一种基于生成式对抗网络的交通流预测方法
文献发布时间:2023-06-19 09:47:53
技术领域
本发明涉及一种基于生成式对抗网络的交通流预测方法,本发明属于交通领域。
背景技术
随着科技的快速发展,人们的生活质量也在稳步地提高。伴随着生活质量的提高,车辆数量也在迅猛地增加,与之而来的就是交通运输问题的日趋复杂,交通数据预测也逐渐成为了交通行业理论研究者和实践者关注的热点问题,并且交通数据预测的理论和方法也在不停的迭代发展中。
现今已经存在了很多对于交通数据预测具有一定代表性的方法。例如一些遗传算法、支持向量机、数据挖掘方法、灰色理论等方法。再比如对时间序列数据进行特征提取的LSTM、利用自编码器SAE进行特征提取、基于CNN对交通图进行特征提取的方法等等。
现今存在的方法中考虑到了对时序交通数据的预测,也有考虑到对交通图进行特征提取,但这些方法中存在的不足是在考虑交通图的时候并没有充分考虑到交通图中节点的领域节点特征对于预测的影响。
发明内容
针对以上不足,本发明的目的在于提供一种基于生成式对抗网络的交通流预测方法。该方法利用路段的空间连接关系构建交通物理拓扑结构图网络并构建初始邻域交通图网络,从初始邻域交通图网络中寻找并构建交通图中节点的高阶邻域,并得到高阶邻域交通图网络,接着利用图注意力网络提取高阶邻域图网络的邻域节点特征,最后将图注意力网络放入对抗网络的生成器中对抗生成交通数据进行交通数据预测。
本发明解决其技术问题所采纳的技术方案是:
一种基于生成式对抗网络的交通流预测方法,包括以下步骤:
对于交通流,通常分为交通流数据和交通流状态,本发明中的交通流均指交通流数据。
步骤1:构建交通物理拓扑结构图网络:根据交通路网中路段间的空间连接关系构建交通物理拓扑结构图网络,将路段看作节点,相连的路段看作对应的节点相连接,进而得到交通物理拓扑结构图网络;
步骤2:构建初始邻域交通图网络与高阶邻域交通图网络:将步骤1中构建的交通物理拓扑结构图网络作为初始邻域交通图网络,并将初始邻域交通图网络中原节点的相邻节点的邻居节点看作原节点的二阶邻域内节点,以此来构建二阶邻域交通图网络,以此类推,进而得到高阶邻域交通图网络;
步骤3:构建生成式对抗网络(GAN)的生成器:生成式对抗网络的生成器用于生成交通数据。本发明中,生成器中采用图注意力网络(GAT)进行特征提取,基于步骤2中得到的初始邻域交通图网络与多个高阶邻域交通图网络,对交通图网络中各个节点邻域中的节点信息进行特征提取并生成预测的交通数据,其中,节点的信息代表的就是路段上检测器的时序交通数据信息;
步骤4:构建生成式对抗网络(GAN)的判别器:生成式对抗网络的判别器用于判别输入的交通数据是否为真,本发明中,生成式对抗网络的判别器采用多层全连接网络来对交通数据的真假进行判别;
步骤5:利用生成式对抗网络(GAN)生成交通数据:由生成式对抗网络中的生成器与判别器的相互博弈最终产生与真实交通数据相近的预测交通数据,并将预测交通数据与真实交通数据进行验证计算误差。
进一步,所述步骤2中,构建高阶邻域交通网络图时,将原节点的相邻节点的邻居节点看作原节点的邻域内节点,以此类推,进而得到对应的高阶邻域邻接矩阵。
再进一步,所述步骤3中,图注意力网络中构建的图注意力层分别对交通图中节点的自注意力和领域注意力进行了表征,并用张量的粘合操作将二者融合起来,接着加入了一层mask将不相连的节点注意力过滤掉,得到注意力矩阵。最后将注意力矩阵与节点特征进行相乘求和操作得到特征信息。
更进一步,所述步骤3中,生成式对抗网络中采用的图注意力网络首先用了3层的图注意力层,得到三层图注意力层的特征矩阵后将他们拼接后输入新的一层图注意力层,其后加入了一个全连接层得到最终的预测流量值,损失函数为生成的流量值与真实流量值的差值。
所述步骤4中,判别器网络采用的是三层全连接网络,隐藏节点数分别为32、16、1,最终得到判别流量值是否为真的概率。
所述步骤5中,利用生成式对抗网络中生成器与判别器的相互博弈,相互进步,不断地更新权值,得到一个最佳模型,最终预测出与真实值相近的交通流量值。
本发明的有益效果:通过空间拓扑关系得到交通图网络中节点的高阶邻域,进而利用图注意力网络对邻域节点的信息进行特征提取,最后将图注意力网络作为生成式对抗网络的生成器最终形成了一个对交通数据进行预测的模型。本发明提取节点高阶邻域特征的过程很好地考虑到了节点的周围节点对于自身的影响,克服了对交通图中周围节点特征提取不充分的不足,且允许为交通图不同相邻节点指定不同的权重,提高了模型对于空间相关性的捕捉能力。并很好地利用了生成式对抗网络,减小了模型对交通数据的预测差值。
附图说明
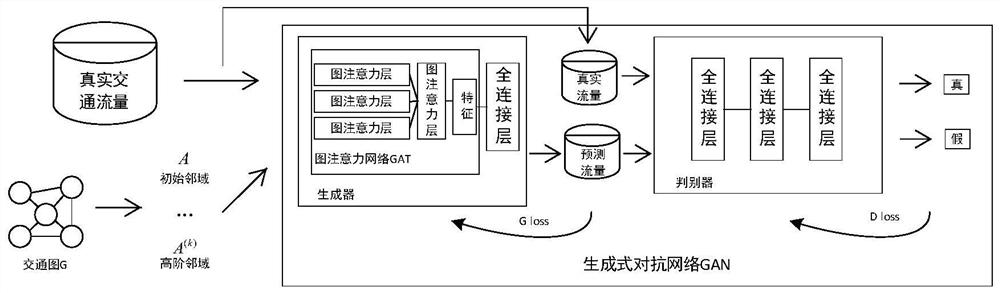
图1是一种基于生成式对抗网络的结构图。
具体实施方式
下面结合附图对本发明做进一步说明。
参照图1,一种基于生成式对抗网络的交通流预测方法,包括以下步骤:
步骤1:构建交通物理拓扑结构图网络;
对于一个交通图网络,我们通常将交通图网络中的路口作为节点,并将路段作为连边处理,而对于本发明,对于交通路段的空间拓扑结构,将路段看作节点,根据路段间的连接关系构建交通图网络,将此交通图网络表示为:
G
其中N={N
步骤2:构建初始邻域交通图网络与高阶邻域交通图网络;
将原始交通图网络视为初始邻域交通图网络,将由初始邻域交通图网络中节点的高阶邻居组成的网络称为高阶邻域交通图网络,对于构建的任意k阶邻域交通图网络,都存在一个邻接矩阵A
其中,初始邻域的行与列都代表交通图中的节点,A
进一步,将初始邻域交通图网络中所有相连节点间的距离都看作1,不相连节点间的距离都看作0,若节点N
其中,d(N
即可得到k阶邻域交通网络图G
假设一共选择l阶邻域交通图网络,则可以得到包含l个交通图网络的集合,即{G
步骤3:构建生成式对抗网络(GAN)的生成器;
生成式对抗网络的生成器作为生成式对抗网络的生成模型,其作用为根据输入的真实交通数据生成预测交通数据,本发明中采用图注意力网络(GAT)作为生成式对抗网络的生成器,对高阶交通图网络中邻域节点的信息进行特征提取;
其中,利用图注意力网络进行特征提取的步骤如下:
图注意力网络由p个图注意力层构成,对于一层图注意力层,描述分为三个部分,第一部分为对于输入的节点特征进行特征提取;第二部分为根据交通图网络中的节点连接关系为节点特征加入图注意力机制;第三部分为在第一部分提取的特征中加入图注意力机制得到最终的节点特征,对于第q(q=1,2,…,p)个图注意力层的描述如下:
第一部分:对于输入的节点信息进行特征提取;
定义k阶邻域交通图网络G
Xhidden
其中,W
第二部分:为k阶邻域交通图网络节点特征加入图注意力机制;
对于k阶邻域交通图网络,为k阶邻域交通图网络节点特征加入图注意力机制的关键在于构建一个注意力系数矩阵Hattn
其中,元素a
为得到t时刻的注意力系数矩阵,分别定义一个F’×1维的自注意力权重Jself
其中Sself
接着对自注意力指标和邻域节点注意力指标进行粘合,扩充到二维,过程如下:
经过LeakyReLU激活函数进而得到一个同时包含了所有节点间自注意力指标和邻域节点注意力指标的注意力矩阵Hatten
其中,LeakyReLU是使用的激活函数,
以上得到的注意力矩阵Hatten
Hmask
其中,α→-∞,A
将Hatten
Hattn
其中,softmax为激活函数,目的是为了进行标准化;
第三部分:加入图注意力机制得到最终的特征矩阵Xfin
将第二部分中得到的图注意力矩阵与第一部分提取的特征相乘,并经过elu激活函数得到特征矩阵Xout
Xout
其中,elu为激活函数,目的为过滤掉小于零的值;
对于图注意力网络中采用的前p-1个图注意力层,接着将这p-1个图注意力层分别得到的特征矩阵拼接起来得到Xcon
Xcon
其中,concat为拼接操作,p为注意力层数;
再将特征矩阵Xcon
Xfin
其中,LayerGAT
根据上述中构建的图注意力网络,在其后加入一层全连接层得到t时刻后的第ε个数据周期的交通数据V
V
其中,W
在此生成器中,将损失函数G
G
其中,V
步骤4:构建生成式对抗网络(GAN)的判别器;
生成式对抗网络的判别器作为生成式对抗网络的判别模型,其作用为判别生成器生成的交通数据是否为真,在此判别器中,我们采用了三层全连接网络来判别交通数据是否为真的概率,将过程表示如下:
在此判别器中,将损失函数D
D
其中,D()为判别器用来判别t时刻后的第ε个数据周期交通数据为真概率的输出值;
步骤5:利用生成式对抗网络(GAN)生成交通数据;
利用生成式对抗网路生成最接近真实值的交通数据,且最后使用三个差值来衡量预测交通数据与真实交通数据的误差,分别为:均方根误差RMSE、平均绝对误差MAE和平均绝对百分误差MAPE。
实际实验中的选用数据,过程如下:
(1)选用交通数据
选用交通数据为美国加州的交通流量数据,包含24个路段的43天流量数据,其中流量数据的时间间隔为5分钟。
(2)参数确定
步骤2中选取的k阶邻域交通图网络中k=2,每个节点的二阶邻域中包括的最大节点数为3。
步骤3中的生成式对抗网络(GAN)的生成器构建:第一部分中根据交通数据可知交通图中节点数n=24,特征数维数F=12、F’=16,第二部分中激活函数LeakyReLU的负斜率为0.2。生成器采用图注意力层p=4的图注意力网络,初始化权重时的正则化参数为5e-4,学习率为1e-3,迭代次数为150次,重构误差系数α值为500,第三部分中选取的ε为1,表示本发明利用历史的12个周期交通数据来预测下一时刻的交通数据。
步骤4中的生成式对抗网络(GAN)的判别器构建:判别器采用3层的全连接层,节点数分别为32、16、1。
步骤5中的生成式对抗网络(GAN)生成器与判别器的训练过程:生成器每迭代1次判别器迭代3次。
(3)实验结果
对于预测的交通数据,我们使用均方根误差RMSE、平均绝对误差MAE和平均绝对百分误差MAPE来衡量其与真实交通数据的差值。在加州数据实验集上,本发明得到的预测交通数据与真实的交通数据的RMSE值为25.65,MAE值为18.73,MAPE值为8.14%。
- 一种基于生成式对抗网络的交通流预测方法
- 一种基于生成式对抗网络的短时交通流预测方法