一种基于时隙的时空索引方法
文献发布时间:2023-06-19 09:58:59
技术领域
本发明涉及数据库领域中的时空索引技术,具体涉及到一种基于时隙的时空索引技术。
背景技术
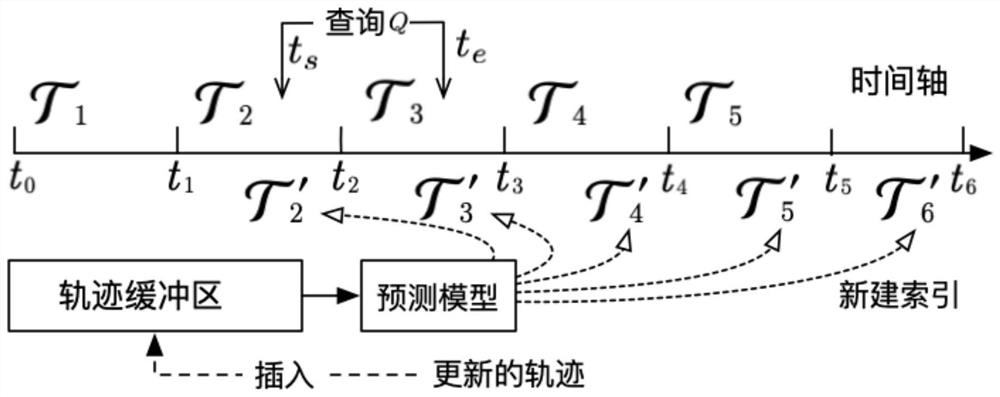
在时空数据库中,预测性时空查询被广泛用于回答诸如“10分钟后返回1平方公里以内的对象”之类的问题。这类时空查询可以表示为三元组 TPR(Time Parameterized Tree)树是使用最广泛的一种的时空索引。TPR树中的移动模型是由线性函数来表示的。传统TPR树回答的预测性查询只是依赖当前对象的速度以及位置,并应用线性模型来预测未来某一个时刻的位置。例如,假设r是TPR树在时间t被索引的运动对象。r的当前位置为r 近年来,人工智能迅速发展,越来越多的模型可以准确的预测运动对象最近一段时间内的运动轨迹。例如,给定某个移动物体的过去10分钟的轨迹,预测模型可以给出未来10分钟该对象每分钟的位置坐标。智能模型对轨迹的预测准确率远远高于仅应用直线运动模型的准确率。因此当使用智能模型来替换TPR树中的直线运动模型将会极大地提高预测性查询的准确性。然而,传统的TPR树无法索引利用这些预测的轨迹信息,即无法索引未来一段时间的轨迹,只能保存当前时间点位置和速度。 发明内容 针对现有技术的不足,为了解决背景技术中存在的问题,本发明的目的在于提供了一种基于时隙的时空索引(TS-TPR,Time-slot based TPR)以及相关的构建、更新以及查询方法。 本发明所采用的技术方案如下: 1)根据运动对象的轨迹,构建TS-TPR索引结构,将实时获得的预测轨迹插入到TS-TPR中对应的TPR树中; 2)批量更新TS-TPR索引结构中的轨迹数据; 3)以分而治之方式使用TS-TPR回答预测性时空查询。 所述步骤1)中, 1.1)根据预测轨迹,确定TS-TPR索引结构的关键参数,关键参数是时隙的长度Δt;按照以下公式处理确定时隙的长度Δt: Δt=H/m 其中,m表示TS-TPR索引结构中建立的TPR树的数量,H表示TS-TPR索引结构的预测性查询最长时间; 1.2)TS-TPR索引结构由若干TPR树(Time-Parameterized Tree)组成,若干TPR树之间按照时序排列,相邻TPR树之间具有时间间隔,且时间间隔相等作为时隙;各个TPR树存储有运动对象的轨迹中各个时刻的位置和速度信息,同一TPR树存储有各个运动对象在同一时刻的位置坐标和速度信息,不同TPR树存储有各个运动对象在不同时刻的位置和速度信息。 对于新采集获得的预测轨迹T 所述步骤2)具体为: TS-TPR索引结构中将位于时序最前的TPR树删除,并根据最新实时采集获得的运动对象的位置和速度信息构建位于时序最后的新的TPR树,并将预测轨迹的信息数据插入到新的TPR树中;同时设置有缓冲区,缓冲区收集存储两个连续时隙之间的所有最新实时采集的位置和速度信息,在时间经过一个时隙时,取出缓冲区中的位置和速度信息进行更新处理; 所述步骤3)具体为: 当查询的时间窗口在一个时隙内,查询由对应的一个TPR树回答反馈; 当查询的时间窗口跨越多个时隙时,查询按照所跨越的多个时隙拆分成若干子查询,各个子查询被分配到各自对应时隙的TPR树回答反馈单独处理,最后再将反馈结果合并。 本发明构建的时空索引结构由若干TPR树组成,每一个TPR树代表了不同时刻的轨迹状态,TPR树之间的时间间隔是相等的,称之为时隙。 本发明具有的有益效果是: 通过本发明的索引能索引预测轨迹,可以索引连续轨迹,完成有关的预测性查询,提升了预测性查询的准确率。 附图说明 图1是基于时隙的时空索引结构示意图。 具体实施方式 现结合具体实施和示例对本发明的技术方案作进一步说明。 本发明具体实施例及其实施过程如下: 1)根据运动对象的轨迹,构建TS-TPR索引结构,将实时获得的预测轨迹插入到TS-TPR中对应的TPR树中,TPR树中的节点存储运动对象的位置和速度; 预测轨迹是由采集的已知历史轨迹通过神经网络模型等处理预测获得,每经过一个时刻,神经网络模型利用最新时刻的位置坐标和速度信息叠加到以前的历史轨迹上再更新处理获得最新的预测轨迹。 1.1)根据预测轨迹,确定TS-TPR索引结构的关键参数,关键参数是时隙的长度Δt;通过预测模型获得的预测轨迹为T Δt=H/m 其中,m表示TS-TPR索引结构中建立的TPR树的数量,即轨迹长度,有多少时刻就有多少TPR树,H表示TS-TPR索引结构的预测性查询最长时间;当H=10分钟时,TS-TPR索引结构准确回答未来10分钟以内的预测性查询。实际应用中,时隙一般不超过3分钟。 当Δt越小,则需要TPR树的数量就越多,查询质量高;反之,则TPR数目越少,查询准确率低。在城市车辆的预测查询场景中,Δt的取值一般不会超过3分钟。 1.2)TS-TPR索引结构由若干TPR树(Time-Parameterized Tree)组成,用于索引轨迹信息;若干TPR树之间按照时序排列,相邻TPR树之间具有时间间隔,且时间间隔相等作为时隙;各个TPR树存储有运动对象的轨迹中各个时刻的位置和速度信息,同一TPR树存储有各个运动对象在同一时刻的位置坐标和速度信息,不同TPR树存储有各个运动对象在不同时刻的位置和速度信息; 运动对象在不同时刻的位置和速度信息是通过GPS、北斗等定位系统采集的轨迹提取获得。 对于新采集获得的预测轨迹T s 例如,假设一个运动对象的预测轨迹为T 在第1个TPR树 2)批量更新TS-TPR索引结构中的轨迹数据; TS-TPR索引结构中将位于时序最前的TPR树删除,并根据最新实时采集获得的运动对象的位置和速度信息构建位于时序最后的新的TPR树,并将预测轨迹的信息数据插入到新的TPR树中;同时设置有缓冲区,缓冲区收集存储两个连续时隙之间的所有最新实时采集的位置和速度信息,在时间经过一个时隙时,取出缓冲区中的位置和速度信息进行更新处理;这样能批量更新轨迹以提高效率。 如图1所示,当时间到t 运动对象不断地向预测模型发送更新后的位置信息,预测模型不断地产生新的轨迹。但是TS-TPR不会即时更新。 如图1所示,TS-TPR维护一个缓冲区以收集两个连续时隙之间的所有更新数据。当时间到下一个时隙时,TS-TPR删除最近一颗TPR树,并批量更新轨迹以提高效率。在TS-TPR处于正在更新轨迹的期间,有关轨迹的预测性查询请求全部由旧的索引来回答,当更新完全结束之后,查询由新的索引接管。 3)以分而治之方式使用TS-TPR回答预测性时空查询; 当查询的时间窗口在一个时隙内,查询由对应的一个TPR树回答反馈; 当查询的时间窗口跨越多个时隙时,查询按照所跨越的多个时隙拆分成若干子查询,各个子查询被分配到各自对应时隙的TPR树回答反馈单独处理,最后再将反馈结果合并。 由图1所示查询
- 一种基于时隙的时空索引方法
- 一种基于机器学习的图像时空索引快速检索方法