一种基于功率的仿真雷达目标模拟方法
文献发布时间:2023-06-19 09:54:18
技术领域
本发明涉及雷达干扰技术领域,特别是一种基于功率的仿真雷达目标模拟方法。
背景技术
现代战争中,雷达占据着不可或缺的地位。欺骗性干扰通过发射干扰信号,采用假的目标参数作用于雷达系统,以假乱真,可以使雷达不能正确地检测真正的目标参数,从而达到迷惑和扰乱敌方雷达、保护我方目标的目的。
目前的欺骗性干扰主要从距离(转发延时)、速度(多普勒频移)等参数对雷达进行干扰,而鲜有对干扰功率的欺骗性调节,这与真实目标的回波功率特性是截然不同的,显然会降低干扰的欺骗效果。刘聪锋等人提出了一种欺骗干扰信号发射功率估计方法,但没有考虑到目标的起伏特性,而且涉及到一些难以准确测算的参数,实现难度较大。
发明内容
本发明的目的在于提供一种干扰信号的功率变化趋近于真实目标的回波功率特性、干扰的欺骗效果好、易于实现的仿真雷达目标模拟方法。
实现本发明目的的技术解决方案为:一种基于功率的仿真雷达目标模拟方法,包括以下步骤:
步骤1、根据仿真雷达目标的参数特性,通过转发延时或多普勒频移方法生成欺骗性干扰信号S
步骤2、根据仿真雷达目标的运动距离特性和目标起伏模型估算幅度调节因子α
步骤3、根据幅度调节因子α
进一步地,步骤2所述的根据仿真雷达目标的运动距离特性和目标起伏模型估算幅度调节因子α
步骤2.1、根据仿真雷达目标的运动距离特性估算距离调节因子α
其中,R′是为仿真雷达目标与雷达的实时距离,R是为雷达与干扰机的距离;
如果雷达与干扰机的距离无法测算,则将R′置为仿真雷达目标与干扰机的实时距离,R置为仿真雷达目标与干扰机的初始距离;
步骤2.2、根据目标起伏模型估算起伏调节因子α
步骤2.3、估算幅度调节因子,公式为:
α
其中,α为常数,根据实际应用进行调节。
本发明与现有技术相比,的有益效果在于:(1)根据仿真雷达目标的具体特性引入了幅度调节因子,对干扰信号发射功率进行调制,使干扰信号的功率变化趋近于真实目标的回波功率特性,提高了干扰的欺骗效果;(2)在引入幅度调节因子时,只需根据仿真雷达目标的自身特性即可实时估算,方法简单,易于实现。
附图说明
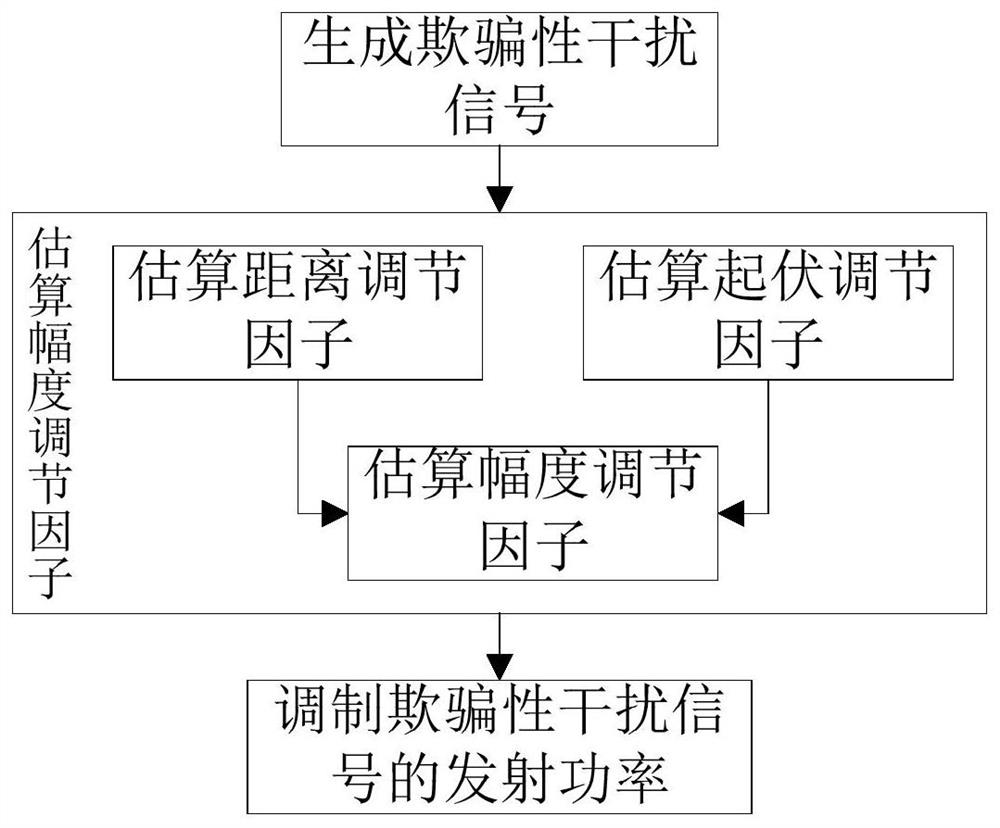
图1是本发明一种基于功率的仿真雷达目标模拟方法的流程示意图。
图2是本发明实施例中某仿真雷达目标的实现流程示意图。
具体实施方式
下面将结合附图和具体实施例对本发明作进一步的详细地说明。
结合图1,本发明一种基于功率的仿真雷达目标模拟方法,包括以下步骤:
步骤1、根据仿真雷达目标的参数特性,通过转发延时或多普勒频移方法生成欺骗性干扰信号S
步骤2、根据仿真雷达目标的运动距离特性和目标起伏模型估算幅度调节因子α
步骤3、根据幅度调节因子α
进一步地,步骤2所述的根据仿真雷达目标的运动距离特性和目标起伏模型估算幅度调节因子α
步骤2.1、根据仿真雷达目标的运动距离特性估算距离调节因子α
其中,R′是为仿真雷达目标与雷达的实时距离,R是为雷达与干扰机的距离;
如果雷达与干扰机的距离无法测算,则将R′置为仿真雷达目标与干扰机的实时距离,R置为仿真雷达目标与干扰机的初始距离;
步骤2.2、根据目标起伏模型估算起伏调节因子α
步骤2.3、估算幅度调节因子,公式为:
α
其中,α为常数,根据实际应用进行调节。
实施例1
结合图2,本实施例目标起伏模型为Swerling II型,具体包括以下步骤:
步骤1、根据仿真雷达目标的参数特性,通过现有方法(如转发延时、多普勒频移等)生成欺骗性干扰信号S
生成的欺骗性干扰信号是对采集到的雷达信号进行处理得到的,例如,可以通过对采集到的雷达脉冲信号进行延时发射来进行距离欺骗,对采集到的雷达脉冲信号进行移频来进行速度欺骗。具体的生成方法可以根据实际应用进行选择,其中的干扰信号参数根据仿真雷达目标参数进行设置。
步骤2、根据仿真雷达目标的运动距离特性和目标起伏模型估算幅度调节因子α
步骤2.1、根据仿真雷达目标的运动距离特性估算距离调节因子,公式为:
其中,R′是为仿真雷达目标与雷达的实时距离,R是为雷达与干扰机的距离;如果雷达与干扰机的距离无法测算,则将R′可置为仿真雷达目标与干扰机的实时距离,R可置为仿真雷达目标与干扰机的初始距离。
在实现时,利用定时器计算时间,从而得到仿真目标与干扰机(或雷达)的实时距离特性。仿真雷达目标静止时,距离不变;仿真雷达目标运动时,可以根据仿真雷达目标的速度与加速度计算运动距离,其中定时器的精度需要根据功率进行调节。
步骤2.2、根据目标起伏模型估算起伏调节因子α
在实现时同样需要定时器,可以和步骤2.1共用。如起伏模型为Swerling II型时,可以先在定时器下生成服从均匀分布U(0,1)的随机序列u
步骤2.3、估算幅度调节因子,公式为:
α
其中,α是常数,可以根据实际应用进行调节。
步骤3、根据幅度调节因子α
在实现时,需要捕获步骤2得到的幅度调节因子,如仿真雷达目标为快起伏,则在每个脉冲捕获一次;如为慢起伏,则在若干个脉冲时间内捕获一次。
在功率调制的方式上,可以对生成的欺骗性干扰信号的幅度直接进行数字调节,也可以对生成的欺骗性干扰信号的功率进行模拟调节。
- 一种基于功率的仿真雷达目标模拟方法
- 一种基于多元矢量合成的多散射点雷达目标模拟方法