无人驾驶飞行器、驱动方法和程序
文献发布时间:2023-06-19 10:03:37
技术领域
本技术涉及无人驾驶飞行器、驱动方法和程序,并且特别地,涉及使得可以容易地平衡机体的无人驾驶飞行器、驱动方法和程序。
背景技术
近年来,无人驾驶飞行器已经用于运送行李和利用相机进行拍照。
这样的无人驾驶飞行器通过旋转多个螺旋桨而飞行,并且通过在飞行期间调节多个螺旋桨中的每一个的旋转速度而沿期望的方向飞行。
顺便提及,作为调节机体的重心的位置的技术,已经提出了如下技术:相对于直升机的机身,通过移动设置有主旋翼和尾旋翼的可移动部,将直升机的重心的位置始终定位在主旋翼轴的轴线上(例如,参见专利文献1)。使用该技术能够实现直升机的机体的平衡调节。
引用列表
专利文献
专利文献1:日本专利申请公开第H7-17491号
发明内容
本发明要解决的问题
然而,在诸如驱动螺旋桨的马达的可移动部与机体即机身一体化的无人驾驶飞行器中,无法通过根据专利文献1中描述的技术调节重心的位置来平衡机体。
鉴于这样的情况而做出了本技术,并且本技术旨在使得可以容易地平衡机体。
问题的解决方案
根据本技术的第一方面的无人驾驶飞行器包括:使多个螺旋桨旋转的多个马达;使重心位置调节构件移动的可移动部;以及控制重心位置调节构件通过可移动部的移动的控制单元。
利用根据本技术的第一方面的驱动方法或程序,具有使多个螺旋桨旋转的多个马达和使重心位置调节构件移动的可移动部的无人驾驶飞行器控制重心位置调节构件通过可移动部的移动。
根据本技术的第一方面,在具有使多个螺旋桨旋转的多个马达和使重心位置调节构件移动的可移动部的无人驾驶飞行器中,控制重心位置调节构件通过可移动部的移动。
根据本技术的第二方面的无人驾驶飞行器包括:可移动部,其使多个调节构件移动;以及控制单元,其基于指示所生成的风的方向和风力的预测信息来调节机体的取向,并且控制调节构件通过可移动部的移动,使得多个调节构件在彼此不同的多个方向上且远离机体的中心位置移动。
利用根据本技术的第二方面的驱动方法或程序,具有使多个调节构件移动的可移动部的无人驾驶飞行器基于指示所生成的风的方向和风力的预测信息来调节机体的取向,并且控制调节构件通过可移动部的移动,使得多个调节构件在彼此不同的多个方向上且远离机体的中心位置移动。
根据本技术的第二方面,在具有使多个调节构件移动的可移动部的无人驾驶飞行器中,基于指示所生成的风的方向和风力的预测信息来调节机体的取向,并且控制调节构件通过可移动部的移动,使得多个调节构件在彼此不同的多个方向上且远离机体的中心位置移动。
发明的效果
根据本技术的第一方面和第二方面,可以容易地平衡机体。
应注意,本文中描述的效果不一定受限,并且可以是本公开内容中描述的任何效果。
附图说明
图1是说明重心的位置的调节的图。
图2是说明重心的位置的调节的图。
图3是示出电池可移动部的配置示例的图。
图4是示出无人驾驶飞行器的功能配置示例的图。
图5是说明第一次起飞时的飞行控制处理的流程图。
图6是说明强风对策的图。
图7是示出无人驾驶飞行器的功能配置示例的图。
图8是说明强风对策控制处理的流程图。
图9是示出计算机的配置示例的图。
具体实施方式
下面将参照附图描述应用本技术的实施方式。
<第一实施方式>
<关于本技术>
本技术是通过基于使螺旋桨旋转的马达的旋转速度在保持诸如螺旋桨和马达的可移动部与无人驾驶飞行器的机体之间的位置关系的同时移动重心位置调节构件来调节具有多个螺旋桨的无人驾驶飞行器的重心的位置。这使得可以容易地平衡机体。
应注意,重心位置调节构件可以是诸如安装在无人驾驶飞行器上的电池、重心位置调节的重量以及装载在无人驾驶飞行器上的有效载荷(负载)的任何东西。然而,下面将描述重心位置调节构件是电池的情况。
例如,当诸如万向相机、各种传感器和负载的有效载荷安装在无人驾驶飞行器上时,无人驾驶飞行器的重心的位置根据有效载荷的重量和安装位置而改变。另外,无人驾驶飞行器具有电池占据机体重量的大部分的特性。
因此,在本技术中,通过利用这样的特性,通过使电池相对于机体移动来优化无人驾驶飞行器的机体的重心的位置。
下面将更详细地描述本技术。
通常,无人驾驶飞行器的机体控制由螺旋桨部的马达根据要安装在无人驾驶飞行器上的有效载荷的重量来执行。
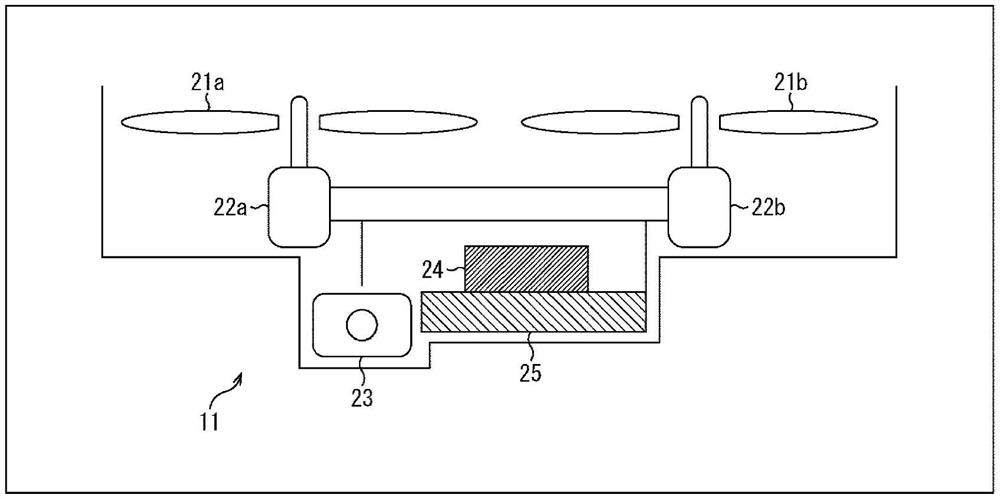
具体地,例如,无人驾驶飞行器的外部配置如图1中那样。应注意,图1是无人驾驶飞行器11的前视图。
在该示例中,无人驾驶飞行器11设置有作为驱动无人驾驶飞行器11(使其飞行)的驱动单元的螺旋桨21a和螺旋桨21b以及作为使螺旋桨21a和螺旋桨21b旋转的旋转驱动单元的马达22a和马达22b。
特别地,在此,例如,螺旋桨21a和螺旋桨21b并排设置在二维平面上,并且马达22a和马达22b具有检测它们自身的旋转速度即螺旋桨21a和螺旋桨21b的旋转速度的旋转速度检测功能。
应注意,在下文中,螺旋桨21a和螺旋桨21b在不特别需要将它们彼此区分的情况下将被简称为螺旋桨21,并且马达22a和马达22b在不特别需要将它们彼此区分的情况下将被简称为马达22。另外,在下文中,马达22a的旋转速度也具体被称为旋转速度ra,并且马达22b的旋转速度也具体被称为旋转速度rb。
无人驾驶飞行器11设置有用作捕获周围物体的图像的图像捕获单元的万向相机23以及向无人驾驶飞行器11的每个单元提供电力的电池24。
此外,由于在此电池24是用于调节无人驾驶飞行器11的重心的位置的重心位置调节构件,因此无人驾驶飞行器11设置有用于使电池24移动的电池可移动部25。
例如,如图1的示例中那样,在电池24相对于无人驾驶飞行器11大致定位在中心处并且万向相机23定位在图中的左侧上的情况下,无人驾驶飞行器11的重心的位置从中心向图中的左侧即螺旋桨21a侧偏离。这是因为相对于无人驾驶飞行器11的中心存在于图中的左侧上的万向相机23比相对于无人驾驶飞行器11的中心存在于图中的右侧上的电池24和电池可移动部25重。
在这样的情况下,由于无人驾驶飞行器11向图中的左侧即螺旋桨21a侧倾斜,因此无人驾驶飞行器11增大旋转速度ra,使得旋转速度ra大于旋转速度rb以保持机体的平衡。利用这种布置,无人驾驶飞行器11变为相对于地面水平,并且保持平衡。
相比之下,在无人驾驶飞行器11向图中的右侧即螺旋桨21b侧倾斜的情况下,无人驾驶飞行器11增大旋转速度rb,使得旋转速度rb被控制为大于旋转速度ra,并且保持机体的平衡。
在此,如图1中示出的示例中那样,在万向相机23设置在无人驾驶飞行器11的螺旋桨21a侧上并且机体的重心向螺旋桨21a侧偏离的情况下,在无人驾驶飞行器11的飞行期间持续地保持旋转速度ra>旋转速度rb。
如果旋转速度ra始终大于旋转速度rb的状态以这种方式持续,则与马达22b相比,马达22a的劣化进一步。
由于在无人驾驶飞行器11的重心的位置变得不平衡时每个马达22的劣化的程度变得不平衡,因此优选的是,无人驾驶飞行器11的重心的位置定位在机体的中心处,使得每个马达22的旋转速度变得尽可能相等。
因此,在本技术中,为了平衡无人驾驶飞行器11的机体,首先通过在执行由马达22进行的控制之前根据诸如万向相机23的有效载荷的重量和布置位置移动电池24来调节机体的重心的位置。
具体地,在图1的示例中,由于无人驾驶飞行器11的机体的重心因为万向相机23的安装而向螺旋桨21a侧偏离,因此电池可移动部25通过将电池24移动到螺旋桨21b侧来调节重心。
特别地,在此,电池可移动部25能够使电池24在图中的左右方向上移动,并且通过将电池24移动到螺旋桨21b侧来执行调节,使得机体的重心的位置成为无人驾驶飞行器11的中心位置。
应注意,在下文中,从无人驾驶飞行器11的中心观看的螺旋桨21a的方向也将被特别地称为A侧,并且从无人驾驶飞行器11的中心观看的螺旋桨21b的方向也将被特别地称为B侧。另外,在下文中,无人驾驶飞行器11的机体的中心位置也将被称为机体中心位置。
因此,电池可移动部25能够在保持(不改变)机体与螺旋桨21和马达22之间的位置关系的同时使电池24相对于无人驾驶飞行器11的机体独立地向A侧或B侧移动。
然而,电池24通过电池可移动部25的移动受到限制,并且如果电池24在某种程度上向A侧或B侧移动,则有时由于物理限制而无法进一步使电池24向A侧或B侧移动。
例如,在电池24的可移动范围内最靠近A侧的位置被称为A侧末端,并且在电池24的可移动范围内最靠近B侧的位置被称为B侧末端。
在这种情况下,电池24的位置不能在A侧末端上进一步向A侧移动,并且类似地,电池24的位置不能在B侧末端上进一步向B侧移动。
取决于诸如万向相机23的有效载荷的重量和布置位置,即使电池24移动到A侧末端或B侧末端,无人驾驶飞行器11的重心的位置也可能不在机体中心位置处。因此,仅在重心的位置不能再通过电池24的移动来调节的情况下,无人驾驶飞行器11才根据该状态调节每个马达22的旋转速度,以保持机体的平衡。
例如,在无人驾驶飞行器11起飞之后,无人驾驶飞行器11在无人驾驶飞行器11保持水平(平衡)的状态下评估旋转速度ra和旋转速度rb。
此时,例如,如果旋转速度ra与旋转速度rb之间的差(ra-rb)等于或大于预定的正阈值|t|,则电池24向B侧(B方向)移动预定单位变化量。
然后,由于电池24被移动,因此无人驾驶飞行器11控制每个马达22的旋转速度使得保持机体的平衡,并且因此此后再次评估旋转速度ra和旋转速度rb,并且重复电池24的移动和旋转速度的评估,直到差(ra-rb)变得小于阈值|t|为止。
类似地,作为无人驾驶飞行器11起飞之后的旋转速度的评估的结果,如果差(ra-rb)等于或小于预定的负阈值-|t|,则电池24向A侧(A方向)移动预定单位变化量。
然后,由于每个马达22的旋转速度根据电池24的移动来控制,因此此后再次评估旋转速度ra和旋转速度rb,并且重复电池24的移动和旋转速度的评估,直到差(ra-rb)变得大于阈值-|t|。
因此,在无人驾驶飞行器11中,在差(ra-rb)不是从阈值|t|和阈值-|t|确定的预定范围内的值的情况下,通过电池24的移动来调节机体的重心的位置。应注意,在此,预定范围是大于阈值-|t|且小于阈值|t|的值的范围。
以这种方式,无人驾驶飞行器11比较马达22的旋转速度,并且使电池24在与比较结果相对应的方向上移动。利用这种布置,可以通过根据安装在无人驾驶飞行器11上的诸如万向相机23的有效载荷的重量和布置位置将电池24在适当的方向上移动适当的距离来调节无人驾驶飞行器11的重心的位置。
应注意,已经将无人驾驶飞行器11中设置的马达22的数量为两个的情况作为示例进行描述,但是即使在马达22的数量是三个或更多的情况下也可以通过类似的处理来调节重心的位置。例如,在马达22的数量为偶数的情况下,马达22中的两个马达22可以成一对,可以对每对执行上述旋转速度评估,并且可以根据评估结果移动电池24。
具体地,如图2中所示,例如,假定无人驾驶飞行器11设置有四个螺旋桨和驱动这些螺旋桨的四个马达。应注意,图2中与图1中的部分相对应的部分被赋予相同的附图标记,并且将适当地省略其描述。另外,在图2中,省略了每个马达的图示。
在该示例中,无人驾驶飞行器11除了图1中示出的螺旋桨21a和螺旋桨21b之外还设置有螺旋桨21a’和螺旋桨21b’。
在此,螺旋桨21a和螺旋桨21b在图中的水平方向上并排设置在图中的上侧上,并且螺旋桨21a’和螺旋桨21b’在水平方向上并排设置在螺旋桨21a和螺旋桨21b的图下方。
另外,螺旋桨21a和21a’在图中的竖直方向上并排设置,并且螺旋桨21b和21b’在图中的竖直方向上并排设置。特别地,在无人驾驶飞行器11中,螺旋桨21a、螺旋桨21b、螺旋桨21a’和螺旋桨21b’并排设置在二维平面中。
此外,在该示例中,无人驾驶飞行器11设置有未示出的马达22a’和马达22b’,马达22a’和马达22b’是分别使螺旋桨21a’和21b’旋转的旋转驱动单元。
应注意,在下文中,螺旋桨21a、螺旋桨21b、螺旋桨21a’和螺旋桨21b’在不特别需要将它们彼此区分的情况下将被简称为螺旋桨21。另外,在下文中,马达22a、马达22b、马达22a’和马达22b’在不特别需要将它们彼此区分的情况下将被简称为马达22。
此外,在下文中,马达22a’和马达22b’的旋转速度将分别称为旋转速度ra’和rb’。
在图2的示例中,四个马达22(螺旋桨21)被分成两对。
具体地,在图2中示出的示例中,例如,电池24能够在图中的左右方向上线性移动。在图2中,直线L11表示电池可移动线(电池可移动方向),其是电池24能够移动的方向。
当穿过机体中心位置并且与电池可移动线正交的直线L12为分割线时,马达22即螺旋桨21被分割线分为组A和组B。
在此,假定相对于分割线定位在图中的左侧上的马达22a和马达22a’属于组A,并且相对于分割线定位在图中的右侧上的马达22b和马达22b’属于组B。
那么,属于组A的马达22和组B中的相对于分割线存在于与马达22对称的位置处的马达22成一对。
因此,在此,马达22a和马达22b成一对,并且马达22a’和马达22b’成另一对。
然后,对于一对马达22a和马达22b,将差(ra-rb)与阈值|t|或阈值-|t|进行比较,类似于以上示例。
另外,对于一对马达22a’和马达22b’,类似地,将差(ra’-rb’)和阈值|t|或阈值-|t|进行比较。
然后,电池24沿着电池可移动线移动,直到差(ra-rb)和差(ra’-rb’)变得大于阈值-|t|且小于阈值|t|为止,并且重复执行电池24的移动和旋转速度的评估。
应注意,尽管在图1中说明了电池24移动到A侧或B侧,但是在图2的示例中电池24在与电池可移动线平行的方向上移动。特别地,与电池可移动线平行的方向中的在图中的左侧上的方向对应于A侧,并且与电池可移动线平行的方向中的在图中的右侧上的方向对应于B侧。
另外,尽管已经描述了电池24在直线上移动的示例,但是可以基于对每个马达22的旋转速度的评估将电池24移动到二维平面上的任意位置。
此外,尽管在图2中描述了为四个螺旋桨21设置一个电池24的示例,但是可以为每对螺旋桨21设置一个电池作为重心位置调节构件。具体地,例如,在图2的示例中,仅需一个电池来根据差(ra-rb’)与阈值之间的比较结果在连接螺旋桨21a和螺旋桨21b’的直线上移动,并且仅需另一个电池来根据差(ra’-rb)与阈值之间的比较结果在连接螺旋桨21a’和螺旋桨21b的直线上移动。
<关于电池可移动部的配置>
接下来,将描述电池可移动部25的具体配置示例。
例如,电池可移动部25可以如图3中所示那样被配置。
在图3中示出的示例中,电池可移动部25具有线性基部轨道51、设置在基部轨道51上的电池座52、齿轮箱53、滑轮54、滑轮55和传送带56。
也就是说,齿轮箱53和滑轮54设置在基部轨道51的一端处,并且滑轮55设置在基部轨道51的另一端处。然后,在用作旋转轴的两个滑轮54和55的部分处设置一个传送带56,并且将保持电池24的电池座52固定至传送带56。
另外,在齿轮箱53内部设置马达61、传动齿轮62和传动齿轮63,如图中的右侧上所示。
当电池24移动时,电池可移动部25使马达61旋转。当马达61的旋转轴旋转时,固定至旋转轴的传动齿轮62和被设置成与传动齿轮62啮合的传动齿轮63旋转,由此与传动齿轮63啮合的滑轮54旋转。
然后,响应于滑轮54的旋转,传送带56旋转并且滑轮55也旋转,并且因此,固定至传送带56的电池座52和由电池座52保持的电池24沿着基部轨道51线性移动。
应注意,尽管在此已经描述了电池可移动部25通过使马达61旋转而机械地使电池24移动的示例,但是电池可移动部25使电池24移动的机构不限于图3中的示例并且可以是任何种类。例如,可以使用超导电磁体来通过磁力使电池24移动,或者可以使用致动器等来使电池24移动。
可替选地,例如,具有螺旋桨21和固定在其末端处的马达22的转子臂可以具有一定的重量,并且转子臂可以用作重心位置调节构件。在这样的情况下,无人驾驶飞行器11通过使转子臂伸展和收缩来调节重心的位置。可替选地,可以将作为重心位置调节构件的电池等固定至转子臂,并且可以通过使转子臂伸展和收缩来调节重心的位置。
<无人驾驶飞行器的功能配置示例>
接下来,将描述无人驾驶飞行器11的功能配置示例。
在此,将描述图1中示出的具有两个螺旋桨21的无人驾驶飞行器11的配置。例如,这样的无人驾驶飞行器11的功能配置如图4所示的那样。应注意,图4中的与图1中的部分相对应的部分被赋予相同的附图标记,并且将适当地省略其描述。
图4中示出的无人驾驶飞行器11具有螺旋桨21a、螺旋桨21b、马达22a、马达22b、驱动控制单元91a、驱动控制单元91b、位置测量单元92、飞行计划控制单元93、重量测量单元94、万向相机23、倾斜检测单元95、记录单元96、电池可移动部25、电池24和控制单元97。
驱动控制单元91a和驱动控制单元91b根据来自控制单元97的指令控制马达22a和马达22b的驱动。
另外,马达22a将驱动时其自身的旋转速度ra提供给控制单元97,并且类似地,马达22b将驱动时其自身的旋转速度rb提供给控制单元97。应注意,马达22的旋转速度可以由驱动控制单元91检测,或者可以由控制单元97等从与马达22的驱动有关的内部变量检测。
此外,为了简化说明,描述了无人驾驶飞行器11设置有两个螺旋桨21的示例。然而,如图2中所示,无人驾驶飞行器11可以设置有四个螺旋桨21。
在这样的情况下,无人驾驶飞行器11设置有螺旋桨21a’、螺旋桨21b’、马达22a’、马达22b’以及控制马达22a’和马达22b’的相应驱动的驱动控制单元91a’和驱动控制单元91b’。
应注意,在下文中,驱动控制单元91a、驱动控制单元91b、驱动控制单元91a’和驱动控制单元91b’在不特别需要将它们彼此区分的情况下将被简称为驱动控制单元91。
包括例如全球定位系统(GPS)的位置测量单元92测量无人驾驶飞行器11在真实空间中的位置,并且将测量结果提供给飞行计划控制单元93。
飞行计划控制单元93基于从控制单元97提供的信息和从位置测量单元92提供的位置的测量结果来生成指示无人驾驶飞行器11的飞行计划的飞行计划信息,并且将飞行计划信息提供给控制单元97,同时适当地与控制单元97交换信息。在此,飞行计划信息是指示诸如无人驾驶飞行器11以什么路线和什么速度飞行的飞行计划的信息。
重量测量单元94测量诸如装载在无人驾驶飞行器11上的万向相机23的装载在无人驾驶飞行器11上的有效载荷的重量,并且将作为测量结果获得的重量信息提供给控制单元97。应注意,在下文中将描述将万向相机23作为有效载荷装载的示例,但是装载在无人驾驶飞行器11上的有效载荷不限于万向相机23,并且可以是任何其他东西。可以装载两个或更多个有效载荷。
重量信息是指示相对于无人驾驶飞行器11的原始重量通过装载有效载荷(万向相机23)而增加的无人驾驶飞行器11的重量的增加量的信息。也就是说,重量信息是指示相对于无人驾驶飞行器11的预定参考重量的重量增加量的信息。
包括例如陀螺仪传感器和相机的倾斜检测单元95检测无人驾驶飞行器11从水平状态的倾斜,即机体相对于地面的倾斜,并且将检测结果提供给控制单元97。
例如,在倾斜检测单元95包括陀螺仪传感器的情况下,输出由陀螺仪传感器的输出指示的倾斜角度等作为机体的倾斜的检测结果。另外,例如,在倾斜检测单元95包括相机的情况下,通过图像识别等从相机捕获的图像中检测机体相对于地面的倾斜角度。
包括例如非易失性存储器的记录单元96记录从控制单元97提供的各种类型的信息,并且将记录的信息提供给控制单元97。
例如,在无人驾驶飞行器11调节机体的重心的位置时使用的重心调节信息根据需要被记录在记录单元96中。
例如,重心调节信息包括重量信息、电池位置信息和旋转速度差信息。换言之,记录单元96记录彼此相关联的重量信息、电池位置信息和旋转速度差信息。应注意,尽管在此已经给出了重心调节信息包括旋转速度差信息的描述,但是重心调节信息可以不包括旋转速度差信息。
在此,电池位置信息是指示在由同一重心调节信息中包括的重量信息指示的重量被测量时无人驾驶飞行器11在飞行时处于平衡状态下的电池24的位置的信息。也就是说,电池位置信息是指示在通过电池24的移动调节重心的位置之后的电池24的位置的信息。具体地,电池位置信息可以是指示电池24的移动方向和移动量的信息。
另外,旋转速度差信息是指示在由同一重心调节信息中包括的重量信息指示的重量被测量时在电池24存在于由同一重心调节信息中包括的电池位置信息指示的位置处并且无人驾驶飞行器11在飞行时平衡的状态下在旋转速度ra与旋转速度rb之间的差(ra-rb)的信息。
因此,例如,在由重量测量单元94测量预定重量的情况下,如果包括指示重量的重量信息的重心调节信息已经记录在记录单元96中,则可以在无人驾驶飞行器11中容易地实现机体的平衡。也就是说,如果读出在重心调节信息中包括的电池位置信息和旋转速度差信息,电池24移动到由电池位置信息指示的位置,并且每个马达22的旋转速度被控制成使得差(ra-rb)变为由旋转速度差信息指示的差,则机体的平衡应当实现。
在无人驾驶飞行器11中,在记录单元96中未记录包括通过测量获得的重量信息的重心调节信息作为飞行时的重量测量结果的情况下,新生成包括重量信息的重心调节信息并将其记录在记录单元96中。
在记录单元96中记录包括通过测量获得的重量信息的重心调节信息作为飞行时的重量测量结果但是机体的平衡通过使用重心调节信息甚至无法实现的情况下,新生成重心调节信息并且更新记录单元96中的重心调节信息。
控制单元97控制无人驾驶飞行器11的整体操作。例如,控制单元97基于从飞行计划控制单元93提供的飞行计划信息和从马达22提供的旋转速度来控制驱动控制单元91和电池可移动部25,并且控制无人驾驶飞行器11的飞行并平衡机体。
<第一次起飞时的飞行控制处理的说明>
顺便提及,在无人驾驶飞行器11在启动之后第一次起飞的情况下,无人驾驶飞行器11执行第一次起飞时的飞行控制处理,这是用于执行重量测量并且根据需要生成重心调节信息的处理。下面将参照图5的流程图描述图4中示出的无人驾驶飞行器11要执行的第一次起飞时的飞行控制处理。
在无人驾驶飞行器11起飞时,驱动控制单元91根据来自控制单元97的指令来控制马达22的驱动。通过根据驱动控制单元91的控制进行旋转,马达22使连接至马达22自身的旋转轴的螺旋桨21旋转,从而使无人驾驶飞行器11垂直起飞。
当无人驾驶飞行器11起飞时,重量测量单元94在步骤S11中执行重量测量,并且将所得的重量信息提供给控制单元97。
在步骤S12中,控制单元97确定包括指示与从重量测量单元94提供的重量信息相同的重量的重量信息的重心调节信息是否被记录在记录单元96中。换言之,确定与通过测量获得的重量相对应的电池位置信息是否被记录在记录单元96中。
如果在步骤S12中确定未记录重心调节信息,则不执行步骤S13的处理,然后处理进行至步骤S14。
另一方面,在在步骤S12中确定记录了重心调节信息的情况下,控制单元97从记录单元96读出包括指示与从重量测量单元94提供的重量信息相同的重量的重量信息的重心调节信息,此后处理进行至步骤S13。
在步骤S13中,电池可移动部25移动电池24。
也就是说,控制单元97指示电池可移动部25移动电池24,使得电池24移动到由从记录单元96读出的重心调节信息中包括的电池位置信息指示的位置。然后,电池可移动部25响应于控制单元97的指令来移动电池24。
同时,控制单元97基于重心调节信息和从马达22提供的旋转速度指示驱动控制单元91驱动和控制马达22,使得马达22的旋转速度之差(ra-rb)变为由重心调节信息中包括的旋转速度差信息指示的差。
然后,响应于来自控制单元97的指令,驱动控制单元91控制马达22的旋转驱动,使得马达22的旋转速度变为与关于其给出指令的差(ra-rb)相对应的适当旋转速度。
如果以这种方式基于重心调节信息来调节电池24的位置和马达22的旋转速度,则无人驾驶飞行器11的机体应基本上进入平衡状态。
在执行了步骤S13的处理之后,处理进行至步骤S14。
如果执行步骤S13的处理或者在步骤S12中确定未记录重心调节信息,则执行步骤S14的处理。
在步骤S14中,控制单元97基于从倾斜检测单元95提供的机体的倾斜的检测结果来控制马达22的旋转,使得无人驾驶飞行器11的机体变为水平即进入平衡状态。也就是说,控制单元97指示驱动控制单元91控制马达22的旋转驱动。
然后,每个驱动控制单元91响应于来自控制单元97的指令来控制马达22的旋转驱动,以适当地增大或减小马达22的旋转速度。因此,无人驾驶飞行器11的机体进入平衡状态。
在步骤S15中,控制单元97基于从马达22提供的旋转速度确定旋转速度ra与旋转速度rb之间的差(ra-rb)是否等于或大于阈值|t|,即ra-rb≥|t|是否为真。
在在步骤S15中确定ra-rb≥|t|为真的情况下,即在无人驾驶飞行器11的机体的重心向A侧倾斜的情况下,控制单元97在步骤S16中确定电池24是否能够移动到B侧。
例如,在步骤S16中,在电池24的当前位置不是B侧末端的位置的情况下,确定电池能够移动到B侧。
在在步骤S16中确定电池24不能移动到B侧的情况下,尽管机体的重心不在机体中心位置处并且电池24不能再向B侧移动,但是电池24已经存在于B侧末端的位置处,并且因此处理进行至步骤S21。
在这种情况下,差(ra-rb)太大,使得每个马达22的旋转速度偏离,但是通过电池24的位置调节不能再减小旋转速度的偏离。
另一方面,在在步骤S16中确定电池能够移动到B侧的情况下,控制单元97指示电池可移动部25将电池24移动到B侧,此后处理进行至步骤S17。也就是说,控制单元97通过电池可移动部25控制电池24向B侧的移动。
在步骤S17中,响应于来自控制单元97的指令,电池可移动部25在保持螺旋桨21或马达22与机体之间的位置关系的同时使电池24向B侧移动预定单位变化量(距离)。
在电池24移动到B侧之后,处理返回到步骤S14,并且重复上述处理。
特别地,在这种情况下,当电池24向B侧移动时,机体的重心被调节为更靠近机体中心位置的位置,但是失去机体的平衡,并且因此马达22的旋转速度在步骤S14中被调节成使得机体变为水平。
另外,在在步骤S15中确定ra-rb≥|t|不为真的情况下,即在差(ra-rb)小于阈值|t|的情况下,处理进行至步骤S18。
在步骤S18中,控制单元97基于从马达22提供的旋转速度确定旋转速度ra与旋转速度rb之间的差(ra-rb)是否等于或小于阈值-|t|,即ra-rb≤-|t|是否为真。
在在步骤S18中确定ra-rb≤-|t|为真的情况下,即在无人驾驶飞行器11的机体的重心向B侧倾斜的情况下,控制单元97在步骤S19中确定电池24是否能够移动到A侧。
例如,在步骤S19中,在电池24的当前位置不是A侧末端的位置的情况下,确定电池能够移动到A侧。
在在步骤S19中确定电池24不能移动到A侧的情况下,尽管机体的重心不在机体中心位置处并且电池24不能再向A侧移动,但是电池24已经存在于A侧末端的位置处,并且因此处理进行至步骤S21。
另一方面,在在步骤S19中确定电池能够向A侧移动的情况下,控制单元97指示电池可移动部25使电池24向A侧移动,此后处理进行至步骤S20。也就是说,控制单元97通过电池可移动部25控制电池24向A侧的移动。
在步骤S20中,响应于来自控制单元97的指令,电池可移动部25在保持螺旋桨21或马达22与机体之间的位置关系的同时使电池24向A侧移动预定单位变化量(距离)。
在电池24移动到A侧之后,处理返回到步骤S14,并且重复上述处理。
特别地,在这种情况下,当电池24向A侧移动时,机体的重心被调节为更靠近机体中心位置的位置,但是失去机体的平衡,并且因此马达22的旋转速度在步骤S14中被调节成使得机体变为水平。
另一方面,在在步骤S18中确定ra-rb≤-|t|不为真的情况下,此后处理进行至步骤S21。
在这种情况下,差(ra-rb)大于阈值-|t|且小于阈值|t|。也就是说,机体是平衡的,并且差(ra-rb)足够小,使得每个马达22的旋转速度没有偏离。在这种状态下,机体的重心的位置在机体中心位置处。
如果在步骤S16中确定电池不能移动到B侧,如果在步骤S18中确定ra-rb≤-|t|不为真或者如果在步骤S19中确定电池不能移动到A侧,则执行步骤S21的处理。
在步骤S21中,控制单元97生成重心调节信息。
具体地,控制单元97生成重心调节信息,该重心调节信息包括在步骤S11中获得的重量信息、指示电池24的当前位置即移动之后的电池24的位置的电池位置信息以及指示当前马达22的旋转速度的差(ra-rb)的旋转速度差信息。
在步骤S22中,控制单元97将在步骤S21中生成的重心调节信息提供给记录单元96并且使记录单元96记录重心调节信息,并且第一次起飞时的飞行控制处理结束。
应注意,在步骤S22中,在已经将与在步骤S21中生成的重心调节信息相同的重心调节信息记录在记录单元96中的情况下,不执行重心调节信息的记录。另外,在与在步骤S21中生成的重心调节信息不同但具有相同重量信息的重心调节信息被记录在记录单元96中的情况下,重心调节信息被重写到在步骤S21中生成的重心调节信息并且更新重心调节信息。
以上述方式,无人驾驶飞行器11基于马达22的旋转速度的差(ra-rb)使电池24移动,从而调节机体的重心的位置。通过这样调节重心的位置,可以容易地平衡机体。
此外,即使安装在无人驾驶飞行器11上的诸如万向相机23的有效载荷的重量发生变化,也可以仅通过移动电池24来容易地调节机体的重心的位置。另外,由于机体的重心的位置固定在尽可能靠近机体中心位置的位置——即马达22的旋转速度差被最小化的位置处,因此可以使马达22的劣化变化最小化。
应注意,在步骤S15和步骤S18中与差(ra-rb)相比的阈值|t|和阈值-|t|可以是预定值,或者可以由控制单元97基于在步骤S11中获得的重量信息来确定。
另外,可以基于在步骤S11中获得的重量信息来确定步骤S17或步骤S20中电池24的移动量,即预定单位变化量,或者可以在电池24沿预定方向移动相对于重量信息确定的距离之后执行步骤S14中及步骤S14之后的处理。
<第二实施方式>
<关于强风对策>
顺便提及,如果在无人驾驶飞行器11的飞行期间存在强风,则无人驾驶飞行器11可能被吹动。因此,在预测有强风的情况下,通过移动重心位置调节构件以增大惯性矩,可以抑制无人驾驶飞行器11被吹动和倾斜。
具体地,例如,假定如图6中的左侧上所示在无人驾驶飞行器11中设置有四个螺旋桨21。应注意,图6中的与图1或图2中的部分相对应的部分被赋予相同的附图标记,并且将适当地省略其描述。
在图6中示出的示例中,无人驾驶飞行器11设置有可沿由直线L11指示的电池可移动线移动的电池121a和电池121b。
在此,电池121a可从机体中心位置沿图中的左方向移动到任意位置,并且电池121b可从机体中心位置沿图中的右方向移动到任意位置。
也就是说,电池121a和121b中的每一个可在彼此不同的两个方向上且远离机体中心位置移动,使得在不改变机体的重心的位置的情况下惯性矩增大。电池121a和121b可以在不改变螺旋桨21或马达22与机体之间的位置关系的情况下移动。
在下文中,从机体中心位置到电池121a的位置的距离也称为距离d,并且从机体中心位置到电池121b的位置的距离也称为距离d’。另外,在下文中,电池121a和电池121b在不特别需要将它们彼此区分的情况下被简称为电池121。
这两个电池121用作上述重心位置调节构件,并且还用作用于调节惯性矩的调节构件,并且用于调节惯性矩的调节构件和重心位置调节构件可以不同。
例如,在预料强风朝向无人驾驶飞行器11吹动的情况下,与强风吹动的方向正交的直线、穿过机体中心位置并与地面平行的直线被认为是相对于机体的倾斜的旋转轴。在图6的示例中,假定强风来自如图中的右侧上所示的由箭头A11指示的方向,则与箭头A11正交的直线L21成为旋转轴。
因此,在无人驾驶飞行器11中,通过增大机体相对于旋转轴的惯性矩,机体可能不太可能由于强风而倾斜。
例如,为了简化说明,假定无人驾驶飞行器11的重心的位置始终在机体中心位置处。此时,假定两个电池121存在于满足距离d=d’=d1的位置处,以便平衡处于无强风的正常状态(在下文中也称为正常状态)下的机体。在此,满足距离d=d’=d1的位置例如是最靠近机体中心位置的位置,并且在下文中这样的电池121的位置将被称为正常位置。
应注意,在无人驾驶飞行器11的重心的位置不在机体中心位置处的情况下,仅通过使电池121a和电池121b中的任一个从正常位置沿远离机体中心位置的方向移动来要求无人驾驶飞行器的重心的位置在机体中心位置处。
假定在电池121处于正常位置的状态下,例如,预测强风来自由箭头A11指示的方向。
在这种情况下,无人驾驶飞行器11调节机体的取向,使得由箭头A11指示的强风方向与电池可移动线的方向平行,如图中的右侧上所示,然后移动电池121使得建立距离d=d’=d2(其中d2>d1)。
也就是说,无人驾驶飞行器11使电池121的位置从正常位置沿着远离机体中心位置的方向移动,使得距离d=d’增大。
应注意,距离d=d’=d2为真的电池121的位置在下文中将被称为强风对策位置。
通过这样改变机体的取向使得强风方向和电池可移动线彼此平行并且将电池121的位置从正常位置移动到强风对策位置,机体相对于直线L21所示的旋转轴的惯性矩变大。这可以抑制无人驾驶飞行器11的机体由于强风而旋转,并且容易平衡机体。
另外,例如,将电池121移动到强风对策位置等的机构可以是除参照图3描述的机构以外的任何机构。
例如,可以通过将一些电池121固定至能够自由地改变半径(直径)的圆形伸缩管并通过使伸缩管伸展和收缩而调节半径来调节惯性矩的大小。
在这种情况下,例如,伸缩管最收缩的状态是电池121处于正常位置的状态,以及相反,伸缩管最伸展的状态是电池121处于强风对策位置的状态。
<无人驾驶飞行器的功能配置示例>
在如上所述采取强风对策的情况下,无人驾驶飞行器11的功能配置例如如图7中所示。
应注意,图7中的与图4或图6中的部分相对应的部分被赋予相同的附图标记,并且将适当地省略其描述。另外,类似于图4中的情况,图7中示出的无人驾驶飞行器11也没有设置螺旋桨21a’、螺旋桨21b’、马达22a’、马达22b’、驱动控制单元91a’和驱动控制单元91b’,但是可以设置那些框。
图7中示出的无人驾驶飞行器11具有螺旋桨21a、螺旋桨21b、马达22a、马达22b、驱动控制单元91a、驱动控制单元91b、位置测量单元92、飞行计划控制单元93、重量测量单元94、万向相机23、倾斜检测单元95、记录单元96、电池可移动部25、电池121a、电池121b、强风信息获取单元151和控制单元97。
在一方面,图7中示出的无人驾驶飞行器11的配置与图4中示出的无人驾驶飞行器11的配置的不同之处在于,代替电池24设置了电池121并且新设置了强风信息获取单元151,而在其他方面,图7中示出的无人驾驶飞行器11的配置与图4中示出的无人驾驶飞行器11的配置相同。
在图7中示出的无人驾驶飞行器11中,电池121a和电池121b向无人驾驶飞行器11的每个单元提供电力,并且这些电池121既用作用于调节惯性矩的调节构件,又用作重心位置调节构件。
另外,电池可移动部25具有能够独立地即单独地移动电池121a和电池121b的机构,并且根据来自控制单元97的指令来移动电池121。
强风信息获取单元151获取指示在空间中的预定位置处在预定时间的风向(风的方向)和强度(风力)的预测的强风预测信息作为天气预测信息,并且将信息提供给控制单元97。强风信息获取单元151具有通信单元161、传感器单元162和预测单元163。
在此,强风预测信息包括风力矢量信息、预测位置信息和预测时间信息。
风力矢量信息是指示预测的风强度(风力)及其风向的信息,并且例如是在xyz正交坐标系中包括指示x方向上的风力的元素x、指示y方向上的风力的元素y以及指示z方向上的风力的元素z的矢量信息。
预测位置信息是指示具有由风力矢量信息指示的风力和方向的风被预测发生的位置(在下文中也称为预测位置)的信息。预测位置信息所指示的预测位置由例如纬度、经度和海拔表示。
预测时间信息是指示具有由风力矢量信息指示的风力和方向的风被预测在由预测位置信息指示的预测位置处发生的时间(在下文中也称为预测时间)的信息。
因此,风力矢量信息是指示被预测在预测时间在预测位置被观测即被预测发生的风的方向和风力的信息。
强风信息获取单元151的通信单元161从外部服务器等获取包括这样的风力矢量信息、预测位置信息和预测时间信息的强风预测信息。
也就是说,例如,通信单元161经由控制单元97从飞行计划控制单元93或者直接从飞行计划控制单元93获取通过位置测量单元92获得的无人驾驶飞行器11的位置的测量结果,并且将测量结果经由无线或有线通信网络发送至服务器。
在此假定,与预测位置信息类似,指示无人驾驶飞行器11的位置的信息也是由纬度、经度和海拔表示的信息。
当以这种方式将通过位置测量单元92获得的指示无人驾驶飞行器11的位置的信息作为测量结果发送至服务器时,服务器响应于指示无人驾驶飞行器11的位置的信息的发送而发送指示由该信息指示的位置作为预测位置的强风预测信息。
通过接收从服务器发送的强风预测信息,通信单元161可以获取指示在无人驾驶飞行器11的位置处的每个时间的风向和风力的强风预测信息。通信单元161以这种方式向控制单元97提供从外部服务器获取的强风预测信息。
另外,由于强风信息获取单元151设置有传感器单元162和预测单元163,因此强风信息获取单元151可以执行预测以生成强风预测信息。
例如,传感器单元162包括风力传感器和陀螺仪传感器,并且预测单元163基于传感器单元162的输出预测在几个最近的预测时间处的风向和风力,并且生成强风预测信息。
作为具体示例,例如,将描述使用风力传感器作为传感器单元162的情况。在这种情况下,例如,在无人驾驶飞行器11的彼此不同的多个位置处朝向不同方向附接有风力传感器,并且这些风力传感器测量从每个方向朝向无人驾驶飞行器11吹动的风的风力。
因此,可以从每个风力传感器的输出获得指示风在预定时间的风向和强度(风力)的风信息。包括每个时间处的风力信息的数据成为指示在无人驾驶飞行器11在空间中的位置处的风的观测结果的时间序列数据。
另外,在这种情况下,预测单元163具有通过学习预先获得的预测器。该预测器是基于风力信息的时间变化模式来预测未来时间的风向和风力的预测器。也就是说,预测器将在几个不同时间的风力信息——即风力信息的时间序列数据作为输入,并且输出在未来几个时间处的风力矢量信息。
因此,预测单元163将从传感器单元162的输出获得的风力信息的时间序列数据输入到预测器,并且执行算术处理。然后,预测单元163基于由于预测器进行的算术处理而获得的每个时间的风力矢量信息以及从飞行计划控制单元93获得的无人驾驶飞行器11的位置的测量结果来生成包括风力矢量信息、预测位置信息和预测时间信息的强风预测信息,并且预测单元163将强风预测信息提供给控制单元97。
此外,当传感器单元162检测无人驾驶飞行器11每个时间的加速度和吹动方向即倾斜方向(倾斜)时,例如可以通过陀螺仪传感器等生成强风预测信息。
在这样的情况下,预测单元163具有通过学习预先获得的预测器。该预测器是基于无人驾驶飞行器11的加速度和倾斜方向的时间变化模式来预测未来时间的风向和风力的预测器。也就是说,该预测器将无人驾驶飞行器11在几个不同时间的加速度和倾斜方向作为输入,并且输出在未来几个时间处的风力矢量信息。
因此,预测单元163将从传感器单元162提供的无人驾驶飞行器11的加速度和倾斜方向的时间序列数据输入到预测器,并且执行算术处理。然后,预测单元163基于由于预测器进行的算术处理而获得的每个时间的风力矢量信息以及从飞行计划控制单元93获得的无人驾驶飞行器11的位置的测量结果来生成包括风力矢量信息、预测位置信息和预测时间信息的强风预测信息,并且预测单元163将强风预测信息提供给控制单元97。
除此之外,例如,预测单元163中包括的预测器可以将风力信息的时间序列数据和无人驾驶飞行器11的加速度和倾斜方向的时间序列数据作为输入,并且输出几个时间处的风力矢量信息。
通过从强风信息获取单元151接收到强风预测信息的提供,控制单元97可以基于强风预测信息掌握在未来时间是否将发生强风或者强风是否将平静下来(风将停止),并且可以采取上述强风对策。
<强风对策控制处理的说明>
接下来,将描述图7中示出的无人驾驶飞行器11的操作。
无人驾驶飞行器11例如通过执行与参照图5描述的第一次起飞时的飞行控制处理类似的处理来调节机体的重心的位置。此时,基于马达22的旋转速度的差异,无人驾驶飞行器11移动电池121a或电池121b,使得机体的重心在机体中心位置处。
另外,当无人驾驶飞行器11起飞时,无人驾驶飞行器11调节机体的重心的位置,并且还执行根据需要采取强风对策的强风对策控制处理。在下文中,将参照图8的流程图描述由无人驾驶飞行器11执行的强风对策控制处理。
在步骤S51中,强风信息获取单元151获取强风预测信息。
具体地,通信单元161将从飞行计划控制单元93获得的通过位置测量单元92得到的无人驾驶飞行器11的位置的测量结果发送至服务器,并且接收响应于此从服务器发送的强风预测信息。通信单元161将这样接收到的强风预测信息提供给控制单元97。
应注意,强风预测信息可以由强风信息获取单元151生成,而不是如上所述获取强风预测信息。在这样的情况下,例如,预测单元163通过基于传感器单元162的输出执行由预测器进行的算术处理来获得风力矢量信息,并且基于所获得的风力矢量信息和位置测量单元92的测量结果来生成强风预测信息。
在步骤S52中,控制单元97基于从强风信息获取单元151即通信单元161提供的强风预测信息来确定是否采取强风对策。
例如,由于可以获得在未来方向上的预定时段中的每个时间的强风预测信息,因此确定在预测发生强风——即根据强风预测信息预测在未来方向上的预定时段内观测到强风的情况下,采取强风对策。
作为具体示例,在步骤S52中确定在在未来方向上的预定时段中的每个时间的强风预测信息中包括的风力矢量信息中甚至存在风力变得等于或大于预定阈值的一个风力矢量信息的情况下,采取强风对策。
在在步骤S52中确定要采取强风对策的情况下,处理进行至步骤S53。
在步骤S53中,控制单元97调节机体的取向,使得电池121的可移动方向即以上提到的电池可移动线在与由强风时的风力矢量信息指示的风向平行的方向上取向。
在此,由强风时的风力矢量信息指示的风向是例如风力矢量信息中的预测时间最靠近风力变为预定阈值或以上的当前时间时的风力矢量信息所指示的风向。
除此之外,例如,可以将由风力变得等于或大于预定阈值的一个或更多个风力矢量信息指示的风向的平均值设置为由强风时的风力矢量信息指示的风向。
例如,控制单元97指示驱动控制单元91控制马达22的旋转驱动,使得电池可移动线在与风向平行的方向上。
然后,每个驱动控制单元91响应于来自控制单元97的指令来控制马达22的旋转驱动以适当地增大或减小马达22的旋转速度。因此,无人驾驶飞行器11的机体的取向被改变使得电池可移动线变得与风向平行。
应注意,在步骤S53中,可以根据对无人驾驶飞行器11的机体的取向的调节来调节万向相机23的取向。在这样的情况下,例如,控制单元97控制万向相机23的旋转机构,使得万向相机23在与机体的旋转方向相反的方向上旋转与机体的旋转角度相同的角度。例如,即使在万向相机23捕获周围环境的情况下,这也可以防止图像捕获受到影响。
在步骤S54中,控制单元97指示电池可移动部25移动电池121,并且使电池可移动部25将电池121移动到强风对策位置。也就是说,控制单元97通过电池可移动部25控制电池121的移动。
电池可移动部25根据控制单元97的指令将电池121从诸如正常位置的任意位置移动到强风对策位置。
应注意,在电池121已经处于强风对策位置的情况下,不执行步骤S54的处理,并且保持电池121处于强风对策位置的状态。
此外,更详细地,例如,由于机体的重心的位置的调节,距离d≠d’,即距离d和距离d’有时彼此不相等。
在这样的情况下,电池可移动部25移动电池121a和电池121b,使得定位成距机体中心位置更远的电池121被定位成在可移动范围内距机体中心位置最远,同时保持电池121a和电池121b相对于机体中心位置之间的相对位置关系。
换言之,每个电池121被移动使得定位成距机体中心位置更远的电池121定位在强风对策位置的位置处,同时保持电池121a和电池121b相对于机体中心位置之间的相对位置关系。这可以在机体的重心的位置保持在机体中心位置时使机体的惯性矩最大化。
在电池121以这种方式移动到强风对策位置之后,处理进行至步骤S56。
另一方面,在在步骤S52中确定不采取强风对策的情况下,即在预计在未来方向上的预定时段中不会发生强风并且不需要强风对策的情况下,处理进行至步骤S55。
在步骤S55中,控制单元97指示电池可移动部25移动电池121,并且使电池可移动部25将电池121移动到正常位置。电池可移动部25根据控制单元97的指令将电池121移动到正常位置。
应注意,在电池121已经处于正常位置的情况下,不执行步骤S55的处理,并且保持电池121的位置处于正常位置的状态。
此外,更详细地,例如,由于机体的重心的位置的调节,距离d≠d’,即距离d和距离d’有时彼此不相等。
在这样的情况下,电池可移动部25移动电池121a和电池121b,使得存在于更靠近机体中心位置的位置处的电池121处于正常位置,同时保持电池121a和电池121b相对于机体中心位置之间的相对位置关系。这可以在机体的重心的位置保持在机体中心位置时结束强风对策。
在电池121以这种方式移动到正常位置之后,处理进行至步骤S56。
当执行步骤S54或步骤S55的处理时,控制单元97在步骤S56中确定是否结束操作中的处理。例如,在步骤S56中,在无人驾驶飞行器11的飞行结束的情况下,确定处理结束。
在在步骤S56中确定处理尚未结束的情况下,处理返回至步骤S51并且重复上述处理。
另一方面,在在步骤S56中确定要结束处理的情况下,使无人驾驶飞行器11的每个单元所执行的处理停止,并且强风对策控制处理结束。
如上所述,无人驾驶飞行器11获取强风预测信息,根据强风预测信息改变机体的取向,移动电池121,并且因此增大惯性矩。通过这样做,即使在强风时也可以在不改变机体的总重量的情况下容易地抑制机体的倾斜。也就是说,可以容易地平衡机体。
<计算机的配置示例>
顺便提及,上述一系列处理可以由硬件执行或者可以由软件执行。在通过软件执行一系列处理的情况下,构成软件的程序被安装到计算机中。在此,计算机包括并入专用硬件等中的计算机。
图9是示出其中程序执行上述一系列处理的计算机的硬件的配置示例的框图。
在计算机中,中央处理单元(CPU)501、只读存储器(ROM)502和随机存取存储器(RAM)503通过总线504互连。
输入/输出接口505还连接至总线504。输入单元506、输出单元507、记录单元508、通信单元509和驱动器510连接至输入/输出接口505。
输入单元506包括开关、按钮、麦克风、成像元件等。输出单元507包括显示器、扬声器等。记录单元508包括硬盘和非易失性存储器。通信单元509包括网络接口等。驱动器510驱动可移动记录介质511,例如磁盘、光盘、磁光盘或半导体存储器。
在如上配置的计算机中,CPU 501经由输入/输出接口505和总线504将例如记录在记录单元508中的程序加载到RAM 503中并执行该程序,并且因此执行上述一系列处理。
例如,可以通过将计算机(CPU 501)执行的程序记录在作为封装介质的可移动记录介质511中来提供程序。另外,程序还可以经由诸如局域网、因特网或数字卫星广播的有线或无线传输介质来提供。
在计算机中,可以通过将可移动记录介质511安装到驱动器510中来经由输入/输出接口505将程序安装到记录单元508中。另外,程序可以由通信单元509经由有线或无线传输介质接收并安装到记录单元508中。另外,程序可以预先安装到ROM 502或记录单元508中。
应注意,计算机执行的程序可以是根据本说明书中描述的顺序按时间顺序执行处理的程序,或者可以是并行或在必要时刻例如在进行呼叫时执行处理的程序。
本技术的实施方式不限于上述实施方式,并且可以在不脱离本技术的范围的情况下进行各种修改。
例如,本技术可以采用云计算的配置,其中一个功能由多个设备经由网络共享并且被共同处理。
另外,以上流程图中描述的每个步骤可以由一个设备或由多个设备执行。
此外,在在一个步骤中包括多个处理的情况下,一个步骤中包括的多个处理可以由一个设备执行,或者可以由多个设备共享并执行。
此外,本技术可以具有以下配置。
(1)
一种无人驾驶飞行器,包括:
多个马达,所述多个马达使多个螺旋桨旋转;
可移动部,所述可移动部移动重心位置调节构件;以及
控制单元,所述控制单元控制所述重心位置调节构件通过所述可移动部的移动。
(2)
根据(1)所述的无人驾驶飞行器,其中,
所述可移动部在保持所述多个螺旋桨与所述无人驾驶飞行器的机体之间的位置关系的同时移动所述重心位置调节构件。
(3)
根据(1)或(2)所述的无人驾驶飞行器,其中,
所述控制单元基于马达中的预定一个马达的旋转速度与所述马达中的另一个马达的旋转速度之间的差来控制所述重心位置调节构件的移动,并且
在所述差不是预定范围内的值的情况下,所述可移动部移动所述重心位置调节构件。
(4)
根据(3)所述的无人驾驶飞行器,其中,
所述预定范围基于所述无人驾驶飞行器的重量的增加量来确定。
(5)
根据(1)至(4)中任一项所述的无人驾驶飞行器,还包括记录单元,所述记录单元记录指示所述重心位置调节构件在移动之后的位置的位置信息。
(6)
根据(5)所述的无人驾驶飞行器,其中,
在所述位置信息被记录在所述记录单元中的情况下,所述可移动部将所述重心位置调节构件移动到由所述位置信息指示的位置。
(7)
根据(5)所述的无人驾驶飞行器,还包括:
重量测量单元,所述重量测量单元测量所述无人驾驶飞行器的重量的增加量,其中,
所述记录单元彼此相关联地记录指示所述增加量的重量信息和与所述重量信息相对应的所述位置信息,并且
在与指示由所述重量测量单元测量的增加量的所述重量信息相关联的所述位置信息被记录在所述记录单元中的情况下,所述可移动部将所述重心位置调节构件移动到由所述位置信息指示的位置。
(8)
根据(1)至(7)中任一项所述的无人驾驶飞行器,其中,
所述重心位置调节构件是电池。
(9)
根据(1)至(7)中任一项所述的无人驾驶飞行器,其中,
所述重心位置调节构件是有效载荷。
(10)
根据(1)至(9)中任一项所述的无人驾驶飞行器,其中,
设置有多个所述重心位置调节构件。
(11)
根据(10)所述的无人驾驶飞行器,其中,
所述控制单元基于指示所产生的风的方向和风力的预测信息来调节所述无人驾驶飞行器的机体的取向,并且控制所述重心位置调节构件通过所述可移动部的移动,使得所述多个重心位置调节构件在彼此不同的多个方向上且远离所述机体的中心位置移动。
(12)
一种驱动方法,其中,
包括使多个螺旋桨旋转的多个马达和移动重心位置调节构件的可移动部的无人驾驶飞行器控制所述重心位置调节构件通过所述可移动部的移动。
(13)
一种程序,所述程序使控制包括使多个螺旋桨旋转的多个马达和移动重心位置调节构件的可移动部的无人驾驶飞行器的计算机执行包括以下步骤的处理:控制所述重心位置调节构件通过所述可移动部的移动。
(14)
一种无人驾驶飞行器,包括:
可移动部,所述可移动部移动多个调节构件,以及
控制单元,所述控制单元基于指示所产生的风的方向和风力的预测信息来调节机体的取向,并且所述控制单元控制所述调节构件通过所述可移动部的移动,使得所述多个调节构件在彼此不同的多个方向上且远离所述机体的中心位置移动。
(15)
根据(14)所述的无人驾驶飞行器,其中,
在由所述预测信息指示的风力等于或大于预定阈值的情况下,所述控制单元调节所述机体的取向并控制所述调节构件的移动。
(16)
根据(14)或(15)所述的无人驾驶飞行器,其中,
所述控制单元调节所述机体的取向,使得由所述预测信息指示的风的方向与所述调节构件的可移动方向变得彼此平行。
(17)
根据(14)至(16)中任一项所述的无人驾驶飞行器,还包括:
获取单元,所述获取单元获取所述预测信息。
(18)
根据(17)所述的无人驾驶飞行器,其中,
所述获取单元发送指示所述无人驾驶飞行器的位置的位置信息,并且接收与由所述位置信息指示的位置相对应的所述预测信息。
(19)
根据(14)至(16)中任一项所述的无人驾驶飞行器,还包括:
预测单元,所述预测单元基于所述无人驾驶飞行器存在的位置处的风观测结果的时间序列数据或所述无人驾驶飞行器的倾斜和加速度的时间序列数据中的至少任一时间序列数据来生成所述预测信息。
(20)
根据(14)至(19)中任一项所述的无人驾驶飞行器,其中,
所述控制单元根据所述机体的取向的调节来调节相机的取向。
(21)
根据(14)至(20)中任一项所述的无人驾驶飞行器,其中,
所述可移动部在不改变所述机体的重心的位置的情况下移动所述多个调节构件。
(22)
一种驱动方法,其中,
具有移动多个调节构件的可移动部的无人驾驶飞行器基于指示所产生的风的方向和风力的预测信息来调节机体的取向,并且控制所述调节构件通过所述可移动部的移动,使得所述多个调节构件在彼此不同的多个方向上且远离所述机体的中心位置移动。
(23)
一种程序,所述程序使控制具有移动多个调节构件的可移动部的无人驾驶飞行器的计算机执行包括以下步骤的处理:基于指示所产生的风的方向和风力的预测信息来调节机体的取向,并且控制调节构件通过所述可移动部的移动,使得所述多个调节构件在彼此不同的多个方向上且远离所述机体的中心位置移动。
附图标记列表
11 无人驾驶飞行器
21a,21b,21 螺旋桨
22a,22b,22 马达
24 电池
25 电池可移动部
94 重量测量单元
95 倾斜检测单元
96 记录单元
97 控制单元
151 强风信息获取单元
161 通信单元
162 传感器单元
163 预测单元
- 无人驾驶飞行器、驱动方法和程序
- 无人驾驶飞行器的追踪装置、追踪方法、追踪系统和程序