一种基于运动学的轮式移动机器人抗饱和控制方法
文献发布时间:2023-06-19 09:52:39
技术领域
本发明属于机器人控制的技术领域,具体涉及一种基于运动学的轮式移动机器人抗饱和控制方法。
背景技术
平面移动机器人作为一种移动平台具有机械结构简单、移动灵活、载重能力强等特点,在智能家居、仓库储存、物流搬运等场景都有广泛的应用,受到广泛关注。
平面移动机器人的驱动是依靠电机带动驱动轮进行驱动,在实际工程中,电机由于物理条件的限制只能达到有限的转速,因此平面移动机器人的轨迹跟踪控制存在执行器饱和现象。执行器饱和会导致系统调节时间延长、超调增大、甚至系统不稳定。而在现有的抗饱和控制器中,往往通过选取极小的控制器可调节参数使得控制器避开饱和现象,这种方法往往不能充分利用执行器的驱动能力,使得系统稳定速度大大降低。
发明内容
本发明的目的在于:针对现有技术的不足,提供一种基于运动学的轮式移动机器人抗饱和控制方法,解决了轮式移动机器人轨迹跟踪控制容易达到执行器饱和的问题,使得轮式移动机器人能够充分利用执行器的驱动能力,在执行器会处于饱和状态,还能够稳定完成轨迹跟踪。
为了实现上述目的,本发明采用如下技术方案:
一种基于运动学的轮式移动机器人抗饱和控制方法,包括以下步骤:
步骤一:建立受执行器饱和约束的轮式移动机器人运动学模型;
步骤二:输入轮式移动机器人的期望轨迹,根据期望轨迹和轮式移动机器人当前姿态构建误差系统;
步骤三:设计抗饱和控制器,使得执行器饱和的轮式移动机器人轨迹跟踪系统处于稳定状态;
步骤四:采用李亚普诺夫函数对抗饱和控制器进行检验。
作为本发明所述的一种基于运动学的轮式移动机器人抗饱和控制方法的一种改进,所述抗饱和控制方法的被控对象为轮式移动机器人,所述轮式移动机器人的前轮为万向轮,所述轮式移动机器人的后轮为驱动轮。
作为本发明所述的一种基于运动学的轮式移动机器人抗饱和控制方法的一种改进,所述轮式移动机器人的位姿为:
位姿向量q=[x y θ]
其中O为所述轮式移动机器人的几何中心点,θ是所述轮式移动机器人运动方向与X轴正向的夹角,用v和w分别表示所述轮式移动机器人前进时整体的线速度和角速度,也是轮式移动机器人运动学模型的输入,受执行器饱和约束;
所述受执行器饱和约束的轮式移动机器人的运动学方程为:
其中,|v|≤v
作为本发明所述的一种基于运动学的轮式移动机器人抗饱和控制方法的一种改进,期望轮式移动机器人的位姿向量为:
q
其中,(x
可知轮式移动机器人位姿误差微分方程为:
作为本发明所述的一种基于运动学的轮式移动机器人抗饱和控制方法的一种改进,所述抗饱和控制器为
式中
其中h>0为正常数,k
作为本发明所述的一种基于运动学的轮式移动机器人抗饱和控制方法的一种改进,所述抗饱和控制器可分为两种情形;
情形一:当|f(e
情形二:当|f(e
记
本发明的有益效果在于,本发明包括步骤一:建立受执行器饱和约束的轮式移动机器人运动学模型;步骤二:输入轮式移动机器人的期望轨迹,根据期望轨迹和轮式移动机器人当前姿态构建误差系统;步骤三:设计抗饱和控制器,使得执行器饱和的轮式移动机器人轨迹跟踪系统能够稳定;步骤四:采用李亚普诺夫函数对抗饱和控制器进行检验。本发明充分利用执行器的驱动能力,控制参数少,易于工程调节,便于工程实现,用李亚普诺夫函数证明其稳定性,确保执行器饱和的轮式移动机器人全局稳定。本发明应用于轮式移动机器人的抗饱和轨迹跟踪控制。
附图说明
下面将参考附图来描述本发明示例性实施方式的特征、优点和技术效果。
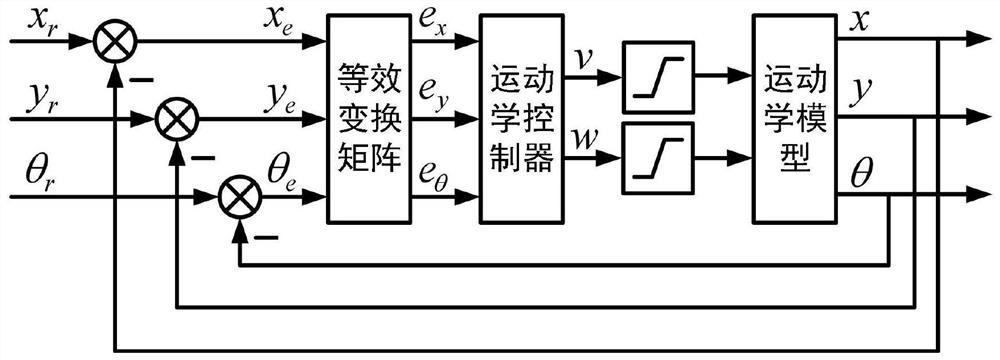
图1为本发明的结构示意图。
图2为本发明的流程示意图。
图3为本发明的控制器输出曲线图。
图4为本发明的轨迹跟踪的示意图。
具体实施方式
如在说明书及权利要求当中使用了某些词汇来指称特定组件。本领域技术人员应可理解,硬件制造商可能会用不同名词来称呼同一个组件。本说明书及权利要求并不以名称的差异来作为区分组件的方式,而是以组件在功能上的差异来作为区分的准则。如在通篇说明书及权利要求当中所提及的“包含”为一开放式用语,故应解释成“包含但不限定于”。“大致”是指在可接受的误差范围内,本领域技术人员能够在一定误差范围内解决技术问题,基本达到技术效果。
此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
在发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
以下结合附图1~4对本发明作进一步详细说明,但不作为对本发明的限定。
一种基于运动学的轮式移动机器人抗饱和控制方法,包括以下步骤:
步骤一:建立受执行器饱和约束的轮式移动机器人运动学模型;
步骤二:输入轮式移动机器人的期望轨迹,根据期望轨迹和轮式移动机器人当前姿态构建误差系统;
步骤三:设计抗饱和控制器,使得执行器饱和的轮式移动机器人轨迹跟踪系统处于稳定状态;
步骤四:采用李亚普诺夫函数对抗饱和控制器进行检验。
在根据本发明的基于运动学的轮式移动机器人抗饱和控制方法中,抗饱和控制方法的被控对象为轮式移动机器人,轮式移动机器人的前轮为万向轮,轮式移动机器人的后轮为驱动轮。
在根据本发明的基于运动学的轮式移动机器人抗饱和控制方法中,轮式移动机器人的位姿为:
位姿向量q=[x y θ]
其中O为轮式移动机器人的几何中心点,θ是轮式移动机器人运动方向与X轴正向的夹角,用v和w分别表示轮式移动机器人前进时整体的线速度和角速度,也是轮式移动机器人运动学模型的输入,受执行器饱和约束;
受执行器饱和约束的轮式移动机器人的运动学方程为:
其中,|v|≤v
在根据本发明的基于运动学的轮式移动机器人抗饱和控制方法中,期望轮式移动机器人的位姿向量为:
q
其中,(x
可知轮式移动机器人位姿误差微分方程为:
在根据本发明的基于运动学的轮式移动机器人抗饱和控制方法中,抗饱和控制器为
式中
其中h>0为正常数,k
抗饱和控制器可分为两种情形;
情形一:当|f(e
情形二:当|f(e
记
对李亚普诺夫函数方程V
对于所述情形二,李亚普诺夫函数方程如下:
对李亚普诺夫函数方程V
令
对于h
由上述分析可知,本发明所述控制器存在两种情形,即使执行器出现饱和,依然能够收敛。本发明提供的一种基于运动学的轮式移动机器人抗饱和控制方法,能够保证轨迹跟踪控制稳定,有效抑制执行器饱和现象,充分利用执行器的驱动能力,增强轮式移动机器人的鲁棒性,还具有控制参数少,易于调节等特点。
具体的
为验证本发明提出的一种基于运动学的轮式移动机器人抗饱和控制方法的有效性,给出其数值仿真验证,说明基于运动学的轮式移动机器人抗饱和控制器是有效的,能够充分利用执行器的驱动能力并保证轨迹跟踪,具体如下:
本仿真中,轮式移动机器人期望的初始位姿为[10 5 π/2],期望的线速度
根据上述说明书的揭示和教导,本发明所属领域的技术人员还能够对上述实施方式进行变更和修改。因此,本发明并不局限于上述的具体实施方式,凡是本领域技术人员在本发明的基础上所作出的任何显而易见的改进、替换或变型均属于本发明的保护范围。此外,尽管本说明书中使用了一些特定的术语,但这些术语只是为了方便说明,并不对本发明构成任何限制。
- 一种基于运动学的轮式移动机器人抗饱和控制方法
- 一种基于预设性能的不确定非线性系统抗饱和容错控制方法