自动接线装置和具有其的工程车辆、带电作业机器人
文献发布时间:2023-06-19 09:55:50
技术领域
本发明涉及电网维护领域,特别是涉及一种自动接线装置和具有其的工程车辆、带电作业机器人。
背景技术
配网不停电作业指以实现用户不中断供电为目的,采用带电作业、旁路作业等方式对配网设备进行检修的作业方式。带电作业是直接在带电的线路或设备上作业;旁路作业是先对用户采用旁路或移动电源等方法连续供电,再将线路或设备停电进行作业。通过推广开展配网带电作业,不仅提高了供电可靠性和客户满意度,也为企业带来可观的经济效益和社会效益。配电带电作业是提高供电可靠性的直接手段,可以大程度减少停电时间,提升供电可靠性,但是配电带电作业具有一定危险性,劳动强度高,对作业人员需要专业的技能要求。目前带电作业主要仍是人工操作,亟需通过采用机器人技术使操作人员远离危险环境,保障作业人员安全,减轻劳动强度,提高工作效率本项目配网架空线路实际作业情况,拟在以下方面开展相关关键技术专题研究。
许多国家都先后开展了配网带电作业机器人的研究,如日本、西班牙、美国、加拿大、意大利等国家先后开展了对配网带电作业机器人的研究。国网青岛供电公司作业人员正在操控配电带电作业机器人“特种兵”实施10千伏线路消缺作业。作业人员通过隔屏指挥,带电作业机器人的“眼睛”与无人机摄像头所拍摄的画面实时传输至电脑屏幕上,用时20分钟,带电作业机器人就已完成带电处理配电线路设备缺陷工作。带电作业机器人包括控制力反馈机械臂、机器人作业专用工具、升降平台系统和绝缘防护的智能系统。该机器人可以替代人工完成作业频率较高的剥皮作业、带电断接引流线、清除异物、带电更换跌落式熔断器、修剪树枝等作业任务。作业人员在地面进行远程操作,实现了间接作业,降低了作业人员触电、高空坠落等危险事故的发生,有效减轻作业人员的劳动强度,大限度的保证作业人员的安全。
此外,市场上还出现了一种用于接线的引流器(又名熔断器或者穿刺管夹),引流器采用导电材料制成,包括第一安装空间和第二安装空间,在第一安装空间中设置有用于穿刺电线绝缘层的穿刺部,供电主线容置在第一安装空间中,引流线则容置在第二安装空间中,引流器上还设置有与第一安装空间对应的第一螺钉和与第二安装空间对应的第二螺钉,通过旋拧螺钉使其与供电线和引流线抵接,并使穿刺部穿透绝缘层与内部导体接触,由此可实现供电主线与引流线的导通。在引流器的安装过程中不需要对供电主线进行剥皮处理,但是只能通过人工安装,危险性极高。
发明内容
本发明提供一种自动接线装置和具有其的工程车辆、带电作业机器人,可解决现有引流器需要人工安装危险性高的问题。
本发明的技术解决方案为一种自动接线装置,包括:
安装架;
第一拨线机构,用于将供电主线拨入第一安装空间中,所述第一拨线机构包括与所述安装架铰接的第一拨线件以及驱动所述第一拨线件摆动的第一驱动件;
第二拨线机构,用于将引流线拨入第二安装空间中,所述第二拨线机构包括与所述安装架铰接的第二波线件以及驱动所述第二拨线件摆动的第二驱动件;
第一旋拧机构,用于将所述供电主线固定在所述第一安装空间中;
第二旋拧机构,用于将所述引流线固定在所述第二安装空间中;
驱动机构,用于驱动所述第一旋拧机构和第二旋拧机构运动。
优选地,所述第一拨线件和第二拨线件交叉设置,二者朝向所述引流器设置;所述第一拨线件的上设置有与所述第一安装空间对应的第一凹槽;所述第二拨线件的上设置有与所述第二安装空间对应的第二凹槽。
优选地,所述自动接线装置还包括第三拨线机构,所述第三拨线机构包括:
第三拨线件,铰接设置在所述安装架上,并与所述第二拨线件交叉设置,所述第三拨线件用于将所述引流线拨入所述第二凹槽中;
第一连杆,一端与所述第三拨线件远离所述引流器的一端铰接,另一端与所述第一拨线件远离所述引流器的一端铰接。
优选地,所述第一旋拧机构,包括与所述安装架转动连接的第一转筒,以及与所述第一转筒连接的第一转轴,所述第一转筒用于与设置在所述引流器上的第一螺钉对接;
第二旋拧机构,包括与所述安装架转动连接的第二转筒,以及与所述第二转筒连接的第二转轴,所述第二转筒用于与设置在所述引流器上的第二螺钉对接。
优选地,所述自动接线装置还包括传动机构,所述传动机构包括:
主动齿轮,设置在所述驱动机构的输出端;
第一从动齿轮,设置在所述第一转轴上并与所述主动齿轮适配;
第二从动齿轮,设置在所述第二转轴上并与所述主动齿轮适配。
优选地,所述驱动机构包括驱动马达,所述自动接线装置还包括第一过载保护机构和/或第二过载保护机构;所述第一过载保护机构连接所述第一转轴和第一转筒,所述第二过载保护机构连接所述第二转轴和第二转筒。
优选地,所述第一过载保护机构包括:
连接套,连接所述第一转轴和第一转筒;
凹腔,设置在所述第一转轴的圆弧外壁;
容置孔,设置在所述连接套上;
弹性件,设置在所述容置孔中,且一端与容置孔的底部抵接;
球体,与所述弹性件靠近所述凹腔的一端抵接;
在锁定状态下,所述凹腔和容置孔对接,所述球体位于所述凹腔中,用于固定连接所述凹腔和容置孔;在非锁定状态下,所述球体脱离所述凹腔。
优选地,所述自动接线装置还包括固定机构,所述固定机构用于限制所述引流器脱离所述安装架。
优选地,所述固定机构包括设置在所述安装架上的夹紧驱动件以及设置在所述夹紧驱动件上的夹板,所述夹紧驱动件用于驱动所述夹板夹持所述引流器。
本发明还提出一种工程车辆,具有上述的自动接线装置,所述自动接线装置设置在所述工程车辆的机械臂或升降装置上。
本发明还提出一种带电作业机器人,具有上述的自动接线装置。
本发明设置了包括安装架、第二拨线机构第一旋拧机构、第二旋拧机构和驱动机构的自动接线装置,其中,先将供电主线与第一安装空间对接,第二拨线机构用于将引流线拨入第二安装空间中,第一旋拧机构用于将所述供电主线固定在所述第一安装空间中,第二旋拧机构用于将所述引流线固定在所述第二安装空间中,驱动机构用于驱动第一旋拧机构和第二旋拧机构运动。通过第二拨线机构、第一旋拧机构、第二旋拧机构和驱动机构的配合工作可将实现供电主线与引流线的自动电连,无需操作人员靠近高压供电进行作业。
附图说明
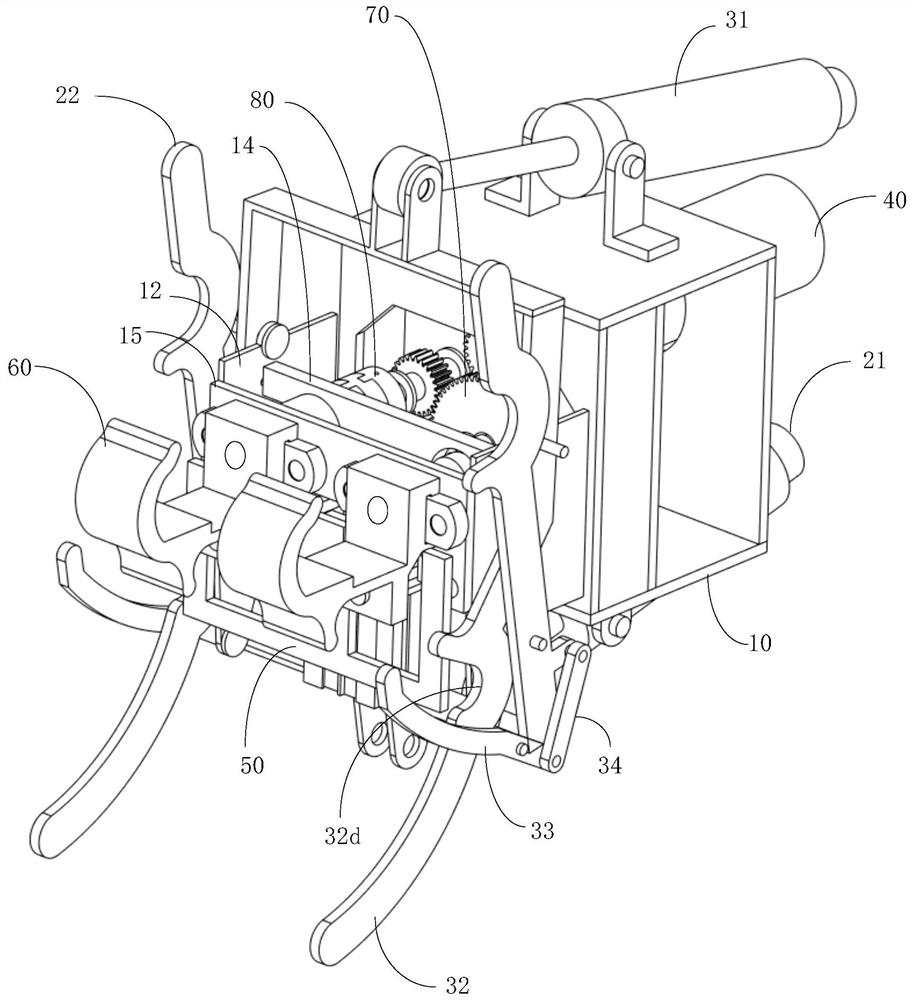
图1为自动接线装置一实施例的结构示意图;
图2为图1实施例中固定机构的结构示意图;
图3为图1实施例中第一旋拧机构和第二旋拧机构的结构示意图;
图4为图1实施例中第一拨线件的结构示意图;
图5为图1实施例中驱动机构和传动机构的结构示意图;
图6为图1实施例中第一过载保护机构的机构示意图;
图7为图1实施例中安装座的结构示意图。
具体实施方式
实施例1
本发明提出一种自动接线装置,参照图1至图7,该自动接线装置用于对引流器60进行自动安装,其中引流器60为金属材质,包括基板61、设置在基板61上的承接板62、自承接板62的自由端向两侧延伸的第一延伸部63和第二延伸部64、设置在第一延伸部63和与基板61相对的一侧面的穿刺部(图中未示出)、设置在基板61上并与第一延伸部63和第二延伸部64相对的螺孔、设置在螺孔中与第一延伸部63对应的第一螺钉65、设置在螺孔中与第二延伸部64对应的第二螺钉66。由此,基板61、承接板62第一延伸部63构造成了安装供电主线的第一安装空间,基板61、承接板62第二延伸部64构造成了安装引流线的第二安装空间,基板61上还设置有用于与安装架连接的安装孔以及供第一螺钉65和第二螺钉66通过的通孔。
在本实施例中,参照图3,安装架10包括框型架体11、设置在框型架体11一侧的两相对的侧板12以及设置在两侧板12远离所述框型架体11一端的安装座。参照图7,安装座包括连接两侧板12的安装板15a和设置在安装板15a上的限位结构,此处限位结构优选销体15d,销体15d与引流器60上的安装孔适配,销体15d带有一定锥度,使引流器60可卡在销体15d上不易脱落。
参照图1、图4和图5,第一拨线机构包括与所述安装架10铰接的第一拨线件22以及驱动所述第一拨线件22摆动的第一驱动件21。具体的,所述第一拨线件22和第二拨线件32外形为叉状,第一拨线件22包括两相对设置的第一叉脚22a、连接两第一叉脚22a的连接件22b、设置在连接件22b远离第一叉脚22a的一面的铰接座22c;对应第二拨线件32包括两相对设置的第二叉脚32a。第一叉脚22a与第二叉脚32a交叉设置,第一叉脚22a与侧板12铰接,第二叉脚32a与侧板12铰接,引流器60位于第一叉脚22a和第二叉脚32a之间。第一安装空间与第一叉脚22a相对,第二安装空间与第二叉脚32a相对。
为方便供电主线和引流线装入接线器上,第一叉脚22a上设置有与所述第一安装空间对应的第一凹槽22d;第二叉脚32a上设置有与所述第二安装空间对应的第二凹槽32d。第一凹槽22d与供电主线适配、第二凹槽32d与引流线适配,在拨线过程中可避免供电主线和引流线脱离第一叉脚22a和第二叉脚32a,当供电主线和引流线进入安装空间中,第一驱动件21驱动第一拨线件22覆压在供电主线上,供电主线限制在第一凹槽22d和第一安装空间之间,进一步防止供电主线的脱离。第二驱动件31驱动第二拨线件32覆压在引流线上,引流线限制在第二凹槽32d和第二安装空间之间,进一步防止引流线的脱离。
在本实施例中,参照图1,第一驱动件21和第二驱动件31可以是油缸、气缸和电动缸。其中,第一驱动件21的缸体铰接设置在框型架体11的底部,其推杆与第一拨线件22的铰接座22c连接。第二驱动件31的缸体则铰接设置在框型架体11的顶部,其推杆与第二拨线件32的铰接座连接。由此可见驱动第一拨线件22和第二拨线件32进行交叉摆动。二者的自由端的角度减小的摆动可将目标导线拨入对应的安装空间中。
在本实施例中,参照图3和图5,框型架体11内部设置有与安装板15a平行的第一固定板13,第一固定板13与框型架体11的一平行的面板11a,构造成安装传动机构70的容置空间。第一固定板13远离引流器60的一面设置有驱动马达,驱动马达可以采用电动和气动等驱动方式,其主轴贯穿第一固定板13设置。第一转轴81贯穿面板11a和第一固定板13设置并与面板11a和第一固定板13转动连接,第一转轴81与基板61上的第一螺钉65同轴。第二转轴91贯穿面板11a和第一固定板13设置并与面板11a和第一固定板13转动连接,第二转轴91与基板61上的第二螺钉66同轴。传动机构70包括设置在驱动马达上的主轴上的主动齿轮71、设置在所述第一转轴81上的第一从动齿轮72、设置在所述第二转轴91上的第二从动齿轮73,主动齿轮71和从动齿轮之间直接啮合,也可不直接啮合,通过在主动齿轮71和从动齿轮之间设置减速齿轮或齿轮组达到降低第一转轴81和第二转轴91的转速增大扭矩的作用。
值得注意的是,本实施例中也可采用其他传动机构70进行传动,如链轮传动机构。链轮代替齿轮,并通过链条连接。此外也可无需传动机构70,设置主轴与第一转轴81和第二转轴91直接连接的两个驱动马达,第一转轴81和第二转轴91由驱动马达分别驱动。
在本实施例中,参照图3和图5,安装板15a和面板11a之间还设置有第二固定板14,第一转筒83与第二固定板14转动连接,其中,第一转筒83的一端与第一转轴81连接,另一端与第一螺钉65对接,第一转筒83的内部设置有与第一螺钉65的螺钉头适配的限位孔。第二转筒93的一端与第二转轴91连接,另一端与第二螺钉66对接,第二转筒93的内部设置有与第二螺钉66的螺钉头适配的限位孔。值得注意的是,安装板15a上也可设置有与第一转筒83和第二转筒93转动连接的通孔。第一转筒83和第二转筒93上也可设置与第二固定板14对应的限位台阶,防止其脱落。第一转筒83和第二转筒93才用绝缘材料轴承制成。
本发明设置了包括安装架10、第一拨线机构、第二拨线机构、第一旋拧机构80、第二旋拧机构90和驱动机构40的自动接线装置,其中,第一拨线机构用于将供电主线拨入第一安装空间中,第二拨线机构用于将引流线拨入第二安装空间中,第一旋拧机构80用于将所述供电主线固定在所述第一安装空间中,第二旋拧机构90用于将所述引流线固定在所述第二安装空间中,驱动机构40,用于驱动第一旋拧机构80和第二旋拧机构90运动。具体的,先通过第二拨线机构将引流线自动限制在第二安装空间中,再通过外部的伸缩臂或升降装置使引流线自动接线装置靠近供电主线,使供电主线位于第一拨线件的摆动范围内,第一驱动件驱动第一拨线件将供电主线扣入第一安装空间。最后驱动机构驱动第一旋拧机构和第二旋拧机构转动,使螺钉分别抵接供电主线和引流线,由此二者被固定在引流器中,第一螺钉旋拧过程中,推动供电主线朝向穿刺部运动,穿刺部穿透绝缘层与供电主线的内导体接通,由于引流线与引流器接触区域可预先剥除绝缘层,由此当供电主线和引流线固定在引流器上时可实现自动电连,无需操作人员靠近高压供电进行作业。
实施例2
在本实施例中,参照图5和图6,自动接线装置还包括第一过载保护机构和/或第二过载保护机构;所述第一过载保护机构连接所述第一转轴81和第一转筒83,所述第二过载保护机构连接所述第二转轴91和第二转筒93。第一过载保护机构和第二过载保护机构的结构相同,在此至对第一过载保护机构进行展开描述。
第一过载保护机构包括连接套85、凹腔89、容置孔86、球体88和弹性件87。连接套85设置在第一转筒83靠近第一转轴81的一端,并与第一转轴81套接。凹腔89设置在所述第一转轴81的圆弧外壁,可视为球心在圆弧外壁外的半球形的凹坑,该凹坑与球体88适配。容置孔86则设置在所述连接套85上,可用于容置球体88和弹性件87。弹性件87设置在所述容置孔86中,且一端与容置孔86的底部抵接,球体88则与所述弹性件87靠近所述凹腔89的一端抵接。在锁定状态下,所述凹腔89和容置孔86对接,所述球体88一端位于所述凹腔89中,另一端位于容置孔86的孔口处,球体88用于固定连接所述凹腔89和容置孔86,用于将第一转轴81上的力矩传递至第一转筒83。在非锁定状态下,由于驱动马达过载或第一螺钉65和第二螺钉66已经旋钮到位,力矩激增的情况下,在连接套85和第一转轴81之间的剪切力作用下,球体88会脱离所述凹腔89进入容置孔86中,接套和第一转轴81之间的力矩传递断开,实现限制扭矩的作用。在本实施例中,第一转筒83和第二转筒93才用绝缘材料轴承制成,安装套和第一转轴81第二转轴91采用金属材料制成。
实施例3
在本实施例中,参照图2,自动接线装置还包括固定机构50,所述固定机构50包括设置在所述安装架10上的夹紧驱动件52以及设置在所述夹紧驱动件52上的夹板54,所述夹紧驱动件52用于驱动所述夹板54夹持所述引流器60。具体的,夹紧驱动件52可以是电动缸、液压缸或气缸,安装架10的面板11a上设置有一连接板51,其缸体固定设置在连接板51上,推杆的驱动方向沿着竖直方向设置。夹板54平行于安装板15a设置,并与推杆连接。在非夹持状态下,基板61与销体15d适配,夹板54远离基板61。在夹持状态下,夹板54运动至基板61的一侧,使基板61位于夹板54与安装板15a之间,由此可限制引流器60从销体15d上脱离。在未设置固定机构50时,仅靠引流器60与销体15d等限位机构等之间的摩擦力实现对引流器60的固定,其固定效果较差,引流器60在外力的作用下容易脱落。通过设置固定机构50,在引流器60的安装过程中,可防止引流器60脱落;在引流线安装完毕后,夹板54下行,引流器60处于非夹持状态,便于与自动接线装置分离。此外,参照图7,在安装板15a上设置有平行的限位板15c,夹板54在限位板15c和安装板15a之间运动。
值得注意的是,上述固定机构50也可是设置在安装板15a上的电磁铁,其电磁力可吸引铁质的引流器60,防止其托离安装板15a。或者也可是单独设置在安装板15a上的夹持机构,安装板15a上无需设置销体15d或其他限位结构,直接由夹持机构夹持。
实施例4
在本实施例中,参照图1,所述自动接线装置还包括第三拨线机构,所述第三拨线机构包括第三拨线件33和第一连杆34。第三拨线件33为长条状设置,其中间区域与侧板12铰接,并与所述第二拨线件32的叉脚交叉设置,第三拨线件33位于第二凹槽32d的一侧,所述第三拨线件33和第二拨线件32构造成一个限制引流线位置的容置空间,第二凹槽32d位于容置空间的底部,该容置空间的开口正对第二安装空间,由此第三拨线件33起到辅助限位的作用,可避免引流线从第二凹槽32d中脱落。第一连杆34,一端与所述第三拨线件33远离所述引流器60的一端铰接,另一端与所述第一拨线件22远离所述引流器60的一端铰接。由此侧板12、第一拨线件22、第一连杆34、第三拨线件33构成四连杆机构,第一拨线件22摆动带动第三拨线件33摆动,以辅助第二拨线件32将引流线限制在第二安装空间。
实施例5
本发明还提出一种工程车辆,该工程车辆包括上述的自动接线装置、车辆主体以及连接所述车辆主体和所述自动接线装置的机械臂或升降装置。在本实施例中,该工程车辆主要用于电力设备的安装和维修,车辆主体通过轮式或履带驱动,机械臂和升降装置用于升降该自动接线装置,使其到达检修或安装位置。通过设置带有自动接线装置的工程车,该工程车在连接引流线的过程中,由于不用剥去绝缘层,直接采用单臂操作即可完成上述工序。
具体的,引流器60安装在安装板15a上,固定机构50夹紧引流器60实现固定。自动接线装置由机械臂或升降装置抬升至目标区域,使第一拨线件22靠近供电主线,第一驱动件21驱动其将供电主线扣入第一安装空间中,并覆压在供电主线上,供电主线限制在第一凹槽22d和第一安装空间之间,进一步防止供电主线的脱离。
同时,第二拨线件32靠近引流线,第二驱动件31驱动第二拨线件32并将引流线拨入第二安装空间中,第二拨线件32覆压在引流线上,引流线则被限制在第二凹槽32d和第二安装空间之间。接着由驱动机构40驱动第一旋拧机构80带动第一螺钉65旋拧入第一安装空间并抵持供电主线实现固定;驱动机构驱动第二旋拧机构90转动,带动第二螺钉66旋拧入第二安装空间并抵持引流线实现固定。在供电主线与引流线导通后,固定机构50松开引流器60,移动自动接线装置实现与引流器60的分离。
本发明还提出一种带电作业机器人,该带电作业机器人包括上述的自动接线装置。
值得注意的是,以上所有实施例中,自动接线装置与引流器60、第一螺钉65和第二螺钉66直接连接的各零部件均采用绝缘材料制成,此处可选高强度的工程塑料或复合材料。此外除驱动机构40、传动机构70以及多个驱动件外的所有部件也采用绝缘材料制成。由此可避防止高压的供电主线的电流传递至接线机构,避免产生漏电事故。
此外,图1中,自动接线装置上并排设置有两个引流器,对应第一旋拧机构80、第二旋拧机构90均设置有两套,其传动机构70包括一个主齿轮以及4个行星齿轮作为从动齿轮,主齿轮由主动齿轮驱动。其他四个从动齿轮驱动对应的四根转轴和四个转筒转动。
在以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。以上实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
- 自动接线装置和具有其的工程车辆、带电作业机器人
- 引流线接线装置和工程车辆及带电作业机器人