手术机器人具有的机械臂连接装置
文献发布时间:2023-06-19 10:18:07
技术领域
本发明属于手术用机械臂连接座技术领域,更具体地说,特别涉及一种手术机器人具有的机械臂连接装置。
背景技术
手术机器人已经用于世界各地的许多手术室中。这些机器人不是真正的自动化机器人,它们不能自已进行手术,但是它们向手术提供了有用的机械化帮助。这些机器仍然需要外科医生来操作它们并对其输入指令。这些手术机器人的控制方法是远程控制和语音启动,之所以将机器人引入医疗,是因为在微创手术中,它们可以实现对外科仪器前所未有的精准控制。目前为止,这些机器已经用来定位内窥镜、进行胆囊手术以及胃灼热和胃食管反流的矫治。机器人手术领域的最终目标是设计一种机器人,可以用来进行不开胸口的心脏手术,外科医生站在控制台边,离手术台几十厘米远,透过探视镜向里看,达芬奇手术机器人来研究病人体内的照相机发送的3D图像。图像显示的是手术点以及两个固定在上述两根杆端点上的手术仪器。像操纵杆一样的控制手柄,位于屏幕的正下方,外科医生用来操作手术仪器。每次操纵杆移动时,计算机就向仪器发送电子信号,仪器就和外科医生的手同步移动。
例如申请号:CN201910424362.6本发明公开了一种手术机器人的启动方法,包括手柄及操作臂,所述操作臂具有末端器械,所述末端器械用于执行手术操作,并跟随所述手柄运动,所述对齐方法包括:获取所述末端器械的第一姿态信息;获取所述手柄的第二姿态信息;基于所述第一姿态信息与所述第二姿态信息之间的偏差获取自动调整信息,以补偿所述偏差。
基于上述专利的检索,以及结合现有技术中的结构发现,类似于上述专利中手术机械臂在对患者的手臂、腿部进行手术时,由于手臂或腿部的手术操作面弧度过大,有时在进行伤口缝合时,手术机械臂的底座固定,不能随手术区域的变化而移动,导致设备操控不便,影响手术效果,手臂的固定机构过硬不利于手臂的血液流通,容易引起患者不适。
发明内容
为了解决上述技术问题,本发明提供一种手术机器人具有的机械臂连接装置,以解决类似于上述专利中手术机械臂在对患者的手臂、腿部进行手术时,由于手臂或腿部的手术操作面弧度过大,有时在进行伤口缝合时,手术机械臂的底座固定,不能随手术区域的变化而移动,导致设备操控不便,影响手术效果,手臂的固定机构过硬不利于手臂的血液流通,容易引起患者不适的问题。
本发明一种手术机器人具有的机械臂连接装置的目的与功效,由以下具体技术手段所达成:
一种手术机器人具有的机械臂连接装置,包括底座,支柱,定位板,支撑条,机械臂座,充气气囊,手术机械臂,支撑板,按摩轮,驱动件二,同步驱动机构,转动蜗杆;所述底座的上表面上通过胶合连接辅助定位层;所述支柱的底端通过焊接固定连接在底座的左端面上;所述定位板的底端通过焊接固定连接在底座的左侧面连接块上,且定位板右端通过螺栓固定连接在支柱的右端;所述支撑条分两处固定连接在底座的左侧面连接块上,且支撑条的右端通过螺栓固定连接在支柱的右端;所述机械臂座活动连接在支撑条的外侧,且机械臂座位于定位板的内侧;所述充气气囊固定连接在定位层的两侧夹臂层内;所述手术机械臂安装在机械臂座的内侧面;所述支撑板固定连接在底座的中间;所述同步驱动机构通过轴承转动连接在支撑板上;所述按摩轮通过焊接固定连接在同步驱动机构的轴上端;所述驱动件二通过螺栓固定连接在支撑板的下表面上,且驱动件二的输出轴通过锥齿轮啮合连接同步驱动机构的中间轴下端;所述转动蜗杆通过轴承转动连接在机械臂座的上表面上。
进一步的,所述辅助定位层包括有承载层和夹臂层,所述辅助定位层为软质塑料材质制成,承载层的左右两侧分别固定连接一处夹臂层,夹臂层设为筒体结构。
进一步的,所述支柱的末端固定连接紧固端,紧固端为拱形的折弯板,且紧固端的上下两板上分别开设有两处螺栓孔。
进一步的,所述定位板为弧形结构,且定位板的内弧面上设有内齿块,定位板的右端固定连接一处定位头,定位头上开设有两处圆孔。
进一步的,所述支撑条为弧形结构的板,且支撑条的内弧面上固定连接有LED灯,支撑条的右端上方设有一处挡块。
进一步的,所述机械臂座的侧面转动连接有四处滚筒,且机械臂座的上表面上通过轴承转动连接有一处定位齿轮,定位齿轮的轴固定连接有一处定位蜗轮,定位蜗轮的下方啮合连接转动蜗杆,机械臂座的上表面固定连接有一处驱动件一,驱动件一的输出轴固定连接转动蜗杆。
进一步的,所述按摩轮的上表面上固定连接有三处凸块。
进一步的,所述同步驱动机构包括有从动锥齿轮、主动带轮和从动带轮,从动锥齿轮的轴上固定连接有两处主动带轮,且主动带轮的两侧分别通过传动带连接有一处主动带轮。
与现有技术相比,本发明具有如下有益效果:
通过本结构的辅助定位层和充气气囊的配合,辅助定位层内有充气气囊,当对手臂进行手术操作前,需将患者手臂放置在承载层上,充气气囊位于夹臂层的内部,当对充气气囊进行充气时,充气气囊膨胀将夹臂层鼓起,两侧的充气气囊同时对中间手臂夹紧,使用气囊可以避免夹持设备过硬,使患者感觉不适的情况。
通过本结构的机械臂座、定位板和支撑条的配合,驱动件一动作时,带动转动蜗杆转动,转动蜗杆与定位蜗轮啮合,形成蜗轮蜗杆传动,带动定位齿轮转动,定位齿轮与内齿块配合,形成齿轮齿条传动,带动机械臂座在定位板上进行运动,机械臂座设在定位板和支撑条的中间,支撑条的内弧面上固定连接有LED灯,LED灯可在手术过程中提供足够的光照条件,定位板的内齿块可与机械臂座的定位齿轮配合,形成齿轮齿条传动,调节机械臂座在支撑条上的位置,方便切换手术机械臂的位置,从多个方向对患者手臂进行手术,支柱的末端设有紧固端,紧固端与定位板和支撑条的末端均使用螺栓连接,可增强定位板和支撑条的载重能力,减轻机械臂使用时的晃动。
通过本结构的按摩轮和同步驱动机构的配合,通过驱动机构和驱动件二的作用,各级轴之间采用带传动带动,驱动上方的三处按摩轮同时转动,可隔着软质的承载层对患者手臂的底部进行适度按摩,减轻患者手臂在夹持状态下不舒服的感觉,适度按摩减轻麻木感,可以看出,在现有的手术机器人的机械臂连接座上将进行了改进,将机械臂连接座通过自动化调节,实现机械臂连接座变换方向对患者手臂进行手术,同时提高了患者的舒适度和医护人员的操作便捷性。
附图说明
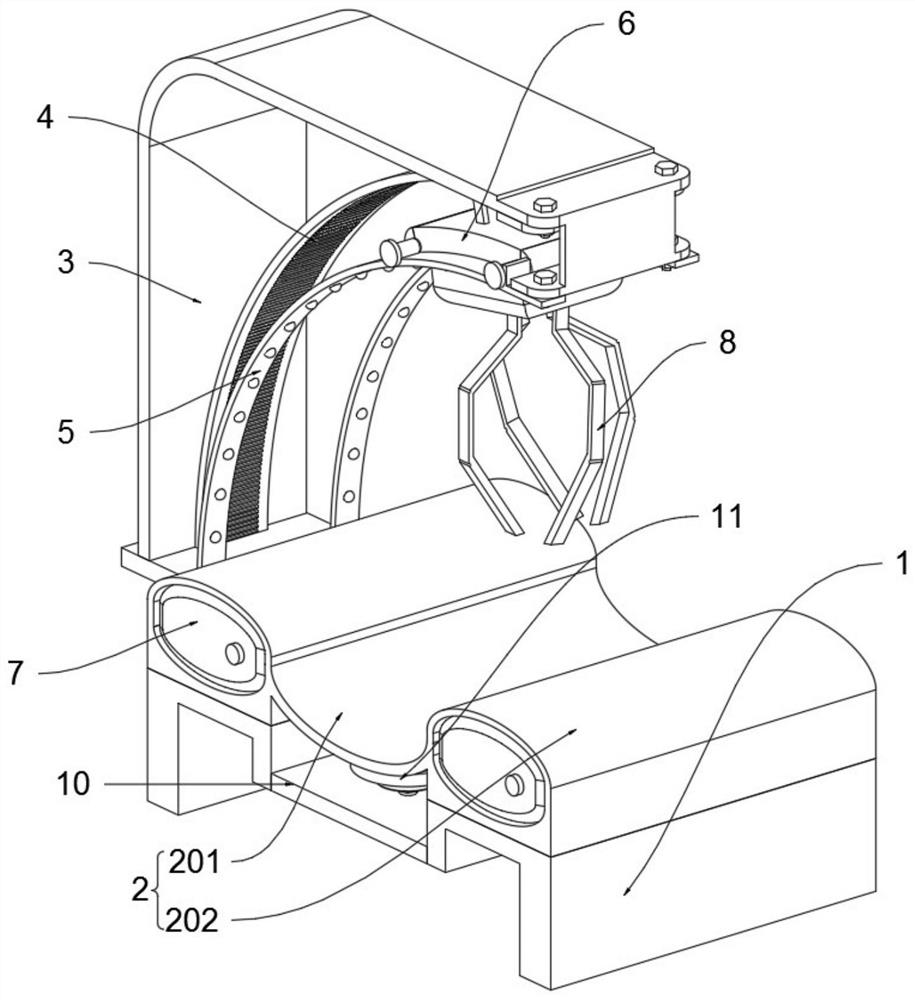
图1是本发明的结构示意图。
图2是本发明手臂夹紧时结构示意图。
图3是本发明底部结构示意图。
图4是本发明同步驱动机构结构示意图。
图5是本发明支柱结构示意图。
图6是本发明机械臂座结构示意图。
图7是本发明图5的A处局部放大图。
图8是本发明图3的B处局部放大图。
图中,部件名称与附图编号的对应关系为:
1、底座;2、辅助定位层;201、承载层;202、夹臂层;3、支柱;301、紧固端;4、定位板;401、定位头;402、内齿块;5、支撑条;501、LED灯;502、挡块;6、机械臂座;601、滚筒;602、定位齿轮;6021、定位蜗轮;603、驱动件一;7、充气气囊;8、手术机械臂;10、支撑板;11、按摩轮;1101、凸块;12、驱动件二;13、同步驱动机构;1301、从动锥齿轮;1302、主动带轮;1303、从动带轮;14、转动蜗杆。
具体实施方式
下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
实施例:
如附图1至附图8所示:
本发明提供一种手术机器人具有的机械臂连接装置,包括底座1,支柱3,定位板4,支撑条5,机械臂座6,充气气囊7,手术机械臂8,支撑板10,按摩轮11,驱动件二12,同步驱动机构13,转动蜗杆14;底座1的上表面上通过胶合连接辅助定位层2;支柱3的底端通过焊接固定连接在底座1的左端面上;定位板4的底端通过焊接固定连接在底座1的左侧面连接块上,且定位板4右端通过螺栓固定连接在支柱3的右端;支撑条5分两处固定连接在底座1的左侧面连接块上,且支撑条5的右端通过螺栓固定连接在支柱3的右端;机械臂座6活动连接在支撑条5的外侧,且机械臂座6位于定位板4的内侧;充气气囊7固定连接在辅助定位层2的两侧夹臂层202内;手术机械臂8安装在机械臂座6的内侧面;支撑板10固定连接在底座1的中间;同步驱动机构13通过轴承转动连接在支撑板10上;按摩轮11通过焊接固定连接在同步驱动机构13的轴上端;驱动件二12通过螺栓固定连接在支撑板10的下表面上,且驱动件二12的输出轴通过锥齿轮啮合连接同步驱动机构13的中间轴下端;转动蜗杆14通过轴承转动连接在机械臂座6的上表面上。
其中,辅助定位层2包括有承载层201和夹臂层202,辅助定位层2为软质塑料材质制成,承载层201的左右两侧分别固定连接一处夹臂层202,夹臂层202设为筒体结构,此结构的辅助定位层2如图1所示,辅助定位层2内有充气气囊7,当对手臂进行手术操作前,需将患者手臂放置在承载层201上,充气气囊7位于夹臂层202的内部,当对充气气囊7进行充气时,充气气囊7膨胀将夹臂层202鼓起,两侧的充气气囊7同时对中间手臂夹紧,使用气囊可以避免夹持设备过硬,使患者感觉不适的情况。
其中,支柱3的末端固定连接紧固端301,紧固端301为拱形的折弯板,且紧固端301的上下两板上分别开设有两处螺栓孔,此结构的支柱3如图5所示,此结构的支柱3如图5所示,支柱3的末端设有紧固端301,紧固端301与定位板4和支撑条5的末端均使用螺栓连接,可增强定位板4和支撑条5的载重能力,减轻机械臂使用时出现晃动。
其中,定位板4为弧形结构,且定位板4的内弧面上设有内齿块402,定位板4的右端固定连接一处定位头401,定位头401上开设有两处圆孔,此结构的定位板4如图5所示,支撑条5为弧形结构的板,且支撑条5的内弧面上固定连接有LED灯501,支撑条5的右端上方设有一处挡块502,此结构的支撑条5如图5所示,机械臂座6设在定位板4和支撑条5的中间,支撑条5的内弧面上固定连接有LED灯501,LED灯501可在手术过程中提供足够的光照条件,定位板4的内齿块402可与机械臂座6的定位齿轮602配合,形成齿轮齿条传动,调节机械臂座6在支撑条5上的位置,方便切换手术机械臂8的位置,从多个方向对患者手臂进行手术。
其中,机械臂座6的侧面转动连接有四处滚筒601,且机械臂座6的上表面上通过轴承转动连接有一处定位齿轮602,定位齿轮602的轴固定连接有一处定位蜗轮6021,定位蜗轮6021的下方啮合连接转动蜗杆14,机械臂座6的上表面固定连接有一处驱动件一603,驱动件一603的输出轴固定连接转动蜗杆14,此结构的机械臂座6如图6所示,驱动件一603动作时,带动转动蜗杆14转动,转动蜗杆14与定位蜗轮6021啮合,形成蜗轮蜗杆传动,带动定位齿轮602转动,定位齿轮602与内齿块402配合,形成齿轮齿条传动。
其中,同步驱动机构13包括有从动锥齿轮1301、主动带轮1302和从动带轮1303,从动锥齿轮1301的轴上固定连接有两处主动带轮1302,且主动带轮1302的两侧分别通过传动带连接有一处主动带轮1302,此结构的同步驱动机构13如图4所示,按摩轮11的上表面上固定连接有三处凸块1101,此结构的按摩轮11如图4所示,通过同步驱动机构13和驱动件二12的作用,各级轴之间采用带传动带动,驱动上方的三处按摩轮11同时转动,可隔着软质的承载层201对患者手臂的底部进行适度按摩,减轻患者手臂在夹持状态下不舒服的感觉,适度按摩减轻麻木感。
使用时:首先,将患者的手臂手术位置朝上放置在辅助定位层2的中间承载层201上,再对充气气囊7进行充气,充气气囊7膨胀将夹臂层202鼓起,两侧的充气气囊7同时对中间手臂夹紧,使用气囊可以避免夹持设备过硬,使患者感觉不适的情况,进行手术时,若手术时间过长,通过同步驱动机构13和驱动件二12的作用,各级轴之间采用带传动带动,驱动上方的三处按摩轮11同时转动,可隔着软质的承载层201对患者手臂的底部进行适度按摩,减轻患者手臂在夹持状态下不舒服的感觉,适度按摩减轻麻木感,当手术横向位置跨度较大时,控制驱动件一603动作,带动转动蜗杆14转动,转动蜗杆14与定位蜗轮6021啮合,形成蜗轮蜗杆传动,带动定位齿轮602转动,定位齿轮602与内齿块402配合,形成齿轮齿条传动,带动机械臂座6在定位板4上进行运动,机械臂座6设在定位板4和支撑条5的中间,支撑条5的内弧面上固定连接有LED灯501,LED灯501可在手术过程中提供足够的光照条件,定位板4的内齿块402可与机械臂座6的定位齿轮602配合,形成齿轮齿条传动,调节机械臂座6在支撑条5上的位置,方便切换手术机械臂8的位置,从多个方向对患者手臂进行手术,可以看出,在现有的手术机器人的机械臂连接座上将进行了改进,将机械臂连接座通过自动化调节,实现机械臂连接座变换方向对患者手臂进行手术,同时提高了患者的舒适度和医护人员的操作便捷性。
本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
- 手术机器人具有的机械臂连接装置
- 手术机器人机械臂连接装置及其手术机器人