一种高原无人机飞控电调系统
文献发布时间:2023-06-19 09:58:59
技术领域
本发明涉及无人机控制技术领域,具体是涉及一种高原无人机飞控电调系统。
背景技术
目前无人机系统的设计主要以平原地区为应用场景来设计的,当无人机的应用场景在高原时,此类无人机便无法飞行。高原地区环境恶劣、空气稀薄,导致无人机的进气量很小,使无人机推力产生困难,动力变弱难以驱动螺旋桨。因此,高海拔地区无人机的气动性能不佳,升力变小,无人机无法正常运行。
发明内容
为解决高海拔地区无人机无法正常运行的问题,本发明提出了一种高原无人机专用的飞控电调系统,提高无人机在高原地区的飞行效率和保障无人机在高原的正常运行。
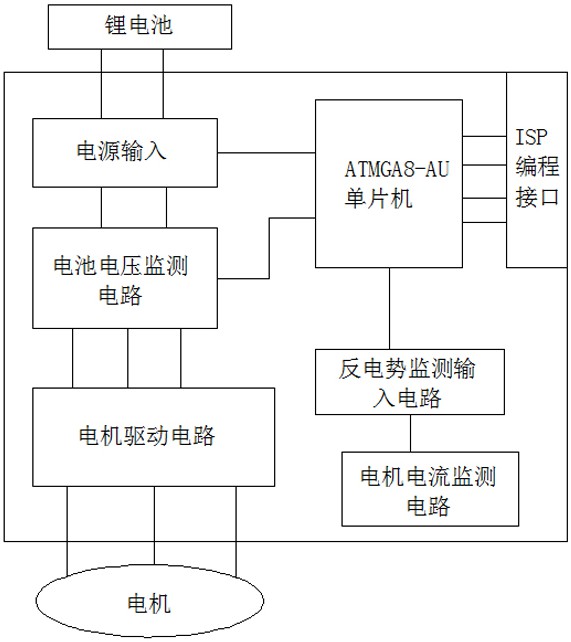
本发明提供一种高原无人机飞控电调系统,包括硬件配置和程序部分,硬件配置采用以ATMEGA8A-AU单片机为核心的无刷直流电机控制系统,还包括设置在ATMEGA8A-AU单片机外围的电源、电池电压监测电路、ISP编程接口、反电势监测输入电路、电机电流监测电路、电机驱动电路;电机的驱动采用全桥驱动电路,使用全N沟道的MOS管控制。
将电机调速控制信号的周期调整在900μs~1500μs之间;程序使用ATMEGA8A-AU内部定时器作为检测调速信号的基准时钟;当ATMEGA8A-AU工作在16MHz,定时器工作在8分频的模式下时,定时器的时间精度为 0.4-0.5μs。
所述的程序部分,电机的换相控制在程序主程序中完成,其控制流程为:程序以三相六状态循环的方式工作,当进入一个状态的控制阶段时,程序首先根据上一次换相的时间估算本次过零点时间,然后等待检测反电势过零点;当检测到准确的过零点时间后,程序计算出本次换相点理论时间;随后根据设置的参数对换相时间做修正,以发挥电机的最大工作效率;当换相时间到达时,程序切换MOS管的通断状态,然后进入下一状态的控制阶段。
所述的程序部分,电机调速控制信号的检测在外部中断程序中完成,其检测流程为:外部中断程序触发后,检测并记录调速控信号的上升沿与下降沿,根据基准时钟计算出脉冲时间,然后设置PWM的占空比,即完成对脉冲时间和PWM占空比的优化调整后,退出中断程序。
所述的程序部分,还包括电池电压监测程序:在电机启动之前,程序首先检测电池的电压,如果电池电压过低或过高,程序会发出报警;
所述的程序部分,还包括反电势检测输入保护程序:通过一个定时器中断检测控制脉冲信号的输入情况,如果在一定时间内没有信号输入,程序将关闭电机以防发生意外情况;
所述的程序部分,还包括电机电流监测程序:程序在每次换相结束后,都会检测电池的当前电压与电机的工作电流,当电机发生堵转时,通过电机的电流会陡然上升,软件将立即关闭电流输出以防止电池或电机的损坏;
所述的程序部分,还包括启动看门狗功能:程序启动ATMEGA8A-AU中的看门狗功能,用以外部干扰导致软件发生异常时自动启动。
本发明的有益效果在于:适应无人机在稀薄空气条件下的飞行,系统通过对脉冲时间和PWM占空比的优化调整,让无人机更加适合在高原地区飞行。发挥电机的最大工作效率,使无人机在高原地区动力更为充沛。针对无人机在高原实际使用中经常会发生电池电压过高或过低、控制信号中断、电机堵转等意外情况。设计保护程序,避免控制板电路无法正常工作及成电池与电机的烧毁等问题。
附图说明
图1为本发明系统硬件配置图;
图2为本发明电机换相控制流程图;
图3为本发明调速信号检测流程图。
具体实施方式
实施例1,本发明提供一种高原无人机飞控电调系统,包括硬件配置和程序部分,硬件配置采用以ATMEGA8A-AU单片机为核心的无刷直流电机控制系统,还包括设置在ATMEGA8A-AU单片机外围的电源、电池电压监测电路、ISP编程接口、反电势监测输入电路、电机电流监测电路、电机驱动电路;电机的驱动采用全桥驱动电路,使用全N沟道的MOS管控制。
所述的电源输入连接无人机的锂电池,所述的电机驱动电路连接电机。
将电机调速控制信号的周期调整在900μs~1500μs之间;程序使用ATMEGA8A-AU内部定时器作为检测调速信号的基准时钟;当ATMEGA8A-AU工作在16MHz,定时器工作在8分频的模式下时,定时器的时间精度为 0.4-0.5μs。
所述的程序部分,电机的换相控制在程序主程序中完成,其控制流程为:程序以三相六状态循环的方式工作,当进入一个状态的控制阶段时,程序首先根据上一次换相的时间估算本次过零点时间,然后等待检测反电势过零点;当检测到准确的过零点时间后,程序计算出本次换相点理论时间;随后根据设置的参数对换相时间做修正,以发挥电机的最大工作效率;当换相时间到达时,程序切换MOS管的通断状态,然后进入下一状态的控制阶段。
所述的程序部分,电机调速控制信号的检测在外部中断程序中完成,其检测流程为:外部中断程序触发后,检测并记录调速控信号的上升沿与下降沿,根据基准时钟计算出脉冲时间,然后设置PWM的占空比,即完成对脉冲时间和PWM占空比的优化调整后,退出中断程序。
所述的程序部分,还包括电池电压监测程序:在电机启动之前,程序首先检测电池的电压,如果电池电压过低或过高,程序会发出报警;
所述的程序部分,还包括反电势检测输入保护程序:通过一个定时器中断检测控制脉冲信号的输入情况,如果在一定时间内没有信号输入,程序将关闭电机以防发生意外情况;
所述的程序部分,还包括电机电流监测程序:程序在每次换相结束后,都会检测电池的当前电压与电机的工作电流,当电机发生堵转时,通过电机的电流会陡然上升,软件将立即关闭电流输出以防止电池或电机的损坏;
所述的程序部分,还包括启动看门狗功能:程序启动ATMEGA8A-AU中的看门狗功能,用以外部干扰导致软件发生异常时自动启动。
- 一种高原无人机飞控电调系统
- 多旋翼无人机、动力系统、电调、电调的控制方法及系统