实现汽车尾灯动态效果的电子控制模块
文献发布时间:2023-06-19 10:21:15
技术领域
本发明涉及汽车照明领域,尤其涉及一种实现汽车尾灯动态效果的电子控制模块。
背景技术
传统汽车车灯使用灯泡,完成基本的照明及示意功能,随着电子技术的发展,车灯越来越好看,越来越智能化,比如在尾灯的转向灯加入流水功能;加强人机交互体验,在车主靠近汽车时,汽车主动“感知”车主的到来,汽车灯光打开迎宾动态效果,给车主以尊贵感;以及利用汽车灯光做各种指示图案,路面指引投影等延伸功能。
对于汽车尾灯的流水,动态效果(迎宾,欢送)等的技术解决方案,目前较常用的一种是通过纯硬件方案实现简单的流水功能,但是流水时间不可随意调节,且误差大,不同侧的灯串因器件偏差,使用环境导致的时间延迟,易导致流水卡顿,或不流畅等问题影响用户体验;另一种是在硬件方案的基础上增加微控制器,解决时间延迟问题,但无论是不同侧还是同侧但不同灯板情况下,存在多个微处理器时钟同步问题,且由于车灯发展使得动态效果越来越复杂,灯板数量大幅增加,尾灯灯板多达数十块,这种方案增加了线束的复杂度,存在电磁兼容的隐患,成本的增加更不可避免。
发明内容
为解决上述问题,本发明提供一种实现汽车尾灯动态效果的电子控制模块,通过该模块统一处理来自车身的指令,将指令转化为串口信息传送到所有目标灯板的驱动芯片对灯进行控制,解决不同灯板间的时间延迟,及时钟同步问题,线束简单,不同侧灯板实现联动控制,该模块独立于灯板,可沿用的不同的平台及车型,大大节省开发周期及开发费用,解决了背景技术中出现的问题。
本发明的目的是提供一种实现汽车尾灯动态效果的电子控制模块,包括微处理器控制单元,系统基础控制单元,电源管理单元,CAN收发器,信号检测电路,防护滤波电路,故障输出电路,和接口电路组成,接口电路包括到车身的接口电路,到灯板的接口电路;
来自车身的控制信号一部分经过防护滤波电路到信号检测电路输入到微处理器控制单元,进行数据处理;另一部分传送至系统基础控制单元进行信号监测;微处理器控制单元通过CAN收发器与到灯板的接口电路双向连接,实现微处理器控制单元通过CAN收发器与灯板双向通信;微处理器控制单元与电源管理单元双向相连进行控制诊断;微处理器控制单元1到灯板的接口电路通过PWM信号进行通信;
微处理器控制单元将采集到的车身控制指令转换为通信信息在CAN总线上传送到灯板,对灯板上的LED进行配置,从而灵活实现各种客户定制化的动态效果,同时,该电子控制模块通过系统基础控制单元,以及电源管理单元对车灯系统的状态监测,功能安全管理,暗电流管理,以及统一供电功能。
进一步改进在于:微处理器控制单元为独立于LED驱动灯板、LED灯板的控制器,独立的微处理器控制单元通过在CAN收发器的物理层上使用UART ON CAN技术,与多个灯板实现双向通信,进行灯板的参数配置,以及反馈灯板上的信息,实现一个电子控制模块拖挂多个灯板;多个灯板与电子控制单元中的到灯板的接口电路连接,灯板上设置有驱动芯片。
进一步改进在于:所述微处理器控制单元接收来自于信号检测电路的输出信息的位置处设置有高精度模数端口,电子控制模块通过微处理器控制单元的高精度模数端口,接受来自于信号检测电路的信息,对整个汽车尾灯系统的温度,开路短路,过压,过流,通信中断等故障进行实时监控,微处理器控制单元的嵌入式软件对故障进行记录,上报,以及实施必要安全策略;如在发生通信故障时,保持尾灯常亮,保障正常车灯指示功能。
进一步改进在于:对整个汽车尾灯系统进行统一的电源供电和管理,根据用户习惯,通过微处理器控制单元,系统基础控制单元,电源管理单元,将整个系统进入不同深度的睡眠模式,深度睡眠时系统功耗可降低至1毫瓦,当监测到唤醒信号时,通过优化微处理器控制单元和电源管理单元的软件程序及硬件响应时间,快速响应唤醒整个系统进行,延迟时间只在微秒级别。
进一步改进在于:该电子控制模块采用PWM通信协议,可与相同电子控制单元进行同步,互相之间在软件层上为主从控制逻辑和关系,实现拖挂更多灯板。
本发明的有益效果:本发明代替传统分散在灯板上的多个控制单元,控制全部尾灯,解决动态效果的流畅性及提供更多样更个性化动态效果的可能,本发明使用一个电子控制单元对车灯进行统一管理,提供稳定可靠的控制方式,节省元器件费用,减少布线复杂度,减少线束费用,降低电磁兼容风险。
本发明独立于灯板,不受车灯外形结构限制,提供多种用户接口和多种通信方式,可移植到不同的项目,降低研发风险,缩短研发周期,节省数以百万计的研发费用。
附图说明
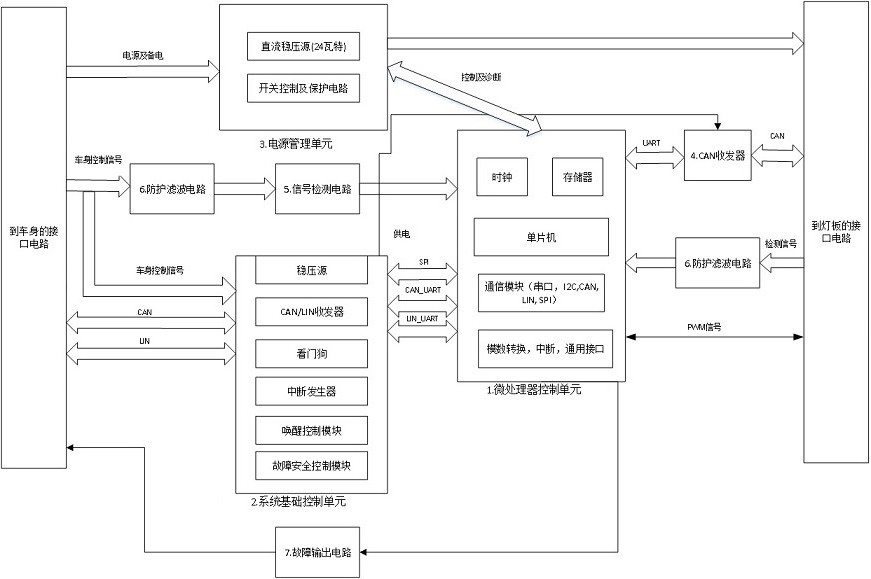
图1为本发明电子控制模块原理框图。
图2使用多个本发明的电子控制单元时的系统拓展示意图。
其中:1-微处理器控制单元,2-系统基础控制单元,3-电源管理单元,4-CAN收发器,5-信号检测电路,6-防护滤波电路,7-故障输出电路。
具体实施方式
为了加深对本发明的理解,下面将结合实施例对本发明作进一步详述,该实施例仅用于解释本发明,并不构成对本发明保护范围的限定。
如图1和2所示,本实施例提供一种实现汽车尾灯动态效果的电子控制模块,包括微处理器控制单元1,系统基础控制单元2,电源管理单元3,CAN收发器4,信号检测电路5,防护滤波电路6,故障输出电路7,和接口电路组成,接口电路包括到车身的接口电路,到灯板的接口电路。
到车身的接口电路输入车身电池电压到电源管理单元3,电源管理单元3将转换后的稳定电压通过到灯板的接口电路输出到至少一个的灯板;到车身的接口电路与系统基础控制单元2通过LIN/CAN双向通信;来自车身的控制信号一部分经过防护滤波电路到信号检测电路5输入到微处理器控制单元1,进行数据处理;另一部分传送至系统基础控制单元2进行信号监测;从灯板采集到的数据经到灯板的接口电路再通过防护滤波电路6输入到微处理器控制单元1,进行数据处理;微处理器控制单元1通过CAN收发器4与到灯板的接口电路双向连接,实现微处理器控制单元1通过CAN收发器4与灯板双向通信;微处理器控制单元1与系统基础控制单元2通过SPI,CAN_UART,LIN_UART进行双向通信;系统基础控制单元2与CAN收发器4连接实现对CAN收发器4提供稳定供电。
微处理器控制单元1与信号检测电路5连接接受来自于信号检测电路5的信息,信号检测电路5与防护滤波电路6连接接受来自于防护滤波电路6的信息,防护滤波电路6连接到车身的接口电路接收控制信号;微处理器控制单元1连接故障输出电路7,故障输出电路7连接到车身的接口电路;微处理器控制单元1与电源管理单元3双向相连进行控制诊断;微处理器控制单元1到灯板的接口电路通过PWM信号进行通信。
独立的微处理器控制单元1,通过CAN收发器4及UART ON CAN技术,与连接至到灯板的接口电路的多个灯板实现双向通信,进行灯的参数配置及将其写入多个灯板中,以及得到多个灯板上反馈的信息,实现一个电子控制模块拖挂多个灯板;
同时,进一步使用独有的PWM通信协议,可与相同电子控制单元进行同步,软件层上具有主从控制的逻辑和关系,实现拖挂更多灯板;
本发明中实施睡眠管理电路,在检测到车主长时间如5分钟没有使用车灯指示需求,通过微处理器控制单元1,系统基础控制单元2,电源管理单元3,配置由各个模块及外接多个灯板组成的整个系统进入睡眠模式,其中外接灯板通过到灯板接口电路实现与本发明电子控制单元的连接;
本实施例中的检测信号会采集车身及连接于到灯板的接口电路的多个灯板的数据,通过设置于微处理器控制单元1的嵌入式软件进行综合处理分析,嵌入式软件通过单片机内部发出指令,存储器运算和执行指令,从而输出硬线电平给车身控制器BCM,BCM为领域内人员公知内容,用于用户警告,提高安全性。
图1中1为微处理器控制单元,包含单片机,ROM/RAM存储器,时钟,通信控制模块,以及各种接口模块。是整个模块的大脑,完成:通过SPI对系统基础控制单元2进行配置和管理,设置睡眠模式,控制系统基础控制单元2内部开关,看门狗模块参数灯等;处理来自于信号检测电路5的检测信号,进行高精度的模数转换,处理中断,对外设进行轮询,输出控制信号等;该单元支持CAN/LIN协议栈,对接主机通信要求;通过UART与CAN收发器4进行基于CAN物理层的通信,对灯进行流明,亮灭,流水,动态等配置,支持多个外设,速率可达到500kbps;采集灯板上的传感器信息,处理后输出故障信号给车身控制器,同时上报。
图1中2为系统基础控制单元,包含稳压源,CAN/LIN收发器,看门狗,中断发生器,唤醒控制模块,故障安全控制模块。配备标准CAN/LIN收发器,用于与车身管理器进行通信,接收配置指令,车身状态信息,以及上传自身状态等;包含稳压源,本实施例采用3个稳压源,并且为低噪稳压源,为微处理器控制单元1和CAN收发器4等提供稳定供电;看门狗电路用于检测微处理器控制单元1的状态,当微处理器控制单元1的软件程序失效,系统崩溃,故障安全控制模块发出重置信号对微处理器控制单元1进行重置;该单元通过唤醒控制模块实现静态电流管理和控制,当通过SPI收到微处理器控制单元1发来的睡眠指令,系统基础控制单元2将依据睡眠深度逐个关闭稳压源输出,并保持唤醒脚供电,当唤醒脚收到边沿触发信号后,恢复对微处理器控制单元1的供电,并开始系统初始化。
图1中3为电源管理单元,包含直流稳压源保护和开关电路,最大24W的直流稳压电源,用于外设的多个灯板的统一供电,灯板无需再配备电源转换电路,同时包括保护和开关电路,通过微处理器控制单元1对外设的多个灯板供电进行管理,同时稳压源上报故障给1,保证可靠性。
图1中4为标准的CAN收发器,用于灯板控制信号在CAN物理层上的收发。
图1中5为信号检测电路,匹配后输入到微处理器控制单元1,实现高精度信号监测
图1中6为防护滤波电路,将从灯板上采集到的传感器信息进行滤波及端口防护
图1中7为故障输出电路,微处理器控制单元1处理来自于防护滤波电路6的信息,已经通过UART从灯板驱动器得到的失效信息后输出控制电平到故障输出电路7,输出与车身控制器协商好的电平信号到车身控制器。
当使用多个实现汽车尾灯动态效果的电子控制模块,即如图2所示的车灯中包括电子控制模块一、电子控制模块二、电子控制模块三,电子控制模块一和电子控制模块二之间通过PWM信号进行通信,所述电子控制模块二和电子控制模块三之间通过PWM信号进行通信,具体为电子控制模块一、电子控制模块二、电子控制模块三中的各自的微处理器控制单元1之间通过PWM信号进行连接和通信控制、同步信息,每个电子控制模块都能够拖挂多个灯板,由此通过多个电子控制模块之间的连接和通信,实现对系统的扩展,在车灯整体上能够拖挂更多数量的灯板。
在本实施例一个电子控制模块能够拖挂多个灯板、驱动多动态效果的有益效果的基础上,多个电子控制模块之间的连接和通信能够进一步增加拖挂灯板的数量,这尤其适用于车灯需使用的灯板数量极其多,动态效果数量极其多、复杂,一个电子控制模块不够拖挂需要的所有灯板的情况时。多个电子控制模块虽然物理层上是一样的部件,但在上述多个电子控制模块的软件连接层面,是存在着上级控制模块和下级控制模块的概念区分的,上级层面的电子控制模块的微处理器控制单元1通过PWM信号与下级电子控制模块的微处理器控制单元1相连同步信息,进行系统扩展,实现拖挂更多的灯板。
- 实现汽车尾灯动态效果的电子控制模块
- 利用乳白内透镜和LED模组实现位置灯、侧标志灯功能的汽车尾灯