一种基于新能源网联汽车远程控制的操控平台
文献发布时间:2023-06-19 09:57:26
技术领域
本发明属于操控平台技术领域,更具体地说,特别涉及一种基于新能源网联汽车远程控制的操控平台。
背景技术
随着社会的发展,汽车保有量持续增长,汽车已经变成人们除“家与办公室”以外的第三个重要空间,继智能家居之后,作为日常出行的主要交通工具,人们越来越关注车辆操控的智能化与便捷性,基于车联网的车辆远程控制系统是集中运用了计算机、通信、自动化控制、车辆工程等技术的综合管理系统,其主要设备一般放置在操控平台上进行使用。
如申请号为:CN201710039387.5的专利中,公开了一种远程控制系统,该远程控制系统包括:位于扫描室的影像诊断设备、及第一监控装置,位于控制室的控制台、控制转发装置、及第二监控装置,以及远程操作平台;其中,所述控制台与所述影像诊断设备相连,用以控制所述影像诊断设备的运行;所述控制转发装置与所述控制台相连,用以接收所述远程操作平台所发送的远程控制指令,并转换为控制所述控制台的控制信号;所述第一监控装置用以实时监控所述影像诊断设备的工作状态;所述第二监控装置用以监控所述控制台,本发明建立了一种安全的远程检测系统,该系统不仅可以使检测人员能够远程进行影像诊断设备的检测,同时可以确保影像诊断设备检测现场的被检测者的安全性。
现有操控平台的桌面大小一般为固定不可改变,当桌面上设备较多之后,增添设备或者整理设备时需要额外的桌面妥善放置待整理或者安装设备,以避免待安装或者待整理的设备,步骤繁琐,操作麻烦,实用性不高。
于是,有鉴于此,针对现有的结构及缺失予以研究改良,提供一种基于新能源网联汽车远程控制的操控平台,以期达到更具有更加实用价值性的目的。
发明内容
为了解决上述技术问题,本发明提供一种基于新能源网联汽车远程控制的操控平台,以解决现有操控平台的桌面大小一般为固定不可改变,当桌面上设备较多之后,增添设备或者整理设备时需要额外的桌面妥善放置待整理或者安装设备,以避免待安装或者待整理的设备,步骤繁琐,操作麻烦,实用性不高的问题。
本发明基于新能源网联汽车远程控制的操控平台的目的与功效,由以下具体技术手段所达成:
一种基于新能源网联汽车远程控制的操控平台,包括主操控平台,稳定支腿,联动杆,定位块和锁止连杆;所述主操控平台的内部插接有副操控平台;所述副操控平台的左侧中部固定连接有安装块;所述稳定支腿的一端转动连接在副操控平台侧板前部的连接块内;所述联动杆的一端转动连接在稳定支腿的端部,且联动杆的另一端转动连接在随动连杆的底部;所述随动连杆的顶部转动连接在副操控平台侧板后部的连接块内;所述定位块插接在副操控平台的安装块的内部;所述锁止连杆插接在副操控平台的底部中央。
进一步的,所述副操控平台的两个侧板外部设有轨道块,且轨道块的截面形状为“T”形,主操控平台的两侧板内部设有轨道槽,且轨道块插接在轨道槽内。
进一步的,所述稳定支腿的形状为“L”形设计,且稳定支腿横杆和竖杆之间夹角的角度为一百度。
进一步的,所述稳定支腿与联动杆的连接销轴外部设有弹簧块,且弹簧块的外部设有自动顶簧,自动顶簧的两端分别固定在弹簧块的内部和副操控平台底面的一端。
进一步的,所述主操控平台的底部设有限位挡条,且限位挡条的长度小于主操控平台的长度。
进一步的,所述主操控平台的底面中部设有定位齿条,且定位块的顶部设有锁止齿块,锁止齿块卡接在定位齿条的轮齿外部。
进一步的,所述锁止连杆的一端设有联动块,联动块的形状为斜边三角形,且联动块的斜边朝下,定位块的块体均开设有通透的避让槽,且联动块穿过定位块的避让槽内。
进一步的,所述定位块的底部设有固定顶簧,且固定顶簧的两端分别固定连接在定位块的底部和安装块内的底部。
与现有技术相比,本发明具有如下有益效果:
该装置的副操控平台能够隐藏在主操控平台的内部进行隐藏,减少占用空间,且副操控平台可拉出主操控平台内部自由长度进行使用,增大了桌面的可使用面积,方便设备的整理和安装,且当副操控平台拉出较大长度时,稳定支腿能够自动翻转支设,对该装置进行支撑,副操控平台推回主操控平台内部时,稳定支腿能够自动翻转隐藏,提高了该装置的实用性和稳定性。
首先,当需要抽拉副操控平台使用时,拉动锁止连杆,联动块向安装块内部移动,通过联动块底部斜边带动定位块下移,从而解除定位块顶部锁止齿块与主操控平台定位齿条的锁止关系,此时副操控平台可自由抽拉使用,轨道块能够通过轨道槽限制副操控平台的移动轨迹,使得副操控平台在移动过程中不会出现歪斜、扭曲导致装置卡死的现象发生,调节完成后当松开锁止连杆后,固定顶簧带动定位块和联动块复位,通过锁止齿块重新卡接在定位齿条的内部从而对副操控平台的位置进行固定,使得副操控平台在使用时不会意外移动,能够稳定的使用,提高了该装置的稳定性和实用性。
其次,当副操控平台拉出一定长度后,随动连杆失去限位挡条的限位作用,在自动顶簧以及稳定支腿的自重作用下稳定支腿能够自动翻转支设,从而对副操控平台进行支撑,且稳定支腿横杆和竖杆之间的夹角为一百度,使得稳定支腿支设后为外撇设计,能够对副操控平台进行稳定支撑,不会出现稳定支腿打滑回转的现象发生,提高了该装置的稳定性和实用性。
再者,在稳定支腿支设后需要将副操控平台推回主操控平台的内部时,拉动锁止连杆,解除定位块顶部锁止齿块与主操控平台定位齿条的锁止关系,回推副操控平台时,随动连杆在限位挡条的限位作用下自动翻转,从而通过联动杆带动稳定支腿翻转复位隐藏在主操控平台的内部,自动化程度高,使用方便灵活,提高了该装置的灵活性和适应性。
附图说明
图1是本发明的结构示意图。
图2是本发明图1的内部结构示意图。
图3是本发明图2左侧底部的结构示意图。
图4是本发明副操控平台隐藏在主操控平台内部时的内部结构示意图。
图5是本发明图4的左侧底部结构示意图。
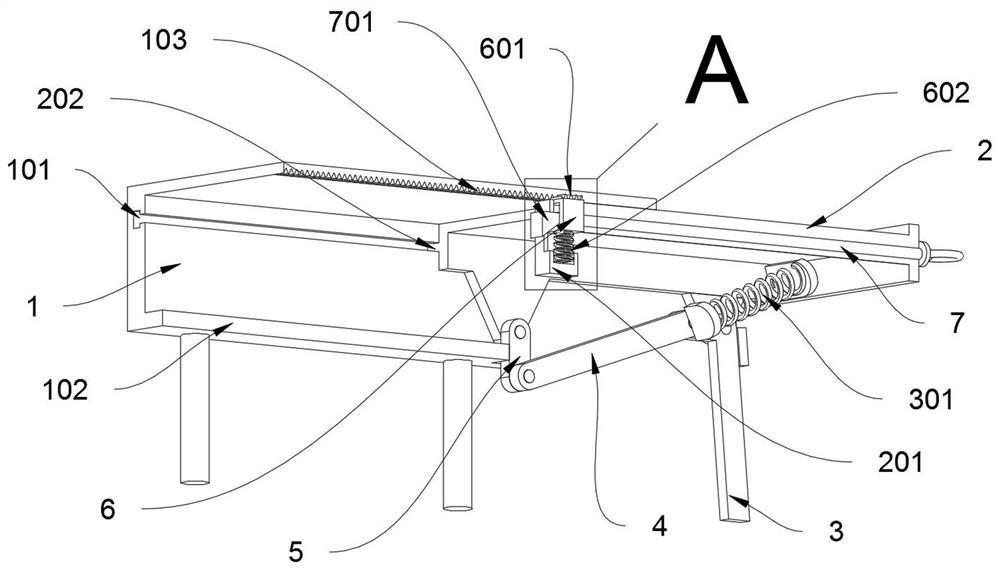
图6是本发明图3中A部位放大的结构示意图。
图中,部件名称与附图编号的对应关系为:
1、主操控平台;2、副操控平台;3、稳定支腿;4、联动杆;5、随动连杆;6、定位块;7、锁止连杆;101、轨道槽;102、限位挡条;103、定位齿条;201、安装块;202、轨道块;301、自动顶簧;601、锁止齿块;602、固定顶簧;701、联动块。
具体实施方式
下面结合附图和实施例对本发明的实施方式作进一步详细描述,以下实施例用于说明本发明,但不能用来限制本发明的范围。
在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制,此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
实施例:
如附图1至附图6所示:
本发明提供一种基于新能源网联汽车远程控制的操控平台,包括主操控平台1,稳定支腿3,联动杆4,定位块6和锁止连杆7;主操控平台1的内部插接有副操控平台2;主操控平台1的底面中部设有定位齿条103,且定位块6的顶部设有锁止齿块601,锁止齿块601卡接在定位齿条103的轮齿外部,该设计使得锁止齿块601能够卡接在定位齿条103的内部从而对副操控平台2的位置进行固定,使得副操控平台2在使用时不会意外移动,能够稳定的使用,提高了该装置的稳定性和实用性;副操控平台2的左侧中部固定连接有安装块201;稳定支腿3的一端转动连接在副操控平台2侧板前部的连接块内;稳定支腿3的形状为“L”形设计,且稳定支腿3横杆和竖杆之间夹角的角度为一百度,该设计使得稳定支腿3支设后为外撇设计,能够对副操控平台2进行稳定支撑,不会出现稳定支腿3打滑回转的现象发生,提高了该装置的稳定性和实用性;联动杆4的一端转动连接在稳定支腿3的端部,且联动杆4的另一端转动连接在随动连杆5的底部;随动连杆5的顶部转动连接在副操控平台2侧板后部的连接块内;定位块6插接在副操控平台2的安装块201的内部;定位块6的底部设有固定顶簧602,且固定顶簧602的两端分别固定连接在定位块6的底部和安装块201内的底部,该设计使得当松开锁止连杆7后,固定顶簧602带动定位块6和联动块701复位,通过锁止齿块601重新卡接在定位齿条103的内部从而对副操控平台2的位置进行固定,使得副操控平台2在使用时不会意外移动,能够稳定的使用,提高了该装置的稳定性和实用性;锁止连杆7插接在副操控平台2的底部中央。
其中,副操控平台2的两个侧板外部设有轨道块202,且轨道块202的截面形状为“T”形,主操控平台1的两侧板内部设有轨道槽101,且轨道块202插接在轨道槽101内,该设计使得副操控平台2能够隐藏在主操控平台1的内部进行隐藏,减少占用空间,且副操控平台2可拉出主操控平台1内部自由长度进行使用,增大了桌面的可使用面积,方便设备的整理和安装,且轨道块202能够通过轨道槽101限制副操控平台2的移动轨迹,使得副操控平台2在移动过程中不会出现歪斜、扭曲导致装置卡死的现象发生,提高了该装置的稳定性。
其中,稳定支腿3与联动杆4的连接销轴外部设有弹簧块,且弹簧块的外部设有自动顶簧301,自动顶簧301的两端分别固定在弹簧块的内部和副操控平台2底面的一端,该设计使得当副操控平台2拉出一定长度后,随动连杆5失去限位挡条102的限位作用,在自动顶簧301以及稳定支腿3的自重作用下稳定支腿3能够自动翻转支设,从而对副操控平台2进行支撑,方便快速,提高了该装置的稳定性。
其中,主操控平台1的底部设有限位挡条102,且限位挡条102的长度小于主操控平台1的长度,该设计使得当副操控平台2拉出一定长度后,随动连杆5失去限位挡条102的限位作用,在自动顶簧301以及稳定支腿3的自重作用下稳定支腿3能够自动翻转支设,从而对副操控平台2进行支撑,当回推副操控平台2时,随动连杆5在限位挡条102的限位作用下自动翻转,从而通过联动杆4带动稳定支腿3翻转复位隐藏在主操控平台1的内部,自动化程度高,使用方便灵活,提高了该装置的灵活性和适应性。
其中,锁止连杆7的一端设有联动块701,联动块701的形状为斜边三角形,且联动块701的斜边朝下,定位块6的块体均开设有通透的避让槽,且联动块701穿过定位块6的避让槽内,该设计使得当需要抽拉副操控平台2使用时,拉动锁止连杆7,联动块701向安装块201内部移动,通过联动块701底部斜边带动定位块6下移,从而解除定位块6顶部锁止齿块601与主操控平台1定位齿条103的锁止关系,此时副操控平台2可自由抽拉使用,提高了该装置的灵活性。
本实施例的具体使用方式与作用:
本发明中,将汽车远程控制的设备放置或者安装在主操控平台1或者副操控平台2的顶部即可, 当需要抽拉副操控平台2使用时,拉动锁止连杆7,联动块701向安装块201内部移动,通过联动块701底部斜边带动定位块6下移,从而解除定位块6顶部锁止齿块601与主操控平台1定位齿条103的锁止关系,此时副操控平台2可自由抽拉使用,轨道块202能够通过轨道槽101限制副操控平台2的移动轨迹,使得副操控平台2在移动过程中不会出现歪斜、扭曲导致装置卡死的现象发生,调节完成后当松开锁止连杆7后,固定顶簧602带动定位块6和联动块701复位,通过锁止齿块601重新卡接在定位齿条103的内部从而对副操控平台2的位置进行固定,使得副操控平台2在使用时不会意外移动,能够稳定的使用,当副操控平台2拉出一定长度后,随动连杆5失去限位挡条102的限位作用,在自动顶簧301以及稳定支腿3的自重作用下稳定支腿3能够自动翻转支设,从而对副操控平台2进行支撑,且稳定支腿3横杆和竖杆之间的夹角为一百度,使得稳定支腿3支设后为外撇设计,能够对副操控平台2进行稳定支撑,不会出现稳定支腿3打滑回转的现象发生,当稳定支腿3支设后需要将副操控平台2推回主操控平台1的内部时,拉动锁止连杆7,解除定位块6顶部锁止齿块601与主操控平台1定位齿条103的锁止关系,回推副操控平台2时,随动连杆5在限位挡条102的限位作用下自动翻转,从而通过联动杆4带动稳定支腿3翻转复位隐藏在主操控平台1的内部,自动化程度高,使用方便灵活,该装置的副操控平台2能够隐藏在主操控平台1的内部进行隐藏,减少占用空间,且副操控平台2可拉出主操控平台1内部自由长度进行使用,增大了桌面的可使用面积,方便设备的整理和安装,且当副操控平台2拉出较大长度时,稳定支腿3能够自动翻转支设,对该装置进行支撑,副操控平台2推回主操控平台1内部时,稳定支腿3能够自动翻转隐藏,提高了该装置的实用性和稳定性。
本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式,很多修改和变化对于本领域的普通技术人员而言是显而易见的,选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
- 一种基于新能源网联汽车远程控制的操控平台
- 一种基于IOT的车端后装设备实现网联的方法、与汽车远程控制终端交互的方法及系统