一种多工位玻璃瓶胆自动拉尾机
文献发布时间:2023-06-19 09:57:26
技术领域
本发明涉及瓶胆自动拉尾巴的通用机械技术领域,尤其涉及一种多工位玻璃瓶胆自动拉尾机。
背景技术
随着环保工业的市场需求,多工位拉尾机运用在很多场合,如保温瓶胆的生产、咖啡玻璃瓶胆的生产等等都运用到多工位拉尾机。在工厂生产时,目前全世界玻璃瓶胆制造业拉尾是人手工进行保温瓶胆尾巴的拉伸,由于处在高温下人很容易受到烫伤或者灼伤,安全性能差,使工人处在危险的工作条件下。
目前玻璃瓶胆制造业,拉尾工序需要的人员多、对场地空间要求高、拉伸标准不统一;人工拉尾机是由人工搭建的一个简单的工作平台,只能由一个工人手动的对保温瓶胆尾巴进行拉伸,而这样使得工作效率低,人工需求量大、对工人熟练度需求高、不宜大批量生产作业。
现有拉尾机所出现的问题:(1)从使用角度,现有的拉尾机工作效率差、操作不方便。(2)从安全角度,老旧的拉尾机没有安全保护功能、操作工人极度靠近高温火源易受伤。(3)从环境和节能角度,拉尾机火焰一直燃烧,对能源使用浪费,使环境受到污染。
如何解决上述技术问题为本发明面临的课题。
发明内容
本发明的目的在于提供一种多工位玻璃瓶胆自动拉尾机,解决了当下很多工厂的拉尾工序,人工进行拉尾巴效率低,安全性低的问题,该多工位玻璃瓶胆自动拉尾机可以大大增加工作人员的工作效率,减少人力的浪费,提高工人的安全,并且节约能源保护了环境。
本发明是通过如下措施实现的:一种多工位玻璃瓶胆自动拉尾机,包括设有调节脚的机架,其中,在所述机架上设有水平操作台和若干组导轨,自所述水平操作台的上方、自上而下依次设有若干组火头摇摆机构和若干组火头摇摆升降机构,若干组所述导轨上各设置一组夹爪二元运动机构。
所述机架是由40*40铝型材搭建而成,其脚上有可以调节高度的调节脚,使其可以根据现场情况调节水平度。
作为本发明提供的一种多工位玻璃瓶胆自动拉尾机进一步优化方案,所述火头摇摆机构包括火头摇摆框架、设置在所述火头摇摆框架上的火头主动机构、由所述火头主动机构驱动的火头摇摆传动机构和连接在所述火头摇摆传动机构的摆动部件上的喷火管,喷火管是燃气通过管道输送燃气至此点燃,对准瓶胆尾巴进行加热。
所述火头主动机构是火头摇摆机构、火头摆动的动力系统。
所述火头摇摆机构可以自动的控制火头的开关和往复半旋转,对玻璃瓶胆的尾巴进行加热,火头摇摆机构动力从火头主动机构传输出来到达轴上面,然后轴上面的锥齿轮组件将动力传输到每一个工位。
作为本发明提供的一种多工位玻璃瓶胆自动拉尾机进一步优化方案,所述火头主动机构包括设置在所述火头摇摆框架上的电机,与所述电机输出轴同轴的偏向轮,一端铰接于所述偏向轮上连接柱的牵拉部件,铰接于所述牵拉部件另一端部、且做往复直线运动的齿条,固定在所述水平操作台上的齿条导向架,以及位于所述齿条导向架下方、由所述齿条啮合驱动的齿轮,齿轮将转动的力传递到火头摇摆传动机构,使其摆动或转动。
所述火头主动机构是将电机动力传输出来,转换成往复运动输出,使得电机可以单方向运行,齿条与齿轮啮合,将齿条的直线运动转化成齿轮的转动。
所述火头摇摆框架由40*40铝型材搭建而成,是火头摇摆机构的总框架,火头摇摆框架固定在火头摇摆升降机构上面。
作为本发明提供的一种多工位玻璃瓶胆自动拉尾机进一步优化方案,所述齿条导向架由设置在所述水平操作台上的四个支撑柱,设置在四个所述支撑柱上的支撑台,设置在所述支撑台四角处的固定套,设置在每两个所述固定套之间的两导向轨,沿两所述导向轨滑动设置两组滑块,固定设置在两组所述滑块顶面的压板,以及跨接在所述压板与所述支撑台之间的连接件,两所述滑块与所述压板构成容纳所述齿条往复移动的导轨;两组滑块安装在两所述导向轨上面,对齿条往复运行起到稳定的作用。
作为本发明提供的一种多工位玻璃瓶胆自动拉尾机进一步优化方案,所述火头摇摆传动机构包括设有所述齿轮的主传动轴,等间距设置在所述火头摇摆框架上,且与所述主传动轴平行的若干个从动传动轴,设置在若干个所述从动传动轴一端的联动轴,固定所述主传动轴、所述从动传动轴或者所述联动轴的若干轴承座,设置在所述主传动轴、所述从动传动轴和所述联动轴上的锥齿轮组件,设置在所述主传动轴和所述从动传动轴驱动端部的所述摆动部件。
作为本发明提供的一种多工位玻璃瓶胆自动拉尾机进一步优化方案,每组所述火头摇摆升降机构包括安装在所述水平操作台上的升降导向轴承上的传动轴,设置在所述传动轴上的驱动齿轮,与所述驱动齿轮相互啮合、且能上下移动的导向齿条,固定在所述水平操作台上的固定支架,设置在所述固定支架上、与所述导向齿条齿槽相对的一侧面相贴合的限位轮,连接于所述导向齿条顶部的升降平台,设置在所述升降平台下方的四个升降柱,设置在所述升降平台与所述水平操作台之间的浮动接头,位于所述水平操作台下方的升降气缸,所述升降气缸动力升降杆贯穿所述水平操作台与所述浮动接头连接,四个所述升降柱贯穿所述水平操作台的四角处的导向套,四个所述升降柱的底部连接有矩形限位框,所述矩形限位框用于限制所述升降柱相对所述导向套底部的位置;
所述升降气缸是火头摇摆升降机构的动力部分;浮动接头是固定升降气缸的,可以避免机械安装误差给气缸带来损伤。
所述导向齿条下段贯穿所述升降平台的导向孔内,且所述导向齿条的长度大于四个所述升降柱的长度。
相邻所述火头摇摆升降机构的所述传动轴同轴设置,驱动齿轮、导向齿条和传动轴同步左右两边的升降平台,限位轮是导向齿条上下移动时导向的作用。
所述火头摇摆升降机构主要功能是使火头摇摆机构能够上升下降,可以做到配合流水线自动上下料;轴上面可以收放不同规格的电线电缆。
作为本发明提供的一种多工位玻璃瓶胆自动拉尾机进一步优化方案,每组所述夹爪二元运动机构包括与至少两组所述导轨滑动配合的两组导轨滑块,连接在所述导向滑块顶面的移动平台,设置在所述移动平台底面的两气动直线轴承导轨部件、两竖直升降气缸和升降导向柱,所述气动直线轴承导轨部件的导向杆、两竖直升降气缸浮动接头和升降导向柱贯穿所述移动平台与托板连接;两竖直升降气缸是为了拉管机械手支架能够上下移动,避开与玻璃瓶胆碰撞而安装的。
所述夹爪二元运动机构还包括设置在所述火头摇摆框架一侧,用于推动所述移动平台沿所述导轨滑动的水平推动气缸和设置在所述气动直线轴承导轨部件上的拉管机械手,在所述拉管机械手一侧还设有尾管支架;
所述水平推动气缸推动拉管机械手的支架前移后移,达到模仿人手拉瓶胆尾巴的效果。
所述气动直线轴承导轨部件由设置在所述移动平台上的气动直线导轨,设置在所述气动直线导轨下方的导轨支架组成,所述导轨支架上方连接所述尾管支架,尾管支架是由铁板通过切割成形,然后折弯成一个V字型,达到给瓶胆定位的效果。
作为本发明提供的一种多工位玻璃瓶胆自动拉尾机进一步优化方案,所述拉管机械手为气动机械钳手,拉管机械手是代替人手的作用,因为是金属材料不需要担心安全问题。
所述夹爪二元运动机构对玻璃瓶胆的尾巴进行自动拉伸和拉掉尾巴的作用。
作为本发明提供的一种多工位玻璃瓶胆自动拉尾机进一步优化方案,所述摆动部件包括固定连接于所述主传动轴和所述从动传动轴驱动端部的连接头,设置在所述连接头上的摆动元件,两所述喷火管分别安装在所述摆动元件的两端。
作为本发明提供的一种多工位玻璃瓶胆自动拉尾机进一步优化方案,所述喷火管呈L形状,每一个所述摆动元件上的两个所述喷火管的喷头相对设置。
与现有技术相比,本发明的有益效果为:本发明通过火头摇摆机构、火头摇摆升降机构、夹爪二元运动机构可以模拟人手工拉瓶胆尾巴的工艺效果,可以同时对多工位点工作,生产效率高,人工成本降低,省时省力,稳定性好,安全性高,使用方便,能很好的帮助工厂工人完成一天高强度的劳动;该多工位玻璃瓶胆自动拉尾机是多工位自动化生产,效率高,安全系数高,无需熟练操作工、适用于大批量生产、能够使能源得到节约使用。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
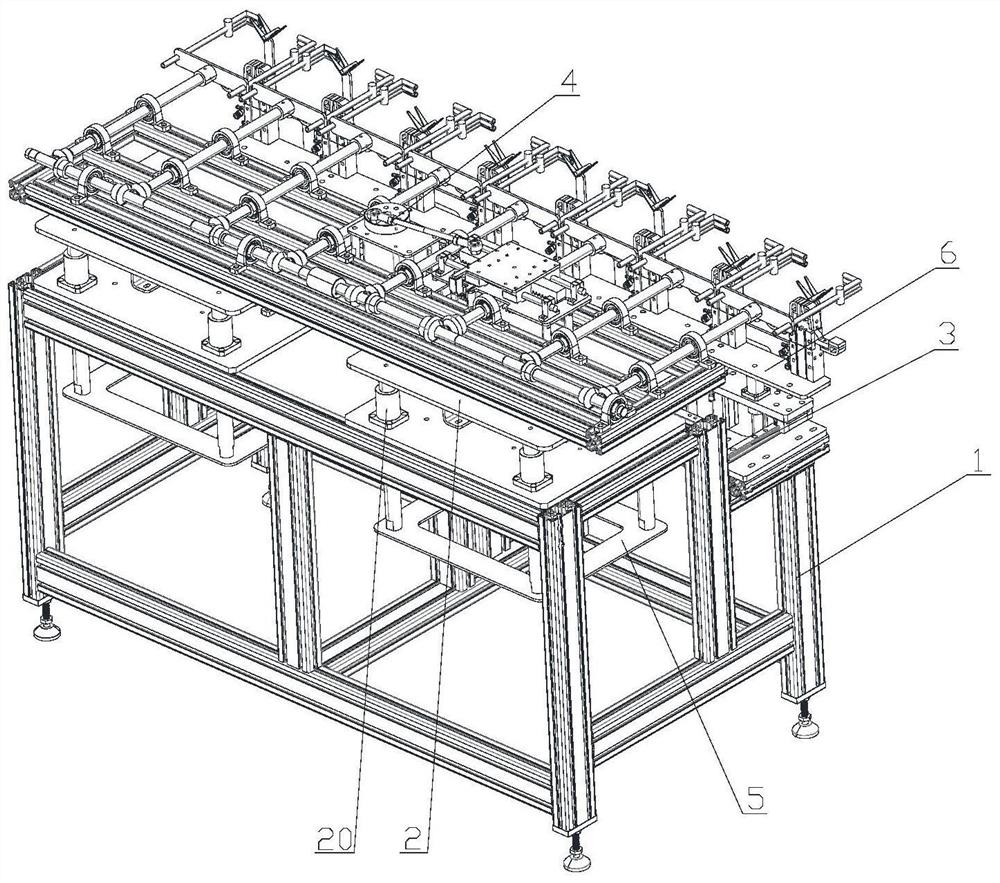
图1为本发明实施例的整体结构示意图。
图2为本发明实施例中火头摇摆机构的结构示意图。
图3为本发明实施例中火头主动机构的结构示意图。
图4为本发明实施例中两相邻火头摇摆升降机构之间位置关系的结构示意图。
图5为本发明实施例中夹爪二元运动机构的主视图。
图6为本发明实施例中夹爪二元运动机构的结构示意图。
其中,附图标记为:
1、机架;
2、水平操作台;20、导向套;
3、导轨;
4、火头摇摆机构;40、火头摇摆框架;41、火头主动机构;410、电机;411、偏向轮;412、牵拉部件;413、齿条;414、齿条导向架;4140、支撑柱;4141、支撑台;4142、固定套;4143、导向轨;4144、滑块;4145、压板;415、齿轮;42、火头摇摆传动机构;420、摆动部件;421、主传动轴;422、从动传动轴;423、联动轴;424、锥齿轮组件;43、喷火管;
5、火头摇摆升降机构;50、升降导向轴承;500、传动轴;51、驱动齿轮;52、导向齿条;53、固定支架;54、限位轮;55、升降平台;56、升降柱;57、升降气缸;58、矩形限位框;59、浮动接头;
6、夹爪二元运动机构;60、导轨滑块;61、移动平台;62、气动直线轴承导轨部件;63、竖直升降气缸;64、升降导向柱;65、托板;66、水平推动气缸;67、拉管机械手;68、尾管支架。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。当然,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
实施例1
参见图1至图6,本发明提供其技术方案为,一种多工位玻璃瓶胆自动拉尾机,包括设有调节脚的机架1,其中,在机架1上设有水平操作台2和若干组导轨3,自水平操作台2的上方、自上而下依次设有若干组火头摇摆机构4和若干组火头摇摆升降机构5,若干组导轨3上各设置一组夹爪二元运动机构6。
机架1是由40*40铝型材搭建而成,其脚上有可以调节高度的调节脚,使其可以根据现场情况调节水平度。
具体地,火头摇摆机构4包括火头摇摆框架40、设置在火头摇摆框架40上的火头主动机构41、由火头主动机构41驱动的火头摇摆传动机构42和连接在火头摇摆传动机构42的摆动部件420上的喷火管43,喷火管43是燃气通过管道输送燃气至此点燃,对准瓶胆尾巴进行加热。
火头主动机构41是火头摇摆机构4、火头摆动的动力系统。
火头摇摆机构4可以自动的控制火头的开关和往复半旋转,对玻璃瓶胆的尾巴进行加热,火头摇摆机构4动力从火头主动机构41传输出来到达轴上面,然后轴上面的锥齿轮组件424将动力传输到每一个工位。
具体地,火头主动机构41包括设置在火头摇摆框架40上的电机410,与电机410输出轴同轴的偏向轮411,一端铰接于偏向轮411上连接柱的牵拉部件412,铰接于牵拉部件412另一端部、且做往复直线运动的齿条413,固定在水平操作台2上的齿条导向架414,以及位于齿条导向架414下方、由齿条413啮合驱动的齿轮415,齿轮415将转动的力传递到火头摇摆传动机构42,使其摆动或转动。
火头主动机构41是将电机410动力传输出来,转换成往复运动输出,使得电机410可以单方向运行,齿条413与齿轮415啮合,将齿条413的直线运动转化成齿轮415的转动。
火头摇摆框架40由40*40铝型材搭建而成,是火头摇摆机构4的总框架,火头摇摆框架40固定在火头摇摆升降机构5上面。
具体地,齿条导向架414由设置在水平操作台2上的四个支撑柱4140,设置在四个支撑柱4140上的支撑台4141,设置在支撑台4141四角处的固定套4142,设置在每两个固定套4142之间的两导向轨4143,沿两导向轨4143滑动设置两组滑块4144,固定设置在两组滑块4144顶面的压板4145,以及跨接在压板4145与支撑台4141之间的连接件,两滑块4144与压板4145构成容纳齿条413往复移动的导轨;两组滑块4144安装在两导向轨4143上面,对齿条413往复运行起到稳定的作用。
具体地,火头摇摆传动机构42包括设有齿轮415的主传动轴421,等间距设置在火头摇摆框架40上,且与主传动轴421平行的若干个从动传动轴422,设置在若干个从动传动轴422一端的联动轴423,固定主传动轴421、从动传动轴422或者联动轴423的若干轴承座424,设置在主传动轴421、从动传动轴422和联动轴423上的锥齿轮组件424,设置在主传动轴421和从动传动轴422驱动端部的摆动部件420。
具体地,每组火头摇摆升降机构5包括安装在水平操作台2上的升降导向轴承50上的传动轴500,设置在传动轴500上的驱动齿轮51,与驱动齿轮51相互啮合、且能上下移动的导向齿条52,固定在水平操作台2上的固定支架53,设置在固定支架53上、与导向齿条52齿槽相对的一侧面相贴合的限位轮54,连接于导向齿条52顶部的升降平台55,设置在升降平台55下方的四个升降柱56,设置在升降平台55与水平操作台2之间的浮动接头59,位于水平操作台2下方的升降气缸57,升降气缸57动力升降杆贯穿水平操作台2与浮动接头59连接,四个升降柱56贯穿水平操作台2的四角处的导向套20,四个升降柱56的底部连接有矩形限位框58,矩形限位框58用于限制升降柱56相对导向套20底部的位置;
升降气缸57是火头摇摆升降机构5的动力部分;浮动接头59是固定升降气缸57的,可以避免机械安装误差给气缸带来损伤。
导向齿条52下段贯穿升降平台55的导向孔内,且导向齿条52的长度大于四个升降柱56的长度。
相邻火头摇摆升降机构5的传动轴500同轴设置,驱动齿轮51、导向齿条52和传动轴500同步左右两边的升降平台55,限位轮54是导向齿条52上下移动时导向的作用。
火头摇摆升降机构5主要功能是使火头摇摆机构4能够上升下降,可以做到配合流水线自动上下料;轴上面可以收放不同规格的电线电缆。
具体地,每组夹爪二元运动机构6包括与至少两组导轨3滑动配合的两组导轨滑块60,连接在导向滑块60顶面的移动平台61,设置在移动平台61底面的两气动直线轴承导轨部件62、两竖直升降气缸63和升降导向柱64,气动直线轴承导轨部件62的导向杆、两竖直升降气缸63浮动接头和升降导向柱64贯穿移动平台61与托板65连接;两竖直升降气缸63是为了拉管机械手67支架能够上下移动,避开与玻璃瓶胆碰撞而安装的。
夹爪二元运动机构6还包括设置在火头摇摆框架40一侧,用于推动移动平台61沿导轨3滑动的水平推动气缸66和设置在气动直线轴承导轨部件62上的拉管机械手67,在拉管机械手67一侧还设有尾管支架68;
水平推动气缸66推动拉管机械手67的支架前移后移,达到模仿人手拉瓶胆尾巴的效果。
气动直线轴承导轨部件62由设置在移动平台61上的气动直线导轨,设置在气动直线导轨下方的导轨支架组成,导轨支架上方连接尾管支架68,尾管支架是由铁板通过切割成形,然后折弯成一个V字型,达到给瓶胆定位的效果。
具体地,拉管机械手67为气动机械钳手,拉管机械手67是代替人手的作用,因为是金属材料不需要担心安全问题。
夹爪二元运动机构6对玻璃瓶胆的尾巴进行自动拉伸和拉掉尾巴的作用。
具体地,摆动部件420包括固定连接于主传动轴421和从动传动轴422驱动端部的连接头,设置在连接头上的摆动元件,两喷火管43分别安装在摆动元件的两端。
具体地,喷火管43呈L形状,每一个摆动元件上的两个喷火管43的喷头相对设置。
本发明的工作原理为:本发明通过火头摇摆机构4、火头摇摆升降机构5、夹爪二元运动机构6可以模拟人手工拉瓶胆尾巴的工艺效果,可以同时对多工位点工作。
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种多工位玻璃瓶胆自动拉尾机
- 一种多工位玻璃瓶胆自动拉尾机火头摇摆机构