一种Galfenol合金驱动的双惯性冲击式精密步进微型直线电机
文献发布时间:2023-06-19 10:14:56
技术领域
本发明属于Galfenol合金应用设备技术领域,具体涉及一种Galfenol合金驱动的双惯性冲击式精密步进微型直线电机。
背景技术
利用惯性冲击量(力或力矩)获取运动形式的规律称为惯性冲击原理,实现这类运动形式的机构成为惯性驱动机构。
上世纪90年代初,日本学者T.HigUchi等人提出用惯性冲击原理实现精密电机的设计,拉开了惯性冲击式电机研究的序幕,进入21世纪以来惯性冲击式电机已经成为国内外的研究热点,它具有高精度、高效率、结构简单、位移分辨率高等优点,在电子产品(数码相机、移动电话等)、微精密定位(显微镜操作台)、微机器人等领域有广泛的应用。
现有的惯性冲击式电机一般都采用PZT(压电陶瓷)驱动,也就是利用压电陶瓷晶体逆压电效应,将电能转化为机械能。尽管压电驱动器有行程大,位移分辨率高等优点,由于它是脆性材料,非常难于加工,其次压电驱动器通常采用薄片型提高其性能,这种结构不能承受拉伸和弯曲力作用。PZT还存在高电压驱动、电极易击穿等问题,导致现有的压电式惯性冲击电机存在负载能力弱、可靠性差等问题。
基于上述原因这类电机应用受到很大限制,因此有必要寻找一种新的驱动方式来代替压电驱动以提高微型电机的整体性能,磁致伸缩材料能够在外部所处磁场大小发生变化时,发生相应的长度变化,Galfenol材料是一种新型的磁致伸缩功能材料,应变大,精度高,输出力大,响应快速,而且其机械性能优良,不易脆裂,是构造精密驱动器的理想材料。
发明内容
本发明的目的是:旨在提供一种Galfenol合金驱动的双惯性冲击式精密步进微型直线电机,以解决背景技术中所指出的现有惯性冲击式电机在实际运用中的不足。
为实现上述技术目的,本发明采用的技术方案如下:
一种Galfenol合金驱动的双惯性冲击式精密步进微型直线电机,包括壳体,所述壳体两端分别为输出端和输入端,所述壳体输入端对称安装有Galfenol合金棒,两个所述Galfenol合金棒缠绕有相串联的第一线圈,两个所述Galfenol合金棒共同固定连接有连接板,所述连接板左右两侧对称设有导向杆,两个所述导向杆之间设有驱动块,所述驱动块中部左右两侧均设有与导向杆圆周侧面相匹配的弧形凹槽,所述驱动块上下两侧设有向壳体输出端延伸的驱动杆,两个所述驱动杆均贯穿壳体输出端且与壳体滑动连接,所述驱动块上侧左右两端分别设有悬臂金属弹片,两个所述悬臂金属弹片面向壳体输入端一侧均设有Galfenol驱动片,两个所述悬臂金属弹片缠绕有相串联的第二线圈,所述第二线圈与第一线圈相串联,两个所述悬臂金属弹片均固定连接有加重块,所述壳体外侧设有第一电力输入端,所述第一电力输入端与第二线圈以及第一线圈电性串联连接形成通电回路。
进一步限定,所述导向杆为电磁导向杆,所述壳体外侧还设有第二电力输入端,所述第二电力输入端分别与两个导向杆电性连接,所述驱动块采用轻质非磁性材料制成,所述驱动块的两个弧形凹槽处包裹有铁皮。这样的结构,通过控制第二电力输入端的电流通断,能够使两个导向杆能够具有磁性和丧失磁性,当驱动块驱动至所需位置时,第二电力输入端输入电流,使两个导向杆具有磁性,将驱动块的铁皮磁性吸附,从而使驱动块可以稳定的固定于导向杆的任意位置,当再次需要调节位置时,第二电力输入端断开电流,使两个导向杆丧失磁性,从而使驱动块能够相对于两个导向杆移动位置。
进一步限定,所述铁皮与驱动块的两个弧形凹槽处之间采用热熔胶粘接固定。这样的结构,使铁皮与驱动块之间的连接稳固,加工方便。
进一步限定,所述Galfenol驱动片与悬臂金属弹片之间采用热熔胶粘接固定。这样的结构,使Galfenol驱动片与悬臂金属弹片之间的连接稳固,加工方便。
进一步限定,所述导向杆端部粘接有塑胶限位挡块。这样的结构,能够对驱动块的移动进行限位,防止驱动块滑脱导向杆。
进一步限定,所述壳体内部还对称设有导向滑轨,所述连接板对称设有与导向滑轨相匹配的导向滑块。这样的结构,在Galfenol合金棒在第一线圈通入电流后磁致伸长带动连接板移动时,使连接板移动更加稳定。
采用本发明技术方案,第一线圈和第二线圈之间串联,当第一电力输入端接通电源时,第一线圈和第二线圈中的电流是相同的,便于对电流大小进行控制;当第一电力输入端接通电源时,第一线圈通电产生沿着第一线圈轴向的磁场,会使壳体的Galfenol合金棒在磁场作用下,沿着磁场方向伸长,第二线圈通电产生沿着第二线圈轴向的磁场,会使面向壳体输入端一侧的Galfenol驱动片在磁场作用下,沿着磁场方向伸长,从而使悬臂金属弹片向输出端弯曲;
驱动块带动驱动杆伸出壳体时,具体的工作原理如下:
请先参考附图6,在第一电力输入端断开电源时,壳体内部各原件的初始状态如状态A所示,驱动块靠在连接板一侧,悬臂金属弹片处于平直状态;
当第一电力输入端接通电源,通入如图5所示的电流时,在时段0-1中,电流缓慢从0增大,Galfenol合金棒会在磁致伸缩的作用下慢慢向壳体输出端伸长,将导向杆带动同步伸长,同时Galfenol驱动片在磁致伸缩的作用下,沿着磁场方向伸长,从而使悬臂金属弹片带动加重块慢慢向输出端弯曲;由于整个过程中,第一电力输入端的输入电流是缓慢变大的,因此,驱动块的惯性冲击力较小,小于导向杆与弧形凹槽之间的摩擦力,从而驱动块在此过程中是与导向杆相对静止的,即驱动块与导向杆做整体向壳体输出端移动,如状态B所示,使驱动杆伸出壳体;在时段1-2中,电流迅速减小至0,此时,Galfenol合金棒带动连接板和导向杆迅速回缩,同时,Galfenol驱动片会迅速回缩,使悬臂金属弹片由弯曲状态迅速回弹,进而使加重块向输入端迅速摆动,从而使驱动块受到悬臂金属弹片向壳体输出端方向的惯性冲击力,因电流迅速减小,因此,驱动块受到的惯性冲击力会极大,大于导向杆与弧形凹槽之间的摩擦力,从而使驱动块继续向着壳体的输出端方向移动,如状态C所示,使驱动杆继续伸出壳体;此时一个步进周期结束,驱动杆在驱动块的驱动下伸出壳体,如此往复施加如图5所示的电流,即可使驱动杆不断地伸出壳体,达到所需要的伸出长度;
驱动块带动驱动杆收回壳体时,具体的工作原理如下:
请先参考附图8,在第一电力输入端断开电源时,壳体内部各原件的初始状态如状态D所示,驱动块远离连接板,悬臂金属弹片处于平直状态;
当第一电力输入端接通电源,通入如图7所示的电流时,在时段0’-1’中,电流迅速从0增大,Galfenol合金棒会在磁致伸缩的作用下快速向壳体输出端伸长,将导向杆带动同步伸长,同时Galfenol驱动片在磁致伸缩的作用下,沿着磁场方向伸长,从而使悬臂金属弹片带动加重块迅速向输出端弯曲;由于整个过程中,第一电力输入端的输入电流是迅速变大的,因此,驱动块受到向输入端一侧的惯性冲击力极大,大于导向杆与弧形凹槽之间的摩擦力,从而使驱动块相对于导向杆向着壳体输入端移动,如状态E所示,使驱动杆收回壳体中;在时段1’-2’中,电流缓慢减小至0,此时,Galfenol合金棒带动连接板和导向杆慢慢回缩,同时,Galfenol驱动片会缓慢回缩,使悬臂金属弹片由弯曲状态慢慢回弹,进而使加重块向输入端慢慢摆动,从而使驱动块受到向输入端一侧的惯性冲击力较小,小于导向杆与弧形凹槽之间的摩擦力,从而驱动块在此过程中是与导向杆相对静止的,即驱动块与导向杆做整体向壳体输入端移动,如状态F所示,从而使驱动杆继续收回壳体,此时一个步进周期结束,驱动杆在驱动块的驱动下收回壳体中,如此往复施加如图7所示的电流,即可使驱动杆不断地收回壳体,达到所需要的收回长度或者完全收回即可;
本发明相比现有技术具有以下优点:
1、采用Galfenol合金为驱动源,利用双惯性冲击原理来构造一种新型的精密步进微型直线电机。Galfenol合金的杨氏模量超过60Gpa,磁导率可达60-100,可以进行热轧和焊接等机械加工,能承受持久的拉力、弯矩、扭矩、冲击等外部载荷;
2、本发明的驱动源进行驱动时还具有如下优点:良好的机械性能,驱动器能加工成各种形状、也可以微型化;不需要预压力,结构简单,易于组装;低电压驱动,有时甚至只需要几伏电压;尺寸很小,动态涡流损耗低;低温效果好,且工作温度范围大。
附图说明
本发明可以通过附图给出的非限定性实施例进一步说明;
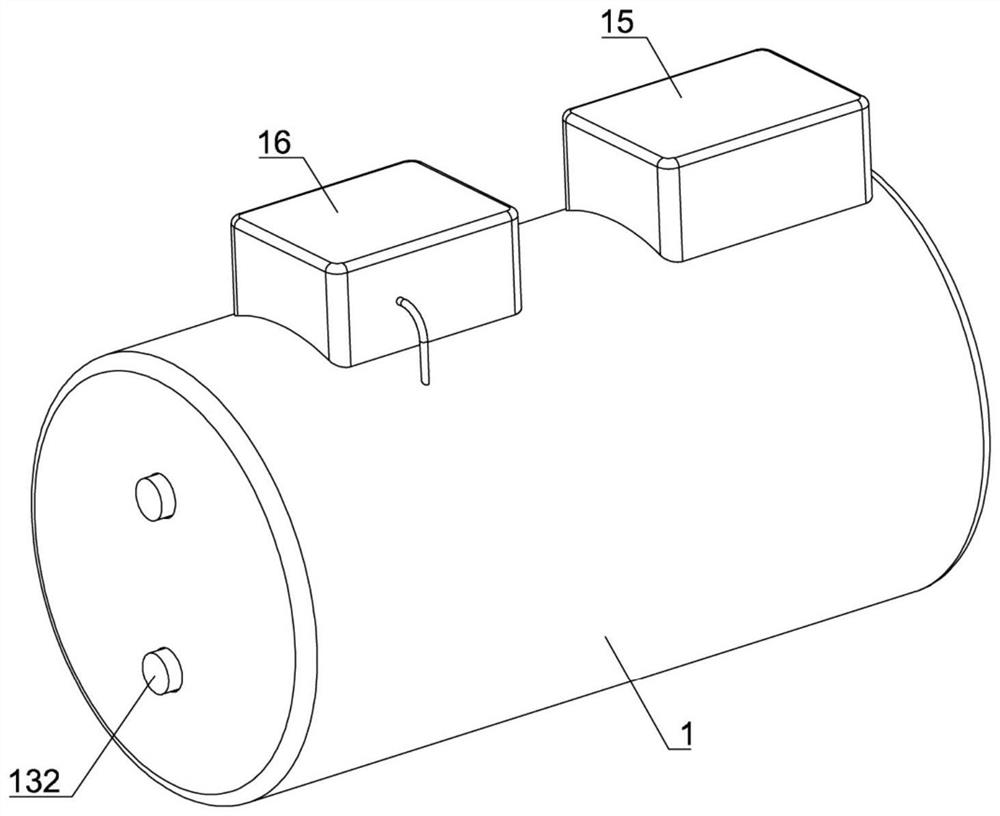
图1为本发明一种Galfenol合金驱动的双惯性冲击式精密步进微型直线电机实施例的结构示意图;
图2为本发明一种Galfenol合金驱动的双惯性冲击式精密步进微型直线电机实施例的内部结构示意图一;
图3为本发明一种Galfenol合金驱动的双惯性冲击式精密步进微型直线电机实施例的内部结构示意图二;
图4为本发明一种Galfenol合金驱动的双惯性冲击式精密步进微型直线电机实施例的驱动块结构示意图;
图5为本发明一种Galfenol合金驱动的双惯性冲击式精密步进微型直线电机实施例的输出电流示意图一;
图6为本发明一种Galfenol合金驱动的双惯性冲击式精密步进微型直线电机实施例的驱动杆伸出壳体状态示意图;
图7为本发明一种Galfenol合金驱动的双惯性冲击式精密步进微型直线电机实施例的输出电流示意图二;
图8为本发明一种Galfenol合金驱动的双惯性冲击式精密步进微型直线电机实施例的驱动杆收回壳体状态示意图;
主要元件符号说明如下:
壳体1、Galfenol合金棒11、第一线圈111、连接板12、导向杆121、塑胶限位挡块122、导向滑块123、驱动块13、弧形凹槽131、驱动杆132、铁皮133、悬臂金属弹片14、Galfenol驱动片141、第二线圈142、加重块143、第一电力输入端15、第二电力输入端16、导向滑轨17。
具体实施方式
为了使本领域的技术人员可以更好地理解本发明,下面结合附图和实施例对本发明技术方案进一步说明。
如图1-图4所示,本发明的一种Galfenol合金驱动的双惯性冲击式精密步进微型直线电机,包括壳体1,壳体1两端分别为输出端和输入端,壳体1输入端对称安装有Galfenol合金棒11,两个Galfenol合金棒11缠绕有相串联的第一线圈111,两个Galfenol合金棒11共同固定连接有连接板12,连接板12左右两侧对称设有导向杆121,两个导向杆121之间设有驱动块13,驱动块13中部左右两侧均设有与导向杆121圆周侧面相匹配的弧形凹槽131,驱动块13上下两侧设有向壳体1输出端延伸的驱动杆132,两个驱动杆132均贯穿壳体1输出端且与壳体1滑动连接,驱动块13上侧左右两端分别设有悬臂金属弹片14,两个悬臂金属弹片14面向壳体1输入端一侧均设有Galfenol驱动片141,两个悬臂金属弹片14缠绕有相串联的第二线圈142,第二线圈142与第一线圈111相串联,两个悬臂金属弹片14均固定连接有加重块143,壳体1外侧设有第一电力输入端15,第一电力输入端15与第二线圈142以及第一线圈111电性串联连接形成通电回路。
具体的,导向杆121为电磁导向杆,壳体1外侧还设有第二电力输入端16,第二电力输入端16分别与两个导向杆121电性连接,驱动块13采用轻质非磁性材料制成,驱动块13的两个弧形凹槽131处包裹有铁皮133。这样的结构,通过控制第二电力输入端16的电流通断,能够使两个导向杆121能够具有磁性和丧失磁性,当驱动块13驱动至所需位置时,第二电力输入端16输入电流,使两个导向杆121具有磁性,将驱动块13的铁皮133磁性吸附,从而使驱动块13可以稳定的固定于导向杆121的任意位置,当再次需要调节位置时,第二电力输入端16断开电流,使两个导向杆121丧失磁性,从而使驱动块13能够相对于两个导向杆121移动位置。实际上,也可根据情况考虑使用其他结构,能够使驱动块13可以稳定的固定于导向杆121的任意位置。
具体的,铁皮133与驱动块13的两个弧形凹槽131处之间采用热熔胶粘接固定。这样的结构,使铁皮133与驱动块13之间的连接稳固,加工方便。实际上,也可根据情况考虑使用其他结构,使铁皮133与驱动块13之间的连接稳固,加工方便。
具体的,Galfenol驱动片141与悬臂金属弹片14之间采用热熔胶粘接固定。这样的结构,使Galfenol驱动片141与悬臂金属弹片14之间的连接稳固,加工方便。实际上,也可根据情况考虑使用其他结构,使Galfenol驱动片141与悬臂金属弹片14之间的连接稳固,加工方便。
具体的,导向杆121端部粘接有塑胶限位挡块122。这样的结构,能够对驱动块13的移动进行限位,防止驱动块13滑脱导向杆121。实际上,也可根据情况考虑使用其他结构,能够对驱动块13的移动进行限位,防止驱动块13滑脱导向杆121。
具体的,壳体1内部还对称设有导向滑轨17,连接板12对称设有与导向滑轨17相匹配的导向滑块123。这样的结构,在Galfenol合金棒11在第一线圈111通入电流后磁致伸长带动连接板12移动时,使连接板12移动更加稳定。实际上,也可根据情况考虑使用其他结构,能够使连接板12移动更加稳定。
采用本发明技术方案,第一线圈111和第二线圈142之间串联,当第一电力输入端15接通电源时,第一线圈111和第二线圈142中的电流是相同的,便于对电流大小进行控制;当第一电力输入端15接通电源时,第一线圈111通电产生沿着第一线圈111轴向的磁场,会使壳体1的Galfenol合金棒11在磁场作用下,沿着磁场方向伸长,第二线圈142通电产生沿着第二线圈142轴向的磁场,会使面向壳体1输入端一侧的Galfenol驱动片141在磁场作用下,沿着磁场方向伸长,从而使悬臂金属弹片14向输出端弯曲;
驱动块13带动驱动杆132伸出壳体1时,具体的工作原理如下:
请先参考附图6,在第一电力输入端15断开电源时,壳体1内部各原件的初始状态如状态A所示,驱动块13靠在连接板12一侧,悬臂金属弹片14处于平直状态;
当第一电力输入端15接通电源,通入如图5所示的电流时,在时段0-1中,电流缓慢从0增大,Galfenol合金棒11会在磁致伸缩的作用下慢慢向壳体1输出端伸长,将导向杆121带动同步伸长,同时Galfenol驱动片141在磁致伸缩的作用下,沿着磁场方向伸长,从而使悬臂金属弹片14带动加重块143慢慢向输出端弯曲;由于整个过程中,第一电力输入端15的输入电流是缓慢变大的,因此,驱动块13的惯性冲击力较小,小于导向杆121与弧形凹槽131之间的摩擦力,从而驱动块13在此过程中是与导向杆121相对静止的,即驱动块13与导向杆121做整体向壳体1输出端移动,如状态B所示,使驱动杆132伸出壳体1;在时段1-2中,电流迅速减小至0,此时,Galfenol合金棒11带动连接板12和导向杆121迅速回缩,同时,Galfenol驱动片141会迅速回缩,使悬臂金属弹片14由弯曲状态迅速回弹,进而使加重块143向输入端迅速摆动,从而使驱动块13受到悬臂金属弹片14向壳体1输出端方向的惯性冲击力,因电流迅速减小,因此,驱动块13受到的惯性冲击力会极大,大于导向杆121与弧形凹槽131之间的摩擦力,从而使驱动块13继续向着壳体1的输出端方向移动,如状态C所示,使驱动杆132继续伸出壳体1;此时一个步进周期结束,驱动杆132在驱动块13的驱动下伸出壳体1,如此往复施加如图5所示的电流,即可使驱动杆132不断地伸出壳体1,达到所需要的伸出长度;
驱动块13带动驱动杆132收回壳体1时,具体的工作原理如下:
请先参考附图8,在第一电力输入端15断开电源时,壳体1内部各原件的初始状态如状态D所示,驱动块13远离连接板12,悬臂金属弹片14处于平直状态;
当第一电力输入端15接通电源,通入如图7所示的电流时,在时段0’-1’中,电流迅速从0增大,Galfenol合金棒11会在磁致伸缩的作用下快速向壳体1输出端伸长,将导向杆121带动同步伸长,同时Galfenol驱动片141在磁致伸缩的作用下,沿着磁场方向伸长,从而使悬臂金属弹片14带动加重块143迅速向输出端弯曲;由于整个过程中,第一电力输入端15的输入电流是迅速变大的,因此,驱动块13受到向输入端一侧的惯性冲击力极大,大于导向杆121与弧形凹槽131之间的摩擦力,从而使驱动块13相对于导向杆121向着壳体1输入端移动,如状态E所示,使驱动杆132收回壳体1中;在时段1’-2’中,电流缓慢减小至0,此时,Galfenol合金棒11带动连接板12和导向杆121慢慢回缩,同时,Galfenol驱动片141会缓慢回缩,使悬臂金属弹片14由弯曲状态慢慢回弹,进而使加重块143向输入端慢慢摆动,从而使驱动块13受到向输入端一侧的惯性冲击力较小,小于导向杆121与弧形凹槽131之间的摩擦力,从而驱动块13在此过程中是与导向杆121相对静止的,即驱动块13与导向杆121做整体向壳体1输入端移动,如状态F所示,从而使驱动杆132继续收回壳体1,此时一个步进周期结束,驱动杆132在驱动块13的驱动下收回壳体1中,如此往复施加如图7所示的电流,即可使驱动杆132不断地收回壳体1,达到所需要的收回长度或者完全收回即可;
上述实施例仅示例性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
- 一种Galfenol合金驱动的双惯性冲击式精密步进微型直线电机
- 一种Galfenol合金驱动的双惯性冲击式精密步进微型直线电机