一种农业灌溉节水装置
文献发布时间:2023-06-19 09:49:27
技术领域
本发明涉及灌溉设备领域,特别涉及一种农业灌溉节水装置。
背景技术
在目前的农业灌溉中,大多都是使用浇灌车会农田中的作物进行浇灌,这样通常是从上至下的对农作物进行浇灌,这样的浇灌方式向下雨一样,先经过农作物身体,在到达土壤中,之后才能被土壤进行吸收,这样的方式会在一定程度上导致水资源的蒸发,尤其是在炎热的地方,这样的方式更加不能使得土壤对水分充分的吸收,从而一定程度上造成了水资源的浪费。
发明内容
本发明的目的是克服上述现有技术中存在的问题,提供一种农业灌溉节水装置,通过爬行机器人腿部设置能插入地面的水管,同时在根据水管的上下运动使得对插入水箱进行放水,这样就可以使得将水资源直接浇灌在地面,从而使得土壤可以充分的对水资源进行吸收。
为此,本发明提供一种农业灌溉节水装置,包括:爬行机器人,其包括机械腿;水箱,设置在所述爬行机器人的上方,通过连接体与所述爬行机器人连接,其底部对应所述爬行机器人的机械腿的上方开设有通口,通口上设置有用于封闭所述通口的封闭层;限位管,与所述通口同轴设置在所述通口的下方,其顶部固定在所述水箱的底面;导水管,套设在所述限位管的内部,能够沿所述限位管的长度方向上运动,能够开启所述封闭层,其下端通过长度可变的伸缩杆与所述爬行机器人的机械腿连接。
进一步,还包括:水位传感器,设置在所述水箱内壁的底部,用于检测水箱内的水位;定位器,设置在所述水箱上,用于定位水箱所在的位置;通信器,设置在所述水箱上,用于向用户终端通信;中央处理器,用于接收水位传感器所检测到的水位,当水位到达设定的水位的时候,获取定位器的得到的位置信息,并将位置信息通过通信器发送到用户终端,同时使得所述爬行机器人停止工作;电源装置,用于给所述中央处理器、水位传感器、定位器、通信器以及爬行机器人提供供电服务。
进一步,还包括:定位器,设置在所述水箱上,用于定位水箱所在的位置;提示器,设置在所述水箱上,用于发出提示声音;中央处理器,实时的接收所述定位器的获得的位置,并在设定的位置的时候,使得提示器发出提示的声音,同时使得所述爬行机器人停止工作;电源装置,用于给所述中央处理器、定位器、提示器以及爬行机器人提供供电服务。
进一步,所述水箱上设置箱盖。
进一步,所述封闭层包括:多个封闭板,每一个封闭板的形状为均扇形,全部的封闭板沿半径拼接后能够封闭所述通口,每一个封闭板的弧形边缘通过第一铰接件铰接在所述通口的口壁上。
更进一步,所述第一铰接件为扭力弹簧,当扭力弹簧为不受力的状态的时候,所述封闭板封闭所述通口,当扭力弹簧为受力状态的时候,所述封闭板与所述通口所在的平面产生夹角。
进一步,所述限位管和所述导水管之间滑动连接。
进一步,所述爬行机器人包括:立方壳体,其顶部与所述连接体连接;机械腿,其数量有四个,每一个所述机械腿位于所述立方壳体的其中一个侧棱的外侧;连接臂,其数量有四个,每一个所述连接臂的一端通过第二铰接件铰接在所述立方壳体顶面的一个顶角上,每一个所述连接臂的另一端通过第三铰接件与其位置对应的一个所述机械腿的顶部铰接;从动齿轮,其数量有两个,且分别景象设置在所述立方壳体的内部,每一个所述从动齿轮的前后两端均穿过所述立方壳体的表面;驱动臂,其数量有四个,每一个所述驱动臂的一端分别通过第四铰接件铰接在一个所述从动齿轮的一端,每一个所述驱动臂的另一端分别通过第五铰接件铰接在每一个所述机械腿的中部,同侧的两个所述第四铰接件沿两个所述从动齿轮之间的中线位置相对,对侧的两个所述第四铰接件沿所述从动齿轮的中心位置相对;支撑臂,其数量有四个,每一个所述支撑臂的一端通过第六铰接件铰接在所述立方壳体底面的一个顶角上,每一个所述支撑臂的另一端通过第六铰接件与其位置对应的一个所述机械腿的中部铰接;驱动机构,用于驱动两个所述从动齿轮同向转动,与电源装置电连接。
更进一步,所述驱动机构包括:电机,固定在所述立方壳体的一侧内壁上,与所述电源装置电连接;主动齿轮,设置在所述立方壳体的内部,分别与两个所述从动齿轮啮合,所述主动齿轮的一端通过键与所述电机的输出轴连接,主动齿轮的另一端通过轴承连接在所述立方壳体的另一侧内壁上。
更进一步,所述驱动臂为弧形结构。
本发明提供的一种农业灌溉节水装置,具有如下有益效果:
1、本发明通过爬行机器人腿部设置能插入地面的水管,同时在根据水管的上下运动使得对插入水箱进行放水,这样就可以使得将水资源直接浇灌在地面,从而使得土壤可以充分的对水资源进行吸收;
2、本发明在水箱上设置定位装置,当本发明到的供水地点的时候,可以自动的停下,发出警报,使得工作人员对其蓄水;
3、本发明在水箱中设置水位检测装置,水箱中的水源即将使用完毕的时候,将水箱的位置信息发送给工作人员同时使得被发明停止在当前位置,这样就可以使得工作人员及时的对水箱进行供水。
附图说明
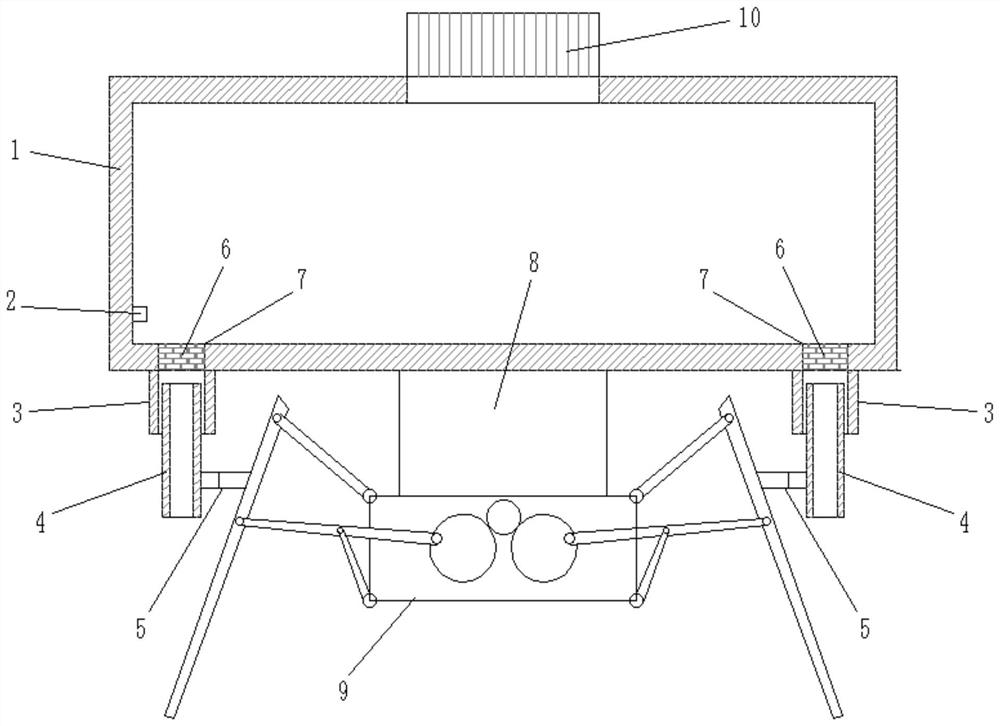
图1为本发明的整体结构示意图;
图2为本发明中爬行机器人的纵向结构示意图;
图3为本发明中爬行机器人的横向结构示意图。
附图标记说明:
1、水箱;2、水位传感器;3、限位管;4、导水管;5、伸缩杆;6、封闭层;7、通口;8、连接体;9、爬行机器人;9-1、立方壳体;9-2、支撑臂;9-3、驱动臂;9-4、机械腿;9-5、连接臂;9-6、从动齿轮;9-7、主动齿轮;9-8、电机;9-9、轴承;10、箱盖。
具体实施方式
下面结合附图,对本发明的一个具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
在本申请文件中,未经明确的部件型号以及结构,均为本领域技术人员所公知的现有技术,本领域技术人员均可根据实际情况的需要进行设定,在本申请文件的实施例中不做具体的限定。
具体的,如图1所示,本发明实施例提供了一种农业灌溉节水装置,包括:爬行机器人9、水箱1、限位管3以及导水管4。其中,爬行机器人9中必然包括用于爬行时与地面接触的机械腿9-4。水箱1设置在所述爬行机器人9的上方,通过连接体8与所述爬行机器人9连接,其底部对应所述爬行机器人9的机械腿9-4的上方开设有通口7,通口7上设置有用于封闭所述通口7的封闭层6。限位管3与所述通口7同轴设置在所述通口7的下方,其顶部固定在所述水箱1的底面。导水管4套设在所述限位管3的内部,能够沿所述限位管3的长度方向上运动,能够开启所述封闭层6,其下端通过长度可变的伸缩杆5与所述爬行机器人9的机械腿9-4连接。
上述技术方案中,用户在水箱1中放入要灌溉的水,如果需要将营养液一同放入,则需要在所述用户提前自行配置好之后将配置好的浇灌用的水资源放置在水箱1中,然后使得爬行机器人9在农田中爬行,在爬行机器人9爬行的过程中,其机械腿9-4会上下的进行移动,因此,会使得伸缩杆5上下的进行运动,这样就会使得导水管4进行上下的运动,在导水管4运动到最上方的时候,将通口7上的封闭层6开启,使得水箱1中的水放出来,在导水管4运动到下方的时候,将通口7上的封闭层6关闭,使得水箱1中的水不能被放出来。这样就可以使得本发明在使用的时候,随着爬行机器人9的不断前进,使得水箱中的水被依次少量的在各个位置进行释放,这样就可以使得在浇灌的时候,可以直接将水被浇灌在土壤上面,这样就可以使得在浇灌的时候,进行有效的节水,使得水资源得到最大程度的利用。
在本发明中,加入中央处理器,使得本发明更加的智慧化,可以使得在浇灌的过程中,高效的对水箱1中的水资源进行补给。具体包括以下两种方式。
方式一:
在本实施例中,本发明还包括:水位传感器2、定位器、通信器、中央处理器以及电源装置。其中,水位传感器2设置在所述水箱1内壁的底部,用于检测水箱1内的水位。定位器设置在所述水箱1上,用于定位水箱1所在的位置。通信器设置在所述水箱1上,用于向用户终端通信。中央处理器用于接收水位传感器2所检测到的水位,当水位到达设定的水位的时候,获取定位器的得到的位置信息,并将位置信息通过通信器发送到用户终端,同时使得所述爬行机器人9停止工作。电源装置用于给所述中央处理器、水位传感器2、定位器、通信器以及爬行机器人9提供供电服务。
上述技术方案中,在水位传感器2检测到水位,将水位发送到中央处理器,当中央处理器认为水位到的设定的水位的时候,即是需要补充水位的时候,用过通信器向用户终端发送信息,同时将定位器的位置信息一同发送到用户终端,用户终端是用户手持的,这样就可以使得用户可以在用户终端上看到当水箱1中没有水的时候收到信息,就可以进行及时的对水箱1进行补给。
方式二:
在本实施例中,本发明还包括:定位器、提示器、中央处理器以及电源装置。其中,定位器设置在所述水箱1上,用于定位水箱1所在的位置。提示器设置在所述水箱1上,用于发出提示声音。中央处理器实时的接收所述定位器的获得的位置,并在设定的位置的时候,使得提示器发出提示的声音,同时使得所述爬行机器人9停止工作。电源装置用于给所述中央处理器、定位器、提示器以及爬行机器人9提供供电服务。
上述技术方案中,需要在农业的设定位置处设置补水站,补水站有人员进行值守,当本发明到的补水站的位置的时候,即中央处理器认为设定的位置,就会发出提示的声音,使得工作人员对本发明的水箱1进行补水。
另外,在本实施例中,所述水箱1上设置箱盖10。这样就可以使得本发明的水箱1在补水的时候,可以通过打开箱盖10的方式进行。
在本实施例中,所述封闭层6包括多个封闭板。每一个封闭板的形状为均扇形,全部的封闭板沿半径拼接后能够封闭所述通口7,每一个封闭板的弧形边缘通过第一铰接件铰接在所述通口7的口壁上。
上述技术方案中,导水管4运动到最上方的时候,能够将封闭板向上顶起,这样就可以使得封闭层6开启,这样就可以使得水源顺着导水管4流出,在导水管4运动到下方的时候,在重力的作用下,封闭板向下封闭,就可以使得封闭层6封闭,水资源位于水箱1的内部。
同时,在本实施例中,所述第一铰接件为扭力弹簧,当扭力弹簧为不受力的状态的时候,所述封闭板封闭所述通口7,当扭力弹簧为受力状态的时候,所述封闭板与所述通口7所在的平面产生夹角。
上述技术方案中,使用扭力弹簧可以使得封闭板的运动具有一定的阻力,这样可以使得水源更加不容易流出水箱1,这样就可以使得封闭层6在封闭的时候效果更好。
在本实施例中,所述限位管3和所述导水管4之间滑动连接。这样就可以使得所述限位管3和所述导水管4之间的位置更加的相对确定。
在本实施例中,如图2-3所示,所述爬行机器人9包括:立方壳体9-1、机械腿9-4、连接臂9-5、从动齿轮9-6、驱动臂9-3、支撑臂9-2以及驱动机构。其中,立方壳体9-1的顶部与所述连接体8连接。机械腿9-4的数量有四个,每一个所述机械腿9-4位于所述立方壳体9-1的其中一个侧棱的外侧。连接臂9-5的数量有四个,每一个所述连接臂9-5的一端通过第二铰接件铰接在所述立方壳体9-1顶面的一个顶角上,每一个所述连接臂9-5的另一端通过第三铰接件与其位置对应的一个所述机械腿9-4的顶部铰接。从动齿轮9-6的数量有两个,且分别景象设置在所述立方壳体9-1的内部,每一个所述从动齿轮9-6的前后两端均穿过所述立方壳体9-1的表面。驱动臂9-3的数量有四个,每一个所述驱动臂9-3的一端分别通过第四铰接件铰接在一个所述从动齿轮9-6的一端,每一个所述驱动臂9-3的另一端分别通过第五铰接件铰接在每一个所述机械腿9-4的中部,同侧的两个所述第四铰接件沿两个所述从动齿轮9-6之间的中线位置相对,对侧的两个所述第四铰接件沿所述从动齿轮9-6的中心位置相对。支撑臂9-2的数量有四个,每一个所述支撑臂9-2的一端通过第六铰接件铰接在所述立方壳体9-1底面的一个顶角上,每一个所述支撑臂9-2的另一端通过第六铰接件与其位置对应的一个所述机械腿9-4的中部铰接。驱动机构用于驱动两个所述从动齿轮9-6同向转动,与电源装置电连接。
上述技术方案中,在电源装置供电的作用下,使得两个所述从动齿轮9-6同向转动,这样就会使得驱动臂9-3沿着从动齿轮9-6的转动进行转动,这样就会使得机械腿9-4随着进行圆周性质的运动,同时,由于机械腿9-4的顶部通过连接臂9-5连接在立方壳体9-1的顶部的边角处,这样就可以使得机械腿9-4模拟出爬行的运动方式,另外,支撑臂9-2是为了起到支撑的作用,使得机械腿9-4与立方壳体9-1位置在限定的范围内。
在本发明中,爬行机器人9在图2的方向上所左右运动的。
同时,在本实施例中,所述驱动机构包括:电机9-8、主动齿轮9-7以及轴承9-9。其中,电机9-8固定在所述立方壳体9-1的一侧内壁上,与所述电源装置电连接。主动齿轮9-7设置在所述立方壳体9-1的内部,分别与两个所述从动齿轮9-6啮合,所述主动齿轮9-7的一端通过键与所述电机9-8的输出轴连接,主动齿轮9-7的另一端通过轴承9-9连接在所述立方壳体9-1的另一侧内壁上。
上述技术方案中,电机9-8在电源装置的作用下进行工作,即电机9-8的输出轴转动,此时,就会使得主动齿轮9-7转动,由于主动齿轮9-7分别与两个所述从动齿轮9-6啮合,这样就会使得两个从动齿轮9-6同时进行同向的转动,轴承9-9可以使得主动齿轮9-7转动的更加顺畅。
同时,在本实施例中,所述驱动臂9-3为弧形结构。这样就可以使得机械腿9-4的运动更加的协调,该驱动臂9-3的弧形弧度的设置与支撑臂9-2的长短有关。
以上公开的仅为本发明的几个具体实施例,但是,本发明实施例并非局限于此,任何本领域的技术人员能思之的变化都应落入本发明的保护范围。
- 一种农业灌溉节水装置
- 一种农业灌溉节水装置