一种双卡尔曼滤波耦合气液动力学模型估算SOC的方法及系统
文献发布时间:2023-06-19 10:16:30
技术领域
本发明属于电池管理系统领域,具体为一种双卡尔曼滤波耦合气液动力学模型估算SOC的方法及系统。
背景技术
自1886年第一辆汽车诞生以来,在一百多年时间里全球汽车保有量超过10亿辆,汽车已经成为人们出行和运输货物不可或缺的交通工具。一方面,传统汽车的动力源主要来源于石油,但石油属于不可再生能源,其总量正在日益减少,最终人类一定会面临石油紧缺甚至枯竭的问题。另一方面,汽车排放的尾气是空气污染物的重要来源之一。因此,近年来人类将目光转移到开发可再生能源和绿色能源技术上来,其中,大力发展电动汽车能够有效缓解石油快速消耗的压力和达到逐步改善空气质量的目标。
电动汽车销量逐年增长,但电动汽车起火事故也随之逐年攀升。导致电动汽车起火的主要原因分为两大类,其一,电池本身存在安全隐患;其二,电池管理系统没有起到切实有效的管理工作。大量科研工作者通过改变电池材料的性能、开发更安全体系的电池等手段提高电池使用安全性;有很多方法估算电池SOC,其中,电池解析模型与智能算法耦合的估算方法获得最广泛的研究与应用。电池解析模型主要有等效电路模型和电化学模型,电化学模型精度高,但非常复杂,主要应用于新电池体系的开发、电池失效机理分析等;等效电路模型结构简单、计算量小,被广泛应用于电池SOC在线估算,但模型精度不高,随着RC拓扑结构增加模型的复杂度将显著增加,精度改善不明显。
发明内容
针对上述技术难题,本发明提供一种双卡尔曼滤波耦合气液动力学模型估算SOC的方法及系统。本发明实现了离线参数气液动力学电池模型、双卡尔曼滤波算法和电流积分法之间的耦合,首先利用离线模型快速消除初始误差的能力,然后利用双卡尔曼滤波算法快速寻优能力实现辨识在线模型参数并修正估算结果,最后利用电流积分法计算量小和增量SOC估算精度高特点,实现对电池整个放电过程中SOC高精度估算。
本发明的技术方案是:一种双卡尔曼滤波耦合气液动力学模型估算SOC的方法,包括如下步骤:
步骤一:定义初始量,第一个卡尔曼滤波估计协方差矩阵P、第二个卡尔曼滤波估计协方差矩阵PP,参数向量Para,所述参数向量Para=[y
步骤二:读取第k组电池数据,k=1,2,3…,所述电池数据包括端电压、电流、温度、内阻中的一个或多个的组合;
步骤三:将第k组数据和初始开路电压f(SOC
步骤四:将第k组数据、初始开路电压f(SOC
步骤五:对所述在线端电压模型的四个参数[y
步骤六:根据矩阵、传感器方程R和H矩阵计算卡尔曼增益K;
步骤七:更新P矩阵和参数向量Para;
步骤八:将第k组数据、初始开路电压f(SOC
步骤九:根据第k组电流和初始SOC
步骤十:对所述在线OCV模型的初始开路电压f(SOC
步骤十一:根据矩阵F、h、q、RR计算估计协方差矩阵PP和卡尔曼增益G;
步骤十二:更新协方差矩阵PP和S_OCV;
步骤十三:对Ah_OCV和更新后的S_OCV加权获得最终OCV;
步骤十四:将最终OCV查OCV-SOC关系获得SOC值,并赋值SOC
转步骤二,如此循环往复,并在每次循环时对k累加1,完成对电池SOC实时估算。
上述方案中,所述步骤一定义初始量中P矩阵定义为4×4单位矩阵,定义PP=1,参数向量Para初始定义为零向量;根据工程经验定义R,RR,q∈(0,0.1),计数k=1,SOC
上述方案中,所述步骤二中电池数据为端电压U
上述方案中,所述步骤三离线OCV模型通过估算方程(1)和(2)估算开路电压E_OCV:
P
其中,U
在k=1,2,3…,时,根据U
上述方案中,所述步骤四在线端电压模型通过估算方程(3)估算端电压E_U
所述步骤五中
所述步骤六中K=P×H’×(H×P×H’+R)
所述步骤七更新P矩阵和参数向量Para,其中P=(E(4)-K×H)×P,Para=Para+K×(U
上述方案中,所述步骤八在线OCV模型通过估算方程(4)和(5)估算开路电压S_OCV:
P
上述方案中,所述步骤九电流积分法计算开路电压Ah_OCV,如方程(6)所示:
上述方案中,所述步骤十对在线OCV模型的初始开路电压f(SOC
对SOC-OCV关系求导得到雅可比矩阵h=[f'(SOC)]。
上述方案中,所述步骤十一中PP=F×PP×F’+q,G=P×h’×(h×PP×h’+RR)
所述步骤十二中PP=(1-g×H)×PP,S_OCV=S_OCV+G×(Ah_OCV-S_OCV);
所述步骤十三中OCV=L×S_OCV+(1-L)×Ah_OCV,其中L∈[0,1]。
一种实现所述双卡尔曼滤波耦合气液动力学模型估算SOC的方法的系统,包括信号采集模块、SOC估算模块和显示模块;
所述信号采集模块包括电流传感器、温度传感器和电压传感器,用于采集电池的电流、温度和端电压,其与SOC估算模块连接,并将采集的电流、温度和端电压信号传送到SOC估算模块;所述SOC估算模块包括单片机,定义初始量估计协方差矩阵P、PP,参数向量Para,传感器方差R、RR,过程噪声q,额定容量Q
与现有技术相比,本发明的有益效果是:
本发明实现了离线参数气液动力学电池模型、双卡尔曼滤波算法和电流积分法之间的耦合,首先利用离线模型快速消除初始误差的能力,然后利用双卡尔曼滤波算法快速寻优能力实现辨识在线模型参数并修正估算结果,最后利用电流积分法计算量小和增量SOC估算精度高特点,实现对电池整个放电过程中SOC高精度估算。本发明在估算SOC之前无需测试大量实验数据,可以大大节约测试成本。本发明在多种工况下快速消除初始误差之后SOC估算精度达到1.5%以内,正在实现高精度估算电池SOC值。本发明采用气液动力学模型与双卡尔曼滤波耦合的方法能够显著提高电池SOC估算精度。本发明通过提高电池SOC估算精度的方法提升电池管理系统对电池的管理能力,实现降低电动汽车百公里电耗、延长电池使用寿命、降低电动汽车综合使用成本、提高电动汽车使用安全性的目标。
附图说明
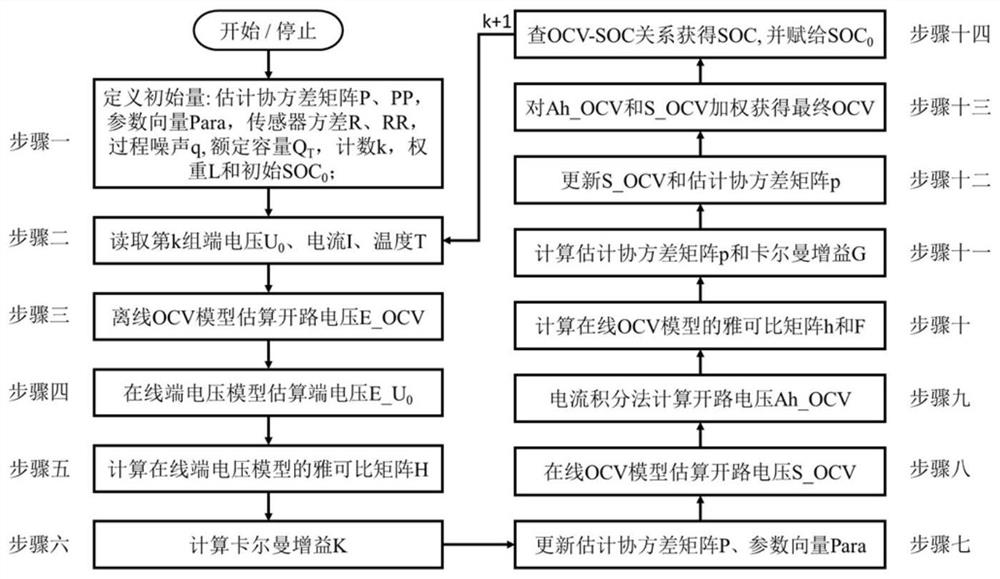
图1:是本发明一实施方式的实施流程图;
图2:是本发明一实施方式的辨识模型离线参数流程图;
图3:是本发明一实施方式的SOC-f’(SOC)关系图;
图4:是本发明一实施方式的SOC-OCV关系图;
图5:是本发明一实施方式的CC工况估算结果;
图6:是本发明一实施方式的DST工况估算结果;
图7:是本发明一实施方式的FUDS工况估算结果;
图8:是本发明一实施方式的UDDS工况估算结果;
图9:是本发明一实施方式的合成工况估算效果。
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
图1所示为本发明所述双卡尔曼滤波耦合气液动力学模型估算SOC方法的一种较佳实施方式,所述双卡尔曼滤波耦合气液动力学模型估算SOC的方法,包括如下步骤:
步骤一:定义初始量,第一个卡尔曼滤波估计协方差矩阵P、第二个卡尔曼滤波估计协方差矩阵PP,参数向量Para,第一个卡尔曼滤波传感器方差R、第二个卡尔曼滤波传感器方差RR,过程噪声q,额定容量Q
步骤二:读取第k组电池数据,k=1,2,3…,所述电池数据包括端电压、电流、温度、内阻中的一个或多个的组合;
步骤三:将第k组数据和初始开路电压f(SOC
步骤四:将第k组数据、初始开路电压f(SOC
步骤五:对所述在线端电压模型的四个参数[y
步骤六:根据矩阵、传感器方程R和H矩阵计算卡尔曼增益K;
步骤七:更新P矩阵和参数向量Para;
步骤八:将第k组数据、初始开路电压f(SOC
步骤九:根据第k组电流和初始SOC
步骤十:对所述在线OCV模型的初始开路电压f(SOC
步骤十一:根据矩阵F、h、q、RR计算估计协方差矩阵PP和卡尔曼增益G;
步骤十二:更新协方差矩阵PP和S_OCV;
步骤十三:对Ah_OCV和更新后的S_OCV加权获得最终OCV;
步骤十四:将最终OCV查OCV-SOC关系获得SOC值,并赋值SOC
转步骤二,如此循环往复,并在每次循环时对k累加1,完成对电池SOC实时估算。
优选的,所述步骤一定义初始量中P矩阵定义为4×4单位矩阵,定义PP=1,参数向量Para初始定义为零向量;根据工程经验定义R,RR,q∈(0,0.1),工程上一般取值R=0.003、RR=0.003、q=0.002,所述额定容量Q
优选的,所述步骤二中电池数据为端电压U
所述步骤三离线OCV模型通过估算方程(1)和(2)估算开路电压E_OCV:
P
其中,U
在k=1,2,3…时,根据U
所述步骤四在线端电压模型通过估算方程(3)估算端电压E_U
所述步骤五中
所述步骤六中K=P×H’×(H×P×H’+R)
所述步骤七更新P矩阵和参数向量Para,其中P=(E(4)-K×H)×P,Para=Para+K×(U
所述步骤八在线OCV模型通过估算方程(4)和(5)估算开路电压S_OCV:
P
所述步骤九电流积分法计算开路电压Ah_OCV,如方程(6)所示:
所述步骤十对在线OCV模型的初始开路电压f(SOC
所述步骤十一中PP=F×PP×F’+q,G=P×h’×(h×PP×h’+RR)
所述步骤十二中PP=(1-g×H)×p,S_OCV=S_OCV+G×(Ah_OCV-S_OCV);
所述步骤十三中OCV=L×S_OCV+(1-L)×Ah_OCV,其中L∈[0,1],优选的,L=0.9×L+0.01;
具体实施例:
对锂离子电池进行HPPC实验,记录电池端电压、温度、电流和对应的开路电压数据,用于确定一组模型的离线参数。其中,模型的离线参数确定方法如图2所示,得到一组离线参数为[k
所述双卡尔曼滤波耦合气液动力学模型估算SOC的方法,包括以下步骤:
步骤一:定义初始量,其中初始量P=E(4)和PP=1,参数向量为零向量Para=[0,0,0,0],传感器方差为较小的正数,工程上一般取值R=0.003、RR=0.003,过程噪声为较小的正数,工程上一般取值q=0.002,Q
步骤二:读取第k组电池数据,所述电池数据为端电压、电流和温度;
步骤三、离线OCV模型估算开路电压E_OCV=4.105,其中估算方程如方程(1)和(2)所示,由表1所示,在k=1时,U
P
其中,其中,U
表1采样估算结果
步骤四:在线端电压模型估算端电压E_U
计算得E_U
步骤五:计算在线端电压模型的H矩阵,
步骤六:计算卡尔曼增益K,K=P×H’×(H×P×H’+R)
步骤七:更新P矩阵和参数向量Para,其中P=(E(4)-K×H)×P,Para=Para+K×(U
步骤八:在线OCV模型估算开路电压S_OCV=4.1055,其中估算方程如方程(4)和(5)所示;
P
步骤九:电流积分法计算开路电压Ah_OCV=3.7159,如方程(6)所示:
步骤十:对在线OCV模型的初始开路电压f(SOC
步骤十一:计算估计协方差矩阵PP和卡尔曼增益G,PP=F×PP×F’+q,G=P×h’×(h×PP×h’+RR)
步骤十二:更新协方差矩阵PP和S_OCV=4.1009,PP=(1-g×H)×PP,S_OCV=S_OCV+G×(Ah_OCV-S_OCV);
步骤十三:对Ah_OCV和更新后的S_OCV加权获得最终OCV=4.0635,OCV=L×S_OCV+(1-L)×Ah_OCV,其中L∈[0,1],优选的,L=0.9×L+0.01;
步骤十四:将最终OCV查OCV-SOC关系获得SOC=89.37,并赋值SOC
转步骤二,如此循环往复,完成对电池SOC实时估算;其中,k为1-8步估算结果如表1所示。
图5显示本发明在CC工况下估算结果,实线(实验值)与点线(估算值)具有非常好的重合性,表明本发明取得了非常高的估算精度;因为估算开始时随机赋予初始SOC
图6显示本发明在DST工况下估算结果,实线(实验值)与点线(估算值)同样具有非常好的重合性,表明本发明在DST工况下依然取得非常高的估算精度;因为估算开始时随机赋予初始SOC
图7显示本发明在FUDS工况下估算结果,实线(实验值)与点线(估算值)展现非常好的重合性,表明本发明在FUDS工况下实现高精度SOC估算;同样,在估算开始时随机赋予初始SOC
图8显示本发明在UDDS工况下估算结果,UDDS中包含大量充电过程,因此完成整个放电过程时间较长,实线(实验值)与点线(估算值)几乎是重合的,表明本发明在UDDS工况下实现高精度SOC估算;同样,在估算开始时随机赋予初始SOC
图9显示本发明在合成工况下估算结果,合成工况与实际行驶条件更为符合,在一次放电过程中电动汽车可能行驶在不同场景,如高速路段、郊区和城市路段等;同样,实线(实验值)与点线(估算值)表现出非常好的重合性,表明本发明在合成工况下也可以实现高精度SOC估算;在估算开始时随机赋予初始SOC
一种实现所述双卡尔曼滤波耦合气液动力学模型估算SOC的方法及系统,包括信号采集模块、SOC估算模块和显示模块;
所述信号采集模块包括电流传感器、温度传感器和电压传感器,用于采集电池的电流、温度和端电压,其与SOC估算模块连接,并将采集的电流、温度和端电压信号传送到SOC估算模块;
所述SOC估算模块包括单片机,定义初始量估计协方差矩阵P、PP,参数向量Para,传感器方差R、RR,过程噪声q,额定容量Q
所述SOC估算模块与显示模块连接,将电池数据和SOC值发送给显示模块显示。
根据本实施例优选的,所述信号采集模块包括电流传感器、温度传感器和电压传感器。
所述SOC估算模块包括单片机,所述单片机优选为飞思卡尔汽车级单片机。将基于气液动力学模型的SOC在线估算方法在硬件上实现,可以在Keil uVision5开发平台上运用C语言编写的代码在单片机上实现。
所述SOC估算模块具体为:
首先加载单片机的库函数文件,运用库函数配置单片机寄存器,编写时钟函数、定时器函数、延迟函数、存储函数、数据校验函数、开路电压估算函数和主函数等;
①将电流传感器、温度传感器连接到信号采集卡上,采集卡可以直接采集单体电池电压,优选的,单体电池电压范围在0—5V以内;
②采集卡与单片机串口相连,通讯方式选择RS-232,将电池的电流、电压、温度信号传给单片机;
③单片机主函数读取电池的电流、电压、温度信号,调用OCV估算函数算出当前输入下的开路电压值,再通过OCV-SOC关系获得SOC值;将电池电流、端电压、温度和算出的SOC值写入内存卡中,并把电池电流、端电压、温度和算出的SOC值发送给上位机的显示模块显示;
④如此循环第①至③步,完成电池组实时SOC估算。
所述上位机是基于Microsoft Visual Studio平台开发的,用于显示电池组端电压、SOC、所有串联单体电池的SOC和拟合的电池最低SOC;
所述单片机包括:2
运用的信号通讯协议包括:RS-485、CAN、TCP、modbus、MPI、串口通信等。
应当理解,虽然本说明书是按照各个实施例描述的,但并非每个实施例仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
上文所列出的一系列的详细说明仅仅是针对本发明的可行性实施例的具体说明,它们并非用以限制本发明的保护范围,凡未脱离本发明技艺精神所作的等效实施例或变更均应包含在本发明的保护范围之内。
- 一种双卡尔曼滤波耦合气液动力学模型估算SOC的方法及系统
- 一种双卡尔曼滤波耦合气液动力学模型估算SOC的方法及系统