园区内车辆跨镜追踪方法及系统
文献发布时间:2023-06-19 09:52:39
技术领域
本发明涉及车辆追踪技术领域,特别涉及一种园区内车辆跨镜追踪方法及系统。
背景技术
目前的园区内车辆跨镜追踪方法主要是前端设备将识别的车辆结构化数据传给中心服务器。然而,这种方法的弊端在于,各个摄像头独立工作,不能系统性地工作。
发明内容
本发明提供一种园区内车辆跨镜追踪方法及系统,用以解决各摄像头无法系统工作的问题。
本发明提供了一种园区内车辆跨镜追踪方法,所述方法执行以下步骤:
步骤1:利用当前摄像头检测园区的监控视频,并从所述监控视频中提取目标追踪车辆的目标车辆特征信息;
步骤2:利用所述当前摄像头对所述目标追踪车辆进行单镜跟踪直至从所述当前摄像头的镜头中消失;
步骤3:在所述目标追踪车辆出现在新摄像头中时,对所述目标追踪车辆继续实施单镜跟踪,并以此方式循环,直至所述目标追踪车辆离开所述园区。
进一步地,所述方法还执行以下步骤:
步骤4:根据在所述目标追踪车辆离开所述园区之前,对所述目标追踪车辆进行单镜跟踪的多个摄像头所拍摄的监控视频,生成所述目标追踪车辆的历史轨迹。
进一步地,所述步骤4:根据在所述目标追踪车辆离开所述园区之前,对所述目标追踪车辆进行单镜跟踪的多个摄像头所拍摄的监控视频,生成所述目标追踪车辆的历史轨迹,执行以下步骤:
步骤A1:利用公式(1)根据所述当前摄像头拍摄的每一帧图像中的所述目标追踪车辆的位置坐标点,得到所述目标追踪车辆的瞬时速度;
其中V
步骤A2:利用公式(2)根据所述位置坐标点,得到所述目标追踪车辆从第i-1帧图像的位置坐标点移动到第i帧图像的位置坐标点的连线倾斜角;
其中θ
步骤A3:利用公式(3)根据所述目标追踪车辆从第i-1帧图像的位置坐标点移动到第i帧图像的位置坐标点的连线倾斜角以及所述目标追踪车辆在第i帧图像的位置坐标点,得到所述目标追踪车辆从第i-1帧图像的位置坐标点移动到第i帧图像的位置坐标点连线方程;
f(x)=tanθ(x-X
其中f(x)表示所述目标追踪车辆从第i-1帧图像的位置坐标点移动到第i帧图像的位置坐标点连线方程的纵坐标函数值;x表示所述目标追踪车辆从第i-1帧图像的位置坐标点移动到第i帧图像的位置坐标点连线方程的横坐标自变量;
步骤A4:根据公式(3)将所述目标追踪车辆从第i-1帧图像的位置坐标点与第i帧图像的位置坐标点进行连线,并在所述目标追踪车辆的第i帧图像的位置坐标点处标记所述第i帧图像的位置坐标点的瞬时速度;
步骤A5:对所有摄像头拍摄的每一帧图像重复执行步骤A1-步骤A4,完成所述目标追踪车辆的历史轨迹的绘制。
进一步地,所述步骤1:利用当前摄像头检测园区的监控视频,并从所述监控视频中提取目标追踪车辆的目标车辆特征信息,执行以下步骤:
步骤S11:在园区的所述多个摄像头中的某个摄像头所拍摄的监控视频中检测目标追踪车辆,并将检测到所述目标追踪车辆的摄像头作为当前摄像头;
步骤S12:对所检测的所述目标追踪车辆提取目标追踪车辆信息。
进一步地,所述目标车辆特征信息包括:车辆车牌、品牌、颜色、车辆类型、车辆速度中的至少一者。
进一步地,在所述步骤S11中,通过FasterRCNN、YOLO或SSD深度学习算法检测目标追踪车辆。
进一步地,所述步骤3:在所述目标追踪车辆出现在新摄像头中时,对所述目标追踪车辆继续实施单镜跟踪,执行以下步骤:
步骤S31:在新摄像头中重新出现车辆时,将所述新摄像头所拍摄的当前画面中的车辆特征信息与所述目标车辆特征信息进行比对,以确定所述新摄像头中的车辆与所述目标追踪车辆是否匹配;
步骤S32:若匹配,则利用所述新摄像头对所述目标追踪车辆继续实施单镜跟踪;
步骤S33:若不匹配,则重复执行步骤S31和步骤S32,直至在新摄像头中出现与所述目标追踪车辆相匹配的车辆,并利用所述新摄像头对所述目标追踪车辆继续实施单镜跟踪。
本发明实施例提供的一种园区内车辆跨镜追踪方法,具有以下有益效果:利用当前摄像头对目标追踪车辆进行单镜跟踪直至从当前摄像头的镜头中消失后,再利用新摄像头对目标追踪车辆继续实施单镜跟踪,直至目标追踪车辆离开园区,因此可以通过多个摄像头之间的系统性工作,实现园区内车辆的追踪。
本发明还提供一种园区内车辆跨镜追踪系统,包括:
目标追踪车辆检测模块,用于利用当前摄像头检测园区的监控视频,并从所述监控视频中提取目标追踪车辆的目标车辆特征信息;
第一单镜跟踪模块,用于利用当前摄像头对所述目标追踪车辆进行单镜跟踪直至从所述当前摄像头的镜头中消失;
循环单镜跟踪模块,用于在所述目标追踪车辆出现在新摄像头中时,对所述目标追踪车辆继续实施单镜跟踪,并以此方式循环,直至所述目标追踪车辆离开所述园区。
进一步地,所述园区内车辆跨镜追踪系统还包括:历史轨迹生成模块,用于根据在所述目标追踪车辆离开所述园区之前,对所述目标追踪车辆进行单镜跟踪的多个摄像头所拍摄的监控视频,生成所述目标追踪车辆的历史轨迹。
进一步地,所述目标追踪车辆检测模块包括:
目标追踪车辆检测单元,用于在园区的所述多个摄像头中的某个摄像头所拍摄的监控视频中检测目标追踪车辆,并将检测到所述目标追踪车辆的摄像头作为当前摄像头;
车辆信息提取单元,用于对所检测的所述目标追踪车辆提取目标追踪车辆信息。
本发明实施例提供的一种园区内车辆跨镜追踪系统,具有以下有益效果:第一单镜跟踪模块利用当前摄像头对目标追踪车辆进行单镜跟踪直至从当前摄像头的镜头中消失后,循环单镜跟踪模块再利用新摄像头对目标追踪车辆继续实施单镜跟踪,直至目标追踪车辆离开园区,因此可以通过多个摄像头之间的系统性工作,实现园区内车辆的追踪。
本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
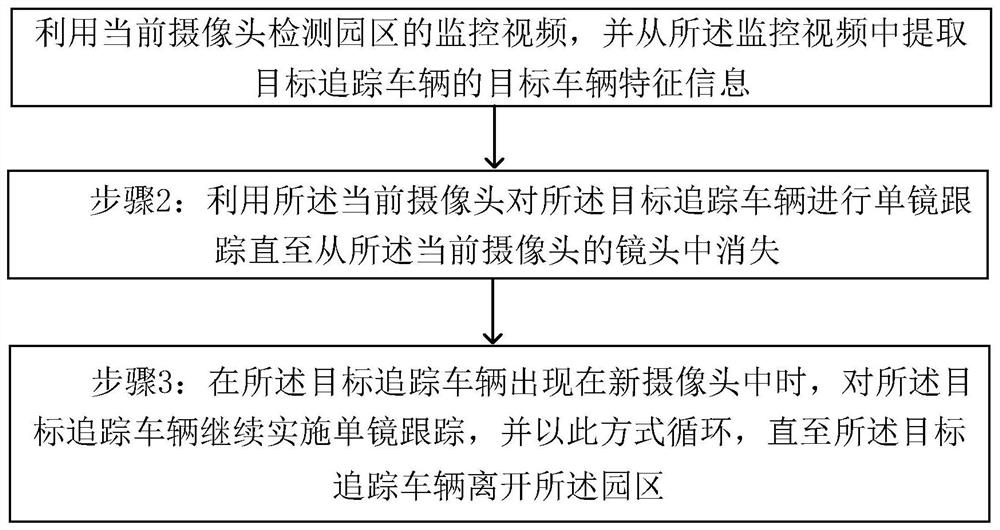
图1为本发明实施例中一种园区内车辆跨镜追踪方法的流程示意图;
图2为本发明实施例中一种园区内车辆跨镜追踪系统的框图。
具体实施方式
以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
本发明实施例提供了一种园区内车辆跨镜追踪方法,如图1所示,所述方法执行以下步骤:
步骤1:利用当前摄像头检测园区的监控视频,并从所述监控视频中提取目标追踪车辆的目标车辆特征信息;
步骤2:利用所述当前摄像头对所述目标追踪车辆进行单镜跟踪直至从所述当前摄像头的镜头中消失;
步骤3:在所述目标追踪车辆出现在新摄像头中时,对所述目标追踪车辆继续实施单镜跟踪,并以此方式循环,直至所述目标追踪车辆离开所述园区。
上述技术方案的工作原理为:本发明采用多个摄像头进行系统性地协同工作,实现目标追踪车辆在整个园区内的追踪,具体地,首先,利用当前摄像头检测园区的监控视频,并从所述监控视频中提取目标追踪车辆的目标车辆特征信息;然后,利用当前摄像头对目标追踪车辆进行单镜跟踪直至从当前摄像头的镜头中消失;最后,在目标追踪车辆出现在新摄像头中时,对目标追踪车辆继续实施单镜跟踪,并以此方式循环,直至目标追踪车辆离开所述园区。
其中,单镜跟踪的含义是指仅利用当前摄像头对目标追踪车辆进行拍摄,以对目标追踪车辆进行跟踪,直至目标追踪车辆从当前摄像头的镜头中消失。需要说明的是,所述园区可以是物流园区、校园、办公区、小区等。
上述技术方案的有益效果为:利用当前摄像头对目标追踪车辆进行单镜跟踪直至从当前摄像头的镜头中消失后,再利用新摄像头对目标追踪车辆继续实施单镜跟踪,直至目标追踪车辆离开园区,因此可以通过多个摄像头之间的系统性工作,实现园区内车辆的追踪。
在一个实施例中,所述方法还执行以下步骤:
步骤4:根据在所述目标追踪车辆离开所述园区之前,对所述目标追踪车辆进行单镜跟踪的多个摄像头所拍摄的监控视频,生成所述目标追踪车辆的历史轨迹。
上述技术方案的工作原理为:根据对目标追踪车辆进行单镜跟踪的多个摄像头所拍摄的监控视频,生成目标追踪车辆的历史轨迹。
上述技术方案的有益效果为:生成目标追踪车辆的历史轨迹,便于对目标追踪车辆进行全程追踪。
在一个实施例中,所述步骤1:利用当前摄像头检测园区的监控视频,并从所述监控视频中提取目标追踪车辆的目标车辆特征信息,执行以下步骤:
步骤S11:在园区的所述多个摄像头中的某个摄像头所拍摄的监控视频中检测目标追踪车辆,并将检测到所述目标追踪车辆的摄像头作为当前摄像头;
步骤S12:对所检测的所述目标追踪车辆提取目标追踪车辆信息。
上述技术方案的工作原理为:所述目标车辆特征信息包括:车辆车牌、品牌、颜色、车辆类型、车辆速度中的至少一者。
在所述步骤S11中,通过FasterRCNN、YOLO或SSD深度学习算法检测目标追踪车辆。
上述技术方案的有益效果为:提供了利用当前摄像头检测园区的监控视频,并从所述监控视频中提取目标追踪车辆的目标车辆特征信息的具体步骤。
在一个实施例中,所述步骤3:在所述目标追踪车辆出现在新摄像头中时,对所述目标追踪车辆继续实施单镜跟踪,执行以下步骤:
步骤S31:在新摄像头中重新出现车辆时,将所述新摄像头所拍摄的当前画面中的车辆特征信息与所述目标车辆特征信息进行比对,以确定所述新摄像头中的车辆与所述目标追踪车辆是否匹配;
步骤S32:若匹配,则利用所述新摄像头对所述目标追踪车辆继续实施单镜跟踪;
步骤S33:若不匹配,则重复执行步骤S31和步骤S32,直至在新摄像头中出现与所述目标追踪车辆相匹配的车辆,并利用所述新摄像头对所述目标追踪车辆继续实施单镜跟踪。
上述技术方案的工作原理为:在新摄像头中重新出现车辆时,将该新摄像头所拍摄的当前画面中的车辆特征信息与之前检测的目标车辆特征信息进行比对,以此来确定出现在新摄像头中的车辆与目标追踪车辆是否匹配;若匹配,则认为出现在新摄像头中的车辆即为目标追踪车辆,此时利用该新摄像头对目标追踪车辆继续实施单镜跟踪;若不匹配,则认为出现在新摄像头中的车辆不是目标追踪车辆,此时继续在其他摄像头中寻找车辆,并判断其与目标追踪车辆是否匹配,直至在新摄像头中出现与目标追踪车辆相匹配的车辆,并利用新摄像头对所述目标追踪车辆继续实施单镜跟踪。
上述技术方案的有益效果为:提供了在目标追踪车辆出现在新摄像头中时,对目标追踪车辆继续实施单镜跟踪的具体步骤。
在一个实施例中,所述步骤4:根据在所述目标追踪车辆离开所述园区之前,对所述目标追踪车辆进行单镜跟踪的多个摄像头所拍摄的监控视频,生成所述目标追踪车辆的历史轨迹,执行以下步骤:
步骤A1:利用公式(1)根据所述当前摄像头拍摄的每一帧图像中的所述目标追踪车辆的位置坐标点,得到所述目标追踪车辆的瞬时速度;
其中V
步骤A2:利用公式(2)根据所述位置坐标点,得到所述目标追踪车辆从第i-1帧图像的位置坐标点移动到第i帧图像的位置坐标点的连线倾斜角;
其中θ
步骤A3:利用公式(3)根据所述目标追踪车辆从第i-1帧图像的位置坐标点移动到第i帧图像的位置坐标点的连线倾斜角以及所述目标追踪车辆在第i帧图像的位置坐标点,得到所述目标追踪车辆从第i-1帧图像的位置坐标点移动到第i帧图像的位置坐标点连线方程;
f(x)=tanθ(x-X
其中f(x)表示所述目标追踪车辆从第i-1帧图像的位置坐标点移动到第i帧图像的位置坐标点连线方程的纵坐标函数值;x表示所述目标追踪车辆从第i-1帧图像的位置坐标点移动到第i帧图像的位置坐标点连线方程的横坐标自变量;
步骤A4:根据公式(3)将所述目标追踪车辆从第i-1帧图像的位置坐标点与第i帧图像的位置坐标点进行连线,并在所述目标追踪车辆的第i帧图像的位置坐标点处标记所述第i帧图像的位置坐标点的瞬时速度;
步骤A5:对所有摄像头拍摄的每一帧图像重复执行步骤A1-步骤A4,完成所述目标追踪车辆的历史轨迹的绘制。
上述技术方案的有益效果是:利用步骤A1中的公式(1)得到目标追踪车辆的瞬时速度,从而得到目标追踪车辆的历史轨迹中每一帧的速度情况;然后再利用步骤A2的公式(2)得到目标追踪车辆从第i-1帧的位置坐标点移动到第i帧的位置坐标点的连线倾斜角,目的是根据倾斜角得到绘制目标追踪车辆从第i-1帧的位置坐标点移动到第i帧的位置坐标点的连线的直线方程;然后利用步骤A3中的公式(3)得到目标追踪车辆从第i-1帧的位置坐标点移动到第i帧的位置坐标点连线方程,从而根据方程以及目标追踪车辆的瞬时速度完成对目标追踪车辆的历史轨迹的绘制;从而使绘制的轨迹更加详细具体,并且反映出的历史轨迹更加准确真实。
如图2所示,本发明实施例提供了一种园区内车辆跨镜追踪系统,包括:
目标追踪车辆检测模块201,用于利用当前摄像头检测园区的监控视频,并从所述监控视频中提取目标追踪车辆的目标车辆特征信息;
第一单镜跟踪模块202,用于利用当前摄像头对所述目标追踪车辆进行单镜跟踪直至从所述当前摄像头的镜头中消失;
循环单镜跟踪模块203,用于在所述目标追踪车辆出现在新摄像头中时,对所述目标追踪车辆继续实施单镜跟踪,并以此方式循环,直至所述目标追踪车辆离开所述园区。
上述技术方案的工作原理为:本发明采用多个摄像头进行系统性地协同工作,实现目标追踪车辆在整个园区内的追踪,具体地,目标追踪车辆检测模块201利用当前摄像头检测园区的监控视频,并从所述监控视频中提取目标追踪车辆的目标车辆特征信息;第一单镜跟踪模块202利用当前摄像头对目标追踪车辆进行单镜跟踪直至从当前摄像头的镜头中消失;循环单镜跟踪模块203在目标追踪车辆出现在新摄像头中时,对目标追踪车辆继续实施单镜跟踪,并以此方式循环,直至目标追踪车辆离开所述园区。
上述技术方案的有益效果为:第一单镜跟踪模块利用当前摄像头对目标追踪车辆进行单镜跟踪直至从当前摄像头的镜头中消失后,循环单镜跟踪模块再利用新摄像头对目标追踪车辆继续实施单镜跟踪,直至目标追踪车辆离开园区,因此可以通过多个摄像头之间的系统性工作,实现园区内车辆的追踪。
在一个实施例中,所述园区内车辆跨镜追踪系统还包括:历史轨迹生成模块204,用于根据在所述目标追踪车辆离开所述园区之前,对所述目标追踪车辆进行单镜跟踪的多个摄像头所拍摄的监控视频,生成所述目标追踪车辆的历史轨迹。
上述技术方案的工作原理为:历史轨迹生成模块204根据对目标追踪车辆进行单镜跟踪的多个摄像头所拍摄的监控视频,生成目标追踪车辆的历史轨迹。
上述技术方案的有益效果为:借助于历史轨迹生成模块,可以生成目标追踪车辆的历史轨迹,便于对目标追踪车辆进行全程追踪。
在一个实施例中,所述目标追踪车辆检测模块201包括:
目标追踪车辆检测单元,用于在园区的所述多个摄像头中的某个摄像头所拍摄的监控视频中检测目标追踪车辆,并将检测到所述目标追踪车辆的摄像头作为当前摄像头;
车辆信息提取单元,用于对所检测的所述目标追踪车辆提取目标追踪车辆信息。
上述技术方案的工作原理为:所述目标车辆特征信息包括:车辆车牌、品牌、颜色、车辆类型、车辆速度中的至少一者。
所述目标追踪车辆检测单元通过FasterRCNN、YOLO或SSD深度学习算法检测目标追踪车辆。
上述技术方案的有益效果为:借助于目标追踪车辆检测单元和车辆信息提取单元,可以用当前摄像头检测园区的监控视频中的目标追踪车辆并提取目标车辆特征信息。
在一个实施例中,所述循环单镜跟踪模块203包括:
车辆特征信息比对单元,用于在新摄像头中重新出现车辆时,将所述新摄像头所拍摄的当前画面中的车辆特征信息与所述目标车辆特征信息进行比对,以确定所述新摄像头中的车辆与所述目标追踪车辆是否匹配;
新摄像头单镜跟踪单元,用于在所述新摄像头中的车辆与所述目标追踪车辆匹配的情况下,利用所述新摄像头对所述目标追踪车辆继续实施单镜跟踪;
匹配重复执行单元,用于在所述新摄像头中的车辆与所述目标追踪车辆不匹配的情况下,重复利用所述车辆特征信息比对单元和所述第二单镜跟踪单元,在新摄像头中发现与所述目标追踪车辆相匹配的车辆,并利用所述新摄像头对所述目标追踪车辆继续实施单镜跟踪。
上述技术方案的工作原理为:在新摄像头中重新出现车辆时,车辆特征信息比对单元将该新摄像头所拍摄的当前画面中的车辆特征信息与之前检测的目标车辆特征信息进行比对,以此来确定出现在新摄像头中的车辆与目标追踪车辆是否匹配;若匹配,则认为出现在新摄像头中的车辆即为目标追踪车辆,此时新摄像头单镜跟踪单元利用该新摄像头对目标追踪车辆继续实施单镜跟踪;若不匹配,则认为出现在新摄像头中的车辆不是目标追踪车辆,此时匹配重复执行单元继续在其他摄像头中寻找车辆,并判断其与目标追踪车辆是否匹配,直至在新摄像头中出现与目标追踪车辆相匹配的车辆,并利用新摄像头对所述目标追踪车辆继续实施单镜跟踪。
上述技术方案的有益效果为:借助于车辆特征信息比对单元、新摄像头单镜跟踪单元和匹配重复执行单元,可以在目标追踪车辆出现在新摄像头中时,对目标追踪车辆继续实施单镜跟踪。
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
- 园区内车辆跨镜追踪方法及系统
- 跨镜行人轨迹追踪的方法、系统、电子装置和存储介质