异常波动;
S42、采样周期空间占有率计算:
当通过异常波动判定模块,确定没有异常波动后,分别对一个采样周期连续N帧画面计算出静止车辆目标和运动车辆目标的空间占有率组成的N维向量[spr1~sprn],通过平滑处理和向上取均值处理,计算采样周期内静止车辆目标和运动车辆目标的空间占有率,采用均值滤波的方式进行平滑处理,均值滤波公式为:
经过平滑处理后的空间占有率[sprm1~sprmn],经过向上取均值的方式求采样周期内静止车辆目标和运动车辆目标的空间占有率,向上取均值计算公式:
如式(3)所示,经过平滑处理后的空间占有率[sprm1~sprmn],求其平均值avg(sprm1~sprmn),然后对[sprm1~sprmn]中所有大于均值的元素求均值,得到采样周期内静止车辆目标和运动车辆目标的空间占有率;
S43、采样周期拥堵判定:
针对计算得到的静止车辆目标的空间占有率sprs,配置两个阈值sprs_min和sprs_max,其中sprs_max>sprs_min,针对计算得到的运动车辆目标空间占有率sprm,配置两个阈值sprm_min和sprm_max,通过公式(4)所示的判定逻辑判断采样周期内是否发生了拥堵事件;
sprs>sprs_max||sprm>sprm_max||(sprs>sprs_min&&sprm>sprm_min) (4)。
S5、长时域空间拥堵统计分析和判定:
将多个采样周期组成一个长时间域(几十秒以上),在长时间域内,通过求拥堵时间占总时间的比例即拥堵事件占空比,以及拥堵和非拥堵状态之间的跳变频率来衡量一个拥堵事件的严重程度,拥堵事件占空比越大同时跳变频率越低,拥堵就越严重。如图8所示,可以将拥堵事定义为“1”高电平,非拥堵定义为“0”低电平,得到在1和0之间高低电平跳变的矩形波,其中高电平的占空比越大,拥堵越严重。
本发明的技术方案不限于上述具体实施例的限制,凡是根据本发明的技术方案做出的技术变形,均落入本发明的保护范围之内。
- 一种高点视频监控拥堵事件检测方法
- 一种静默式低点视频监控交通拥堵事件检测方法