无极调速的多电机同步控制系统
文献发布时间:2023-06-19 09:47:53
技术领域
本发明涉及电机同步控制技术领域,具体涉及无极调速的多电机同步控制系统。
背景技术
单台电机驱动在某些场合已经不能满足现代化生产的需要;在造纸、印染、纺织、数控机床等高精度、高转速传动系统中多电机同步控制得到广泛的应用。在许多现代制造业中,大型高精度、高转速传动系统的多电机同步控制是最为核心的问题之一,它的控制性能直接决定了整个加工设备乃至整体自动化生产线的生产水平。多电机同步控制技术在工业领域的应用已经成为自动化生产的一种发展趋势。
直接转矩控制技术以其结构简单、动态特性好、鲁棒性好和易于实现等优点备受关注。但是传统的直接转矩控制技术是根据估算的定子磁链误差、电磁转矩误差以及磁链所在的扇区选择合适的空间电压矢量实现单台电机的转矩控制。传统的多电机同步控制系统中,一台电机和一套驱动器配一台控制器形成整体模块,通过各种反馈信号进行耦合控制。由于控制过程中存在多个反馈控制环节,大大的影响了多电机系统的同步控制性能和快速响应性能。
发明内容
本发明要解决的技术问题是,克服现有技术存在的上述缺陷,提供一种能以一个信号驱动多台大功率电机,并实现同步和无极调速的无极调速的多电机同步控制系统。
本发明解决其技术问题所采用的技术方案是:无极调速的多电机同步控制系统,包括由电网电源连接的发送机和若干台接收机,所述发送机和接收机均为同一型号的交流三相绕线转子异步电机,所述交流三相绕线转子异步电机均连接相同转速和功率;所述发送机机械硬连接有信号电机,所述信号电机连接有无极调速控制器;所述发送机和接收机的定子绕组通过交流接触器与三相电源连接,所述发送机和接收机的转子绕组通过同步电路相连。
进一步的,所述同步电路为串联电路。
进一步的,所述信号电机为异步电机,所述无极调速控制器由变频器替代。
进一步的,所述信号电机为滑差电机,所述无极调速控制器由滑差电机调速器替代。
进一步的,所述信号电机为直流电机,所述无极调速控制器由直流电源替代。
进一步的,所述信号电机为步进电机,所述无极调速控制器由步进电机驱动器替代。
进一步的,所述信号电机是伺服电机,所述无极调速控制器由伺服电机驱动器替代。
进一步的,所述机械硬连接为连轴器、皮带、三角带连接、链条、曲轴、齿轮、涡轮、涡杆、焊接中的一种连接。
进一步的,所述交流三相绕线转子异步电机为同厂家且出品。
工作原理:发送机和接收机为同型号、同品牌、同转速、同功率、同电压、同电流的交流三相绕线转子异步电动机;当发送机和接收机的定子绕组都接通三相电源,其相互连接的转子绕组感应电流频率是相同的,而其定子绕组的电源频率也是相同的50HZ;发送机没有被信号电机驱动时,发送机和接收机的转子感应电势大小相等,电位相互对应;因此转子回路内没有电流,发送机和接收机都是静止不动,信号电机和发送是机械机械硬连接;当无极调速控制器控制信号电机旋转,进而带动发送机以同样速度旋转,从而带动所有接收机以同样的速度旋转;因此接收机必然以发送机同样的转速旋转;当信号电机的转速和方向改变时,发送机和接收机也同时改变,而保持同步;发送机和接收机没有机械的直接硬连接,但能在相隔很远的距离保持同步。信号电机功率可以很小,但能使大功率的发送机和一台或者多台接收机保持同步并实现无极调速。
本发明的有益效果是,能以小功率驱动大功率电机,能以一个信号驱动多台大功率电机,并实现同步和无极调速,而且成本极低,故障率极低,维修简单方便,维护费用极低,使用寿命长,启动圆滑,同步精准、效率高、噪音低、振动小、运行平稳,没有电流冲击和机械冲击等优点,可广泛用于门式起重机,桥式起重机的大、小车的多电机同步和无极调速,还可用于工业生产线的多电机的同步和无极高速,如纺织行业,染整工程的多电机同步和无极调速。
附图说明
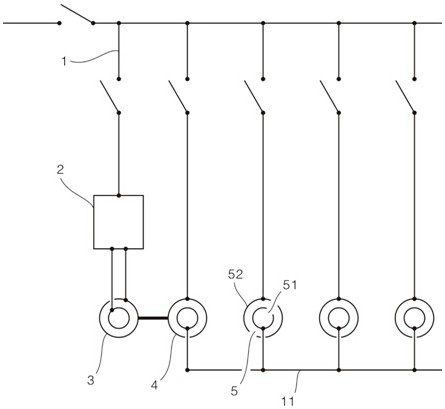
图1是本发明的系统示意图。
附图中:1、电网电源,11、同步电路,2、无极调速控制器,3、信号电机,4、发送机,5、接收机,51、转子绕组,52、定子绕组。
具体实施方式
下面结合实施例对本发明的具体实施方式作进一步详细说明:
如图1所示,无极调速的多电机同步控制系统的实施例1,包括由电网电源1连接的发送机4和若干台接收机5,发送机4和接收机5均为同厂家且同批次出品的同一型号的交流三相绕线转子异步电机,交流三相绕线转子异步电机均连接相同转速和功率;发送机4机械硬连接有信号电机3,信号电机3连接有无极调速控制器2;发送机4和接收机5的定子绕组52通过交流接触器与三相电源连接,发送机4和接收机5的转子绕组51通过串联的同步电路11连接。
信号电机3为异步电机,无极调速控制器2由变频器替代;机械硬连接为连轴器连接。
无极调速的多电机同步控制系统的实施例2,包括由电网电源1连接的发送机4和若干台接收机5,发送机4和接收机5均为同厂家且同批次出品的同一型号的交流三相绕线转子异步电机,交流三相绕线转子异步电机均连接相同转速和功率;发送机4机械硬连接有信号电机3,信号电机3连接有无极调速控制器2;发送机4和接收机5的定子绕组52通过交流接触器与三相电源连接,发送机4和接收机5的转子绕组51通过串联的同步电路11连接。
信号电机3为滑差电机,无极调速控制器2由滑差电机调速器替代;机械硬连接为链条连接。
无极调速的多电机同步控制系统的实施例3,包括由电网电源1连接的发送机4和若干台接收机5,发送机4和接收机5均为同厂家且同批次出品的同一型号的交流三相绕线转子异步电机,交流三相绕线转子异步电机均连接相同转速和功率;发送机4机械硬连接有信号电机3,信号电机3连接有无极调速控制器2;发送机4和接收机5的定子绕组52通过交流接触器与三相电源连接,发送机4和接收机5的转子绕组51通过串联的同步电路11连接。
信号电机3为直流电机,无极调速控制器2由直流电源替代;机械硬连接为曲轴连接。
无极调速的多电机同步控制系统的实施例4,包括由电网电源1连接的发送机4和若干台接收机5,发送机4和接收机5均为同厂家且同批次出品的同一型号的交流三相绕线转子异步电机,交流三相绕线转子异步电机均连接相同转速和功率;发送机4机械硬连接有信号电机3,信号电机3连接有无极调速控制器2;发送机4和接收机5的定子绕组52通过交流接触器与三相电源连接,发送机4和接收机5的转子绕组51通过串联的同步电路11连接。
信号电机3为步进电机,无极调速控制器2由步进电机驱动器替代;机械硬连接为焊接。
无极调速的多电机同步控制系统的实施例5,包括由电网电源1连接的发送机4和若干台接收机5,发送机4和接收机5均为同厂家且同批次出品的同一型号的交流三相绕线转子异步电机,交流三相绕线转子异步电机均连接相同转速和功率;发送机4机械硬连接有信号电机3,信号电机3连接有无极调速控制器2;发送机4和接收机5的定子绕组52通过交流接触器与三相电源连接,发送机4和接收机5的转子绕组51通过串联的同步电路11连接。
信号电机3为伺服电机,无极调速控制器2由伺服电机驱动器替代;机械硬连接为齿轮连接。
以上仅是本发明的优选实施方式,应当指出,对于本领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应当视为在本发明的保护范围之内。
说明书中未详细说明的内容属于本领域技术人员熟知的现有技术。
- 无极调速的多电机同步控制系统
- 一种无极调速驱动电机