聚醚醚酮人工脊柱融合器疲劳测试方法及疲劳测试装置
文献发布时间:2023-06-19 10:24:22
技术领域
本发明属于人工脊柱融合器设计优化与性能测试技术领域,具体涉及一种聚醚醚酮人工脊柱融合器体液环境中的疲劳测试方法及测试装置。
背景技术
目前,利用聚醚醚酮制作的人工植入物正在广泛应用,尤其是人工脊柱融合器(脊椎间盘)的制作材料,具有强度高,生物相容性好,经久耐用等优点;很多聚醚醚酮人工植入物在替代人体骨骼之前需要进行生物力学性能的测试,传统的人工融合器测试方法只能测试单一的压缩或者扭转疲劳,并且载荷具有刚性冲击,不适用于新型聚醚醚酮材料的人工植入物的疲劳测试;另外,人体内的体液和温度环境在传统疲劳测试装置中无法得到充分的表征,使聚醚醚酮人工植入物的应用推广发展缓慢。需要设计一种可以方便进行体液环境模拟,且能够进行压缩疲劳和扭转疲劳测试的多功能聚醚醚酮人工脊柱融合器疲劳测试方法。
早前,颈椎前路减压植骨融合术一直被认为是治疗颈椎病的经典术式,自体髂骨植骨亦为“金标准”植骨方式。可是,颈椎前路减压植骨融合术存在很多难以克服的缺陷:植骨块容易发生移位,植骨融合率有待提高,术后需要行长时间外固定,易出现并发症等。近年来,颈椎间融合器在颈椎病手术中开始广泛应用,从效果上评判:其既能实现植入后的即时稳定性,又能促进融合,并很好地重建并维持椎间隙高度和颈椎生理曲度。故此,越来越受到各方青睐。
国家标准《脊柱植入物椎间融合器力学性能试验方法》中涉及:压缩试验装置、压缩-剪切试验装置、销-槽万向节形状的剪切实验装置、球形万向节形状(十字交叉)的扭转实验装置;还提及下述技术参数的实验测量要求:最大疲劳载荷或扭矩、机械失效、角位移偏移量、位移偏移量、残余变形、刚度、实验块、极限位移、极限载荷或扭矩、屈服极限、屈服载荷或扭矩。以中华人民共和国医药行业标准YY/T 0959-2014为代表的相关技术文献披露了脊柱植入物椎间融合器的力学性能试验方法,其还具体披露了压缩试验装置、压缩-剪切试验装置、销-槽万向节形状的剪切试验装置、球形万向节形状的扭转实验装置。但是,前述技术文献目前还只是较粗略的建议内容。
针对各种典型的聚醚醚酮人工脊柱融合器设计和应用方案,人们还迫切需要获得与之配套的脊柱植入物椎间融合器相关的性能实验方法等关联技术。
发明内容
本发明的目的是提供一种能够针对聚醚醚酮人工脊柱融合器进行压缩和扭转试验的疲劳测试方法及其专用的聚醚醚酮人工脊柱融合器疲劳测试装置;其能够在GB/T16825.1、GB/T 10623和中华人民共和国医药行业标准YY/T 0959-2014等的基础上,提出了自成体系的一种能够针对聚醚醚酮人工脊柱融合器进行压缩和扭转试验的疲劳测试方法及其专用的聚醚醚酮人工脊柱融合器疲劳测试装置。医学界通过一系列体内外实验已明确得知:聚醚醚酮聚合物与人体组织有良好的相容性,聚醚醚酮聚合物的弹性模量很接近骨,其同时还具有良好的塑性和硬度,是极好的椎间融合器材料。本发明专门针对聚醚醚酮人工脊柱融合器的材料特性和一些特定的结构特性设计专门的聚醚醚酮人工脊柱融合器疲劳测试方法及其专用的疲劳测试装置;其在满足一般标准的同时,尤其适合于聚醚醚酮人工脊柱融合器的疲劳测试技术领域。
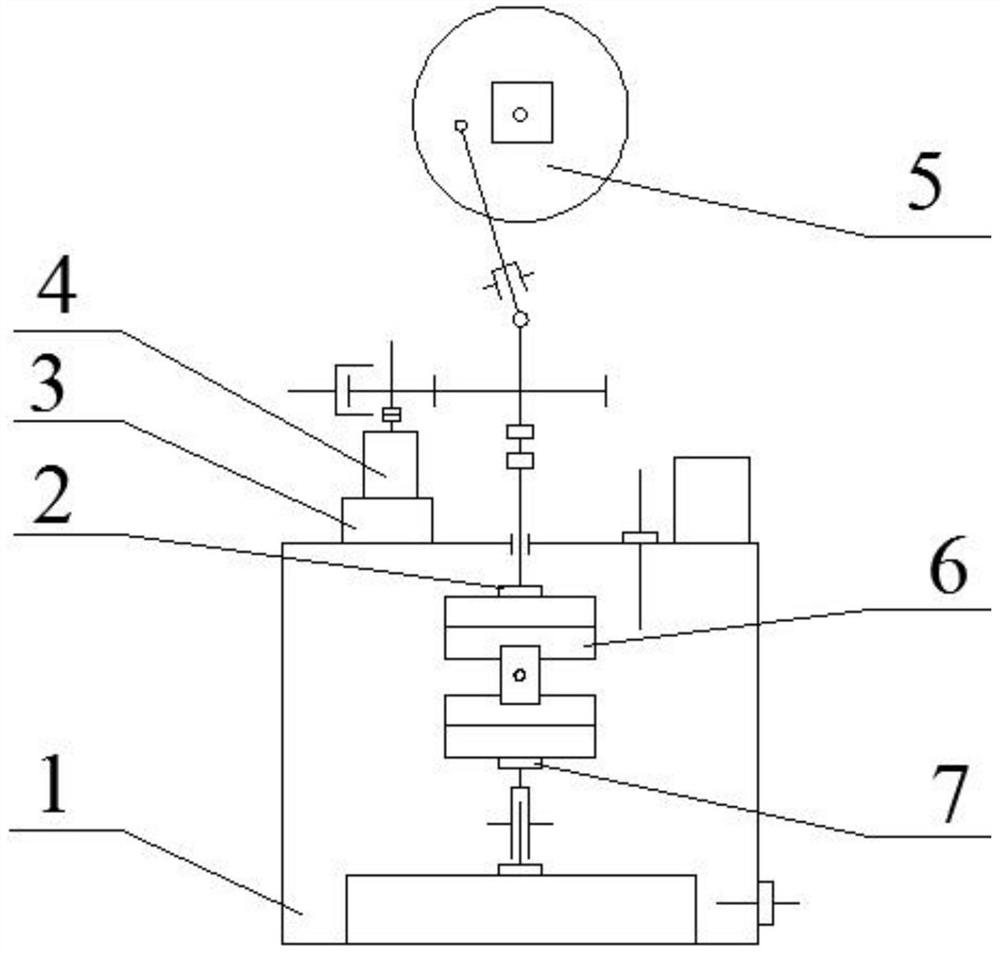
本发明提供了一种聚醚醚酮人工脊柱融合器疲劳测试方法,其特征在于:所述聚醚醚酮人工脊柱融合器疲劳测试方法使用专门的聚醚醚酮人工脊柱融合器疲劳测试装置,聚醚醚酮人工脊柱融合器疲劳测试装置的构成如下:体液模拟模块1、法兰A2、电机底座3、扭转驱动模块4、压缩驱动模块5、夹具模块6和法兰B7;其中:夹具模块6通过法兰B7与体液模拟模块1连接,夹具模块6通过法兰A2与压缩驱动模块5连接,所述扭转驱动模块4与压缩驱动模块5通过齿轮啮合连接,所述扭转驱动模块4通过电机底座3与体液模拟模块1连接,夹具模块6通过法兰A2与体液模拟模块1连接;
所述夹具模块6的结构构成如下:下夹板601、下聚缩醛块602、上夹板603、上聚缩醛块604;其中:下夹板601、下聚缩醛块602通过螺栓固定连接为一体,下夹板601通过法兰B7与内螺纹杆107连接,上夹板603、上聚缩醛块604通过螺栓固定连接为一体,上夹板603通过法兰A2与齿轮轴501连接;下聚缩醛块602、上聚缩醛块604配合构成能够放置聚醚醚酮人工脊柱融合器605的空腔结构;
下聚缩醛块602顶部和上聚缩醛块604底部分别开有用于放置实验件即聚醚醚酮人工脊柱融合器的主体部分主要轮廓形状为长方体的空腔,下聚缩醛块602和上聚缩醛块604空腔尺寸由对应的人工融合器尺寸确定,下聚缩醛块602和上聚缩醛块604空腔尺寸相同,两者上的空腔深度之和不超过聚醚醚酮人工脊柱融合器605高度三分之二;用于放置聚醚醚酮人工脊柱融合器605的空腔结构宽度和长度尺寸与融合器605的宽度和长度相同,两者在长度和宽度方向上属于过盈配合,融合器605装夹在下聚缩醛块602和上聚缩醛块604之间的空腔内,下聚缩醛块602与下夹板601随着内螺纹杆107和外螺纹杆108二者之间螺纹副的相对运动实现人工融合器在空腔结构内的夹紧;(以保证在针对聚醚醚酮人工脊柱融合器进行压缩实验的过程中,下聚缩醛块602和上聚缩醛块604分别与聚醚醚酮人工脊柱融合器605结合紧密,以便能够实施压缩或/和扭转实验;)融合器605和下聚缩醛块602一起通过法兰B7,内螺纹107和外螺纹杆108固定在玻璃箱101底部,上聚缩醛块604在压缩驱动模块5作用下沿直线上下运动,上聚缩醛块604空腔底部压缩载荷作用在融合器605顶部,实现人工融合器的压缩疲劳实验;上聚缩醛块604在扭转驱动模块4作用下扭转往复运动,上聚缩醛块604空腔内壁的扭转剪切载荷作用在融合器605侧面上,实现人工融合器605的扭转疲劳实验;
压缩驱动模块5的构成如下:齿轮轴501、扭矩传感器502、齿轮503、偏心轮504、伺服电机505、连杆506、连杆电动拨叉507和测力传感器508;压缩驱动模块5主要用于实现夹具6的压缩载荷施加;扭矩传感器502和测力传感器508均安装在齿轮轴501上;齿轮503和齿轮轴501采用平键周向固定连接,连杆506的其中一端通过转动副与齿轮轴501连接,偏心轮504上的偏心连接点通过转动副与连杆506的另一端连接,电机505与偏心轮504连接,偏心轮504的几何中心与齿轮轴501共线,电机505带动偏心轮504绕着几何中心转动;
连杆拨叉507控制连杆506与齿轮轴501的连接与脱离,通过连杆506带动齿轮轴501沿其轴向往复运动,从而实现上聚缩醛块604上下往复运动;
由于下聚缩醛块602通过锁紧开关104固定不动,上聚缩醛块604与下聚缩醛块602之间的空腔结构体积变化,实现人工融合器的压缩疲劳载荷施加;
所述聚醚醚酮人工脊柱融合器疲劳测试方法的要求是:
在体液模拟模块1中放置有恒温生理盐水,用以模拟人体温度、湿度、盐度等生理液体环境;用以实验的聚醚醚酮人工脊柱融合器布置在体液模拟模块1中的恒温生理盐水中;
体液模拟生理盐水的主要成分及离子浓度含量的要求如下:
Na
生理盐水PH值为7.4,控制系统106与温度控制器105采用通信连接,通过温度控制器实现玻璃箱101内模拟体液的温度控制,可以模拟的恒温体液环境温度范围为30℃-48℃针对一般的宠物及人体温度,一般温度波动范围在±0.5℃以内;控制系统106与电磁阀109采用通信连接,通过电磁阀109的开闭将不同体液注入和流出玻璃箱101;
聚醚醚酮人工脊柱融合器布置在夹具模块6中的下聚缩醛块602和上聚缩醛块604共同构成的空腔中,在压缩驱动模块5中的连杆506带动齿轮轴501沿其轴向运动进而实现夹具6的打开与闭合运动,从而对融合器进行压缩疲劳载荷施加。
所述聚醚醚酮人工脊柱融合器疲劳测试方法中,优选还要求保护下述内容:
压缩驱动模块5中,假设伺服电机505的输出角速度为ω=1.26rad/s,偏心轮504的半径为R=0.1m,偏心距为
①式中,x和t表示上聚缩醛块604的位移和时间,λ为偏心轮504的偏心距与连杆506长度之比,即
将上聚缩醛块604的运动位移方程1对时间取一阶导数,得到上聚缩醛块604的速度方程表达式:
②式中,
将上聚缩醛块604的运动位移方程1对时间取二阶导数,可以得到上聚缩醛块604的加速度方程表达式:
③式中,
在体液模拟模块1中放置的恒温生理盐水的主要成分及离子浓度含量的要求如下:
Na
生理盐水PH值为7.4,模拟的恒温体液环境温度范围为30℃-48℃针对一般的宠物及人体温度,温度波动范围在±0.5℃以内;
在体液模拟模块1中还设置有控制系统106、温度控制器105、电磁阀109;二者采用通信连接,通过温度控制器实现玻璃箱101内模拟体液的温度控制,控制系统106与电磁阀109采用通信连接,通过电磁阀109的开闭将不同体液注入和流出玻璃箱101。
体液模拟模块1具体由以下部分构成:玻璃箱101、底座102、法兰103、锁紧开关104、电磁阀109、内螺纹杆107、外螺纹杆108、温度控制器105和控制系统106;其中:玻璃箱101是整个体液模拟模块1的安装基础;底座102与玻璃箱101连接,外螺纹杆108通过法兰102与底座102连接,内螺纹杆107与外螺纹杆108配合连接;用于实现内螺纹杆107与外螺纹杆108二者之间螺纹副的运动和固定的锁紧开关104布置在外螺纹杆108上(并能够在必要时与内螺纹杆107实现干涉);内螺纹杆107与外螺纹杆108通过锁紧开关104的开闭实现螺纹副的运动和固定;
通过内螺纹杆107调节夹具模块6的开口大小,以适应不同高度的人工融合器疲劳测试实验。
扭转驱动模块4具体构成如下:伺服电机401、齿轮电动拨叉402、齿轮轴403、齿轮404和联轴器405;其中:
伺服电机401通过齿轮轴403带动齿轮404往复转动,通过齿轮拨叉402控制齿轮404与压缩驱动模块5中的齿轮503啮合,带动齿轮轴501往复转动,从而带动夹具6实现融合器的扭转疲劳测试;齿轮404能够在拨叉402的控制下在齿轮轴403上滑移;
伺服电机401通过联轴器405与齿轮轴403连接,齿轮404与齿轮轴403采用平键连接,齿轮电动拨叉402通过上下移动实现齿轮404与压缩驱动模块5中的齿轮503啮合与脱离;
体液模拟模块1中还设置有控制系统106,伺服电机401与控制系统106采用通信连接,控制系统106给予伺服电机401的正反转,正反旋转交替频率为5Hz,旋转角度范围为±10°,伺服电机401正反转角度变化曲线如图9;
控制系统106与电磁阀109、温度控制系统108、步进电机401、伺服电机505、连杆电动拨叉507、齿轮电动拨叉402、扭矩传感器502和压力传感器508采用通信连接。
直齿轮404与直齿轮503的齿数比为1:2;伺服电机401的扭转运动通过直齿轮404传递给直齿轮503,直齿轮503的扭转运动依次通过齿轮轴501、法兰A2、上夹板603传递给上聚缩醛块604,上聚缩醛块604通过空腔结构将扭转动作施加在空腔内的人工融合器上,实现了人工融合器的扭转疲劳测试。
所述聚醚醚酮人工脊柱融合器扭矩疲劳测试方法还满足下述要求之一或其组合:
其一,控制系统106首先控制连杆电动拨叉507的动作调整使连杆506与齿轮轴501脱离,然后通过控制齿轮电动拨叉402的动作调整使齿轮404与齿轮503啮合,同时启动伺服电机401输出正反转运动;伺服电机401的扭转运动通过直齿轮404传递给直齿轮503,直齿轮503的扭转运动依次通过齿轮轴501、法兰A2、上夹板603传递给上聚缩醛块604,上聚缩醛块604通过空腔结构将扭转动作施加在空腔内的人工融合器上,实现了人工融合器的扭转疲劳测试;
所述聚醚醚酮人工脊柱融合器压缩疲劳测试方法中,控制系统106首先使伺服电机401停止,通过控制齿轮电动拨叉402的动作调整使齿轮404与齿轮503脱离啮合,通过控制连杆电动拨叉507的动作调整使连杆506与齿轮轴501连接,同时启动步进电机505输出恒定转速,步进电机505的转动运动依次通过偏心轮504、连杆506、齿轮轴501、法兰A2、上夹板603传递给上聚缩醛块604,上聚缩醛块604通过空腔结构将上下直线移动动作施加在空腔内的人工融合器上,实现了人工融合器的压缩疲劳测试;
其二,下聚缩醛块602顶部和上聚缩醛块604底部分别开有长方形的空腔,下聚缩醛块602和上聚缩醛块604空腔尺寸由对应的人工融合器尺寸确定,下聚缩醛块602和上聚缩醛块604空腔尺寸相同,两者深度之和不超过聚醚醚酮人工脊柱融合器605高度三分之二,空腔宽度和长度尺寸与融合器605的宽度和长度相同,两者在长度和宽度方向上属于过盈配合,融合器605装夹在下聚缩醛块602和上聚缩醛块604之间的空腔内,下聚缩醛块602与下夹板601随着内螺纹杆107和外螺纹杆108二者之间螺纹副的相对运动实现人工融合器在空腔结构内的夹紧;融合器605和下聚缩醛块602一起通过法兰B7,内螺纹107和外螺纹杆108固定在玻璃箱101底部,上聚缩醛块604在压缩驱动模块5作用下上下直线移动运动,上聚缩醛块604空腔底部压缩载荷作用在融合器605顶部,实现人工融合器的压缩疲劳实验;上聚缩醛块604在扭转驱动模块4作用下扭转往复运动,上聚缩醛块604空腔内壁的扭转剪切载荷作用在融合器605侧面上,实现人工融合器605的扭转疲劳实验。
本发明还要求保护聚醚醚酮人工脊柱融合器疲劳测试装置,其构成如下:体液模拟模块1、法兰A2、电机底座3、扭转驱动模块4、压缩驱动模块5、夹具模块6和法兰B7;其中:夹具模块6通过法兰B7与体液模拟模块1连接,夹具模块6通过法兰A2与压缩驱动模块5连接,所述扭转驱动模块4与压缩驱动模块5通过齿轮啮合连接,所述扭转驱动模块4通过电机底座3与体液模拟模块1连接,夹具模块6通过法兰A2与体液模拟模块1连接;
所述夹具模块6的结构构成如下:下夹板601、下聚缩醛块602、上夹板603、上聚缩醛块604;其中:下夹板601、下聚缩醛块602通过螺栓固定连接为一体,下夹板601通过法兰B7与内螺纹杆107连接,上夹板603、上聚缩醛块604通过螺栓固定连接为一体,上夹板603通过法兰A2与齿轮轴501连接;下聚缩醛块602、上聚缩醛块604配合构成能够放置聚醚醚酮人工脊柱融合器605的空腔结构;
下聚缩醛块602顶部和上聚缩醛块604底部分别开有用于放置实验件即聚醚醚酮人工脊柱融合器的主体部分主要轮廓形状为长方体的空腔,下聚缩醛块602和上聚缩醛块604空腔尺寸由对应的人工融合器尺寸确定,下聚缩醛块602和上聚缩醛块604空腔尺寸相同,两者上的空腔深度之和不超过聚醚醚酮人工脊柱融合器605高度三分之二;用于放置聚醚醚酮人工脊柱融合器605的空腔结构宽度和长度尺寸与融合器605的宽度和长度相同,两者在长度和宽度方向上属于过盈配合,融合器605装夹在下聚缩醛块602和上聚缩醛块604之间的空腔内,下聚缩醛块602与下夹板601随着内螺纹杆107和外螺纹杆108二者之间螺纹副的相对运动实现人工融合器在空腔结构内的夹紧;(以保证在针对聚醚醚酮人工脊柱融合器进行压缩实验的过程中,下聚缩醛块602和上聚缩醛块604分别与聚醚醚酮人工脊柱融合器605结合紧密,以便能够实施压缩或/和扭转实验;)融合器605和下聚缩醛块602一起通过法兰B7,内螺纹107和外螺纹杆108固定在玻璃箱101底部,上聚缩醛块604在压缩驱动模块5作用下沿直线上下运动,上聚缩醛块604空腔底部压缩载荷作用在融合器605顶部,实现人工融合器的压缩疲劳实验;上聚缩醛块604在扭转驱动模块4作用下扭转往复运动,上聚缩醛块604空腔内壁的扭转剪切载荷作用在融合器605侧面上,实现人工融合器605的扭转疲劳实验;
压缩运动模块5的构成如下:齿轮轴501、扭矩传感器502、齿轮503、偏心轮504、伺服电机505、连杆506、连杆电动拨叉507和测力传感器508;压缩运动模块5主要用于实现夹具6的压缩驱动;扭矩传感器502和测力传感器508均安装在齿轮轴501上;齿轮503和齿轮轴501采用平键周向固定连接,连杆506的其中一端通过转动副与齿轮轴501连接,偏心轮504上的偏心连接点通过转动副与连杆506的另一端连接,电机505与偏心轮504连接,偏心轮504的几何中心与齿轮轴501共线,电机505带动偏心轮504绕着中心转动;
假设伺服电机505的输出角速度为ω=1.26rad/s,偏心轮504的半径为R=0.1m,偏心距为
①式中,x和t表示上聚缩醛块604的位移和时间,λ为偏心轮504的偏心距与连杆506长度之比,即
将上聚缩醛块604的运动位移方程1对时间取一阶导数,得到上聚缩醛块604的速度方程表达式:
②式中,
将上聚缩醛块604的运动位移方程1对时间取二阶导数,可以得到上聚缩醛块604的加速度方程表达式:
③式中,
连杆拨叉507控制连杆506与齿轮轴501的连接与脱离,通过连杆506带动齿轮轴501沿其轴向往复运动,从而实现上聚缩醛块604上下往复运动;
由于下聚缩醛块602通过锁紧开关104固定不动,上聚缩醛块604与下聚缩醛块602之间的空腔结构体积变化,实现人工融合器的压缩疲劳实验;
所述聚醚醚酮人工脊柱融合器疲劳测试方法的要求是:
在体液模拟模块1中放置有恒温生理盐水,用以模拟人体温度、湿度、盐度等生理液体环境;用以实验的聚醚醚酮人工脊柱融合器布置在体液模拟模块1中的恒温生理盐水中;
体液模拟生理盐水的主要成分及离子浓度含量的要求如下:
Na
生理盐水PH值为7.4,控制系统106与温度控制器105采用通信连接,通过温度控制器实现玻璃箱101内模拟体液的温度控制,可以模拟的恒温体液环境温度范围为30℃-48℃针对一般的宠物及人体温度,一般温度波动范围在±0.5℃以内;控制系统106与电磁阀109采用通信连接,通过电磁阀109的开闭将不同体液注入和流出玻璃箱101;
聚醚醚酮人工脊柱融合器布置在夹具模块6中的下聚缩醛块602和上聚缩醛块604共同构成的空腔中,在压缩运动模块5中的连杆506带动齿轮轴501沿其轴向运动进而实现夹具6的打开与闭合运动,从而对融合器进行压缩疲劳实验。
体液模拟模块1具体由以下部分构成:玻璃箱101、底座102、法兰103、锁紧开关104、电磁阀109、内螺纹杆107、外螺纹杆108、温度控制器105和控制系统106;其中:玻璃箱101是整个体液模拟模块1的安装基础;底座102与玻璃箱101连接,外螺纹杆108通过法兰102与底座102连接,内螺纹杆107与外螺纹杆108配合连接;用于实现内螺纹杆107与外螺纹杆108二者之间螺纹副的运动和固定的锁紧开关104布置在外螺纹杆108上(并能够在必要时与内螺纹杆107实现干涉);内螺纹杆107与外螺纹杆108通过锁紧开关104的开闭实现螺纹副的运动和固定;
通过内螺纹杆107调节夹具模块6的开口大小,以适应不同高度的人工融合器疲劳测试实验;
聚醚醚酮人工脊柱融合器疲劳测试装置,其特征在于:扭转驱动模块4具体构成如下:伺服电机401、齿轮电动拨叉402、齿轮轴403、齿轮404和联轴器405;其中:
伺服电机401通过齿轮轴403带动齿轮404往复转动,通过齿轮拨叉402控制齿轮404与压缩驱动模块5中的齿轮503啮合,带动齿轮轴501往复转动,从而带动夹具6实现融合器的扭转疲劳测试;齿轮404能够在拨叉402的控制下在齿轮轴403上滑移;
伺服电机401通过联轴器405与齿轮轴403连接,齿轮404与齿轮轴403采用平键连接,齿轮电动拨叉402通过上下移动实现齿轮404与压缩驱动模块5中的齿轮503啮合与脱离;
体液模拟模块1中还设置有控制系统106,伺服电机401与控制系统106采用通信连接,控制系统106给予伺服电机401的正反转,正反旋转交替频率为5Hz,旋转角度范围为±10°,伺服电机401正反转角度变化曲线如图9;
控制系统106与电磁阀109、温度控制系统108、步进电机401、伺服电机505、连杆电动拨叉507、齿轮电动拨叉402、扭矩传感器502和压力传感器508采用通信连接。
直齿轮404与直齿轮503的齿数比为1:2;伺服电机401的扭转运动通过直齿轮404传递给直齿轮503,直齿轮503的扭转运动依次通过齿轮轴501、法兰A2、上夹板603传递给上聚缩醛块604,上聚缩醛块604通过空腔结构将扭转动作施加在空腔内的人工融合器上,实现了人工融合器的扭转疲劳测试。
所述聚醚醚酮人工脊柱融合器扭矩疲劳测试装置还满足下述要求之一或其组合:
其一,控制系统106首先控制连杆电动拨叉507的动作调整使连杆506与齿轮轴501脱离,然后通过控制齿轮电动拨叉402的动作调整使齿轮404与齿轮503啮合,同时启动伺服电机401输出正反转运动;伺服电机401的扭转运动通过直齿轮404传递给直齿轮503,直齿轮503的扭转运动依次通过齿轮轴501、法兰A2、上夹板603传递给上聚缩醛块604,上聚缩醛块604通过空腔结构将扭转动作施加在空腔内的人工融合器上,实现了人工融合器的扭转疲劳测试;
所述聚醚醚酮人工脊柱融合器压缩疲劳测试方法中,控制系统106首先使伺服电机401停止,通过控制齿轮电动拨叉402的动作调整使齿轮404与齿轮503脱离啮合,通过控制连杆电动拨叉507的动作调整使连杆506与齿轮轴501连接,同时启动步进电机505输出恒定转速,步进电机505的转动运动依次通过偏心轮504、连杆506、齿轮轴501、法兰A2、上夹板603传递给上聚缩醛块604,上聚缩醛块604通过空腔结构将上下直线移动动作施加在空腔内的人工融合器上,实现了人工融合器的压缩疲劳测试;
其二,下聚缩醛块602顶部和上聚缩醛块604底部分别开有长方形的空腔,下聚缩醛块602和上聚缩醛块604空腔尺寸由对应的人工融合器尺寸确定,下聚缩醛块602和上聚缩醛块604空腔尺寸相同,两者深度之和不超过聚醚醚酮人工脊柱融合器605高度三分之二,空腔宽度和长度尺寸与融合器605的宽度和长度相同,两者在长度和宽度方向上属于过盈配合,融合器605装夹在下聚缩醛块602和上聚缩醛块604之间的空腔内,下聚缩醛块602与下夹板601随着内螺纹杆107和外螺纹杆108二者之间螺纹副的相对运动实现人工融合器在空腔结构内的夹紧;融合器605和下聚缩醛块602一起通过法兰B7,内螺纹107和外螺纹杆108固定在玻璃箱101底部,上聚缩醛块604在压缩驱动模块5作用下上下直线移动运动,上聚缩醛块604空腔底部压缩载荷作用在融合器605顶部,实现人工融合器的压缩疲劳实验;上聚缩醛块604在扭转驱动模块4作用下扭转往复运动,上聚缩醛块604空腔内壁的扭转剪切载荷作用在融合器605侧面上,实现人工融合器605的扭转疲劳实验。
本发明能同时满足人体体液环境下聚醚醚酮人工脊柱融合器产品的压缩和扭转疲劳测试,产生的扭矩和压缩载荷具有柔性冲击,大大减少了刚性冲击造成惯性载荷的影响,具有测试精度高,适用范围广等优点。
本发明在现有技术基础上实现了实验方法的综合优化,具有较好的前瞻性和可操作性,完善了相关技术领域。其具有可预期的较为巨大的经济价值和社会价值。
附图说明
下面结合附图及实施方式对本发明作进一步详细的说明:
图1为聚醚醚酮人工脊柱融合器疲劳测试装置构成原理示意简图;
图2为体液模拟模块1的构成原理示意简图;
图3为扭转驱动模块4构成原理示意简图;
图4为压缩驱动模块5构成原理示意简图;
图5为夹具模块6构成原理示意简图;
图6为上聚缩醛块604上下往复运动位移曲线;
图7为上聚缩醛块604上下往复运动速度曲线;
图8为上聚缩醛块604上下往复运动加速度曲线;
图9为上聚缩醛块604上下往复运动位移曲线。
具体实施方式
实施例1
一种聚醚醚酮人工脊柱融合器疲劳测试方法,其使用专门的聚醚醚酮人工脊柱融合器疲劳测试装置,聚醚醚酮人工脊柱融合器疲劳测试装置的构成如下:体液模拟模块1、法兰A2、电机底座3、扭转驱动模块4、压缩驱动模块5、夹具模块6和法兰B7;其中:夹具模块6通过法兰B7与体液模拟模块1连接,夹具模块6通过法兰A2与压缩驱动模块5连接,所述扭转驱动模块4与压缩驱动模块5通过齿轮啮合连接,所述扭转驱动模块4通过电机底座3与体液模拟模块1连接,夹具模块6通过法兰A2与体液模拟模块1连接;
所述夹具模块6的结构构成如下:下夹板601、下聚缩醛块602、上夹板603、上聚缩醛块604;其中:下夹板601、下聚缩醛块602通过螺栓固定连接为一体,下夹板601通过法兰B7与内螺纹杆107连接,上夹板603、上聚缩醛块604通过螺栓固定连接为一体,上夹板603通过法兰A2与齿轮轴501连接;下聚缩醛块602、上聚缩醛块604配合构成能够放置聚醚醚酮人工脊柱融合器605的空腔结构;
下聚缩醛块602顶部和上聚缩醛块604底部分别开有用于放置实验件即聚醚醚酮人工脊柱融合器的主体部分主要轮廓形状为长方体的空腔,下聚缩醛块602和上聚缩醛块604空腔尺寸由对应的人工融合器尺寸确定,下聚缩醛块602和上聚缩醛块604空腔尺寸相同,两者上的空腔深度之和不超过聚醚醚酮人工脊柱融合器605高度三分之二;用于放置聚醚醚酮人工脊柱融合器605的空腔结构宽度和长度尺寸与融合器605的宽度和长度相同,两者在长度和宽度方向上属于过盈配合,融合器605装夹在下聚缩醛块602和上聚缩醛块604之间的空腔内,下聚缩醛块602与下夹板601随着内螺纹杆107和外螺纹杆108二者之间螺纹副的相对运动实现人工融合器在空腔结构内的夹紧;(以保证在针对聚醚醚酮人工脊柱融合器进行压缩实验的过程中,下聚缩醛块602和上聚缩醛块604分别与聚醚醚酮人工脊柱融合器605结合紧密,以便能够实施压缩或/和扭转实验;)融合器605和下聚缩醛块602一起通过法兰B7,内螺纹107和外螺纹杆108固定在玻璃箱101底部,上聚缩醛块604在压缩驱动模块5作用下沿直线上下运动,上聚缩醛块604空腔底部压缩载荷作用在融合器605顶部,实现人工融合器的压缩疲劳实验;上聚缩醛块604在扭转驱动模块4作用下扭转往复运动,上聚缩醛块604空腔内壁的扭转剪切载荷作用在融合器605侧面上,实现人工融合器605的扭转疲劳实验;
压缩运动模块5的构成如下:齿轮轴501、扭矩传感器502、齿轮503、偏心轮504、伺服电机505、连杆506、连杆电动拨叉507和测力传感器508;压缩运动模块5主要用于实现夹具6的压缩驱动;扭矩传感器502和测力传感器508均安装在齿轮轴501上;齿轮503和齿轮轴501采用平键周向固定连接,连杆506的其中一端通过转动副与齿轮轴501连接,偏心轮504上的偏心连接点通过转动副与连杆506的另一端连接,电机505与偏心轮504连接,偏心轮504的几何中心与齿轮轴501共线,电机505带动偏心轮504绕着中心转动;
连杆拨叉507控制连杆506与齿轮轴501的连接与脱离,通过连杆506带动齿轮轴501沿其轴向往复运动,从而实现上聚缩醛块604上下往复运动;
由于下聚缩醛块602通过锁紧开关104固定不动,上聚缩醛块604与下聚缩醛块602之间的空腔结构体积变化,实现人工融合器的压缩疲劳实验;
所述聚醚醚酮人工脊柱融合器疲劳测试方法的要求是:
在体液模拟模块1中放置有恒温生理盐水,用以模拟人体温度、湿度、盐度等生理液体环境;用以实验的聚醚醚酮人工脊柱融合器布置在体液模拟模块1中的恒温生理盐水中;
体液模拟生理盐水的主要成分及离子浓度含量的要求如下:
Na
生理盐水PH值为7.4,控制系统106与温度控制器105采用通信连接,通过温度控制器实现玻璃箱101内模拟体液的温度控制,可以模拟的恒温体液环境温度范围为30℃-48℃针对一般的宠物及人体温度,一般温度波动范围在±0.5℃以内;控制系统106与电磁阀109采用通信连接,通过电磁阀109的开闭将不同体液注入和流出玻璃箱101;
聚醚醚酮人工脊柱融合器布置在夹具模块6中的下聚缩醛块602和上聚缩醛块604共同构成的空腔中,在压缩运动模块5中的连杆506带动齿轮轴501沿其轴向运动进而实现夹具6的打开与闭合运动,从而对融合器进行压缩疲劳实验。
压缩运动模块5中,假设伺服电机505的输出角速度为ω=1.26rad/s,偏心轮504的半径为R=0.1m,偏心距为
①式中,x和t表示上聚缩醛块604的位移和时间,λ为偏心轮504的偏心距与连杆506长度之比,即
将上聚缩醛块604的运动位移方程1对时间取一阶导数,得到上聚缩醛块604的速度方程表达式:
②式中,
将上聚缩醛块604的运动位移方程1对时间取二阶导数,可以得到上聚缩醛块604的加速度方程表达式:
③式中,
在体液模拟模块1中放置的恒温生理盐水的主要成分及离子浓度含量的要求如下:
Na
生理盐水PH值为7.4,模拟的恒温体液环境温度范围为30℃-48℃针对一般的宠物及人体温度,温度波动范围在±0.5℃以内;
在体液模拟模块1中还设置有控制系统106、温度控制器105、电磁阀109;二者采用通信连接,通过温度控制器实现玻璃箱101内模拟体液的温度控制,控制系统106与电磁阀109采用通信连接,通过电磁阀109的开闭将不同体液注入和流出玻璃箱101。
体液模拟模块1具体由以下部分构成:玻璃箱101、底座102、法兰103、锁紧开关104、电磁阀109、内螺纹杆107、外螺纹杆108、温度控制器105和控制系统106;其中:玻璃箱101是整个体液模拟模块1的安装基础;底座102与玻璃箱101连接,外螺纹杆108通过法兰102与底座102连接,内螺纹杆107与外螺纹杆108配合连接;用于实现内螺纹杆107与外螺纹杆108二者之间螺纹副的运动和固定的锁紧开关104布置在外螺纹杆108上(并能够在必要时与内螺纹杆107实现干涉);内螺纹杆107与外螺纹杆108通过锁紧开关104的开闭实现螺纹副的运动和固定;
通过内螺纹杆107调节夹具模块6的开口大小,以适应不同高度的人工融合器疲劳测试实验。
扭转驱动模块4具体构成如下:伺服电机401、齿轮电动拨叉402、齿轮轴403、齿轮404和联轴器405;其中:
伺服电机401通过齿轮轴403带动齿轮404往复转动,通过齿轮拨叉402控制齿轮404与压缩驱动模块5中的齿轮503啮合,带动齿轮轴501往复转动,从而带动夹具6实现融合器的扭转疲劳测试;齿轮404能够在拨叉402的控制下在齿轮轴403上滑移;
伺服电机401通过联轴器405与齿轮轴403连接,齿轮404与齿轮轴403采用平键连接,齿轮电动拨叉402通过上下移动实现齿轮404与压缩驱动模块5中的齿轮503啮合与脱离;
体液模拟模块1中还设置有控制系统106,伺服电机401与控制系统106采用通信连接,控制系统106给予伺服电机401的正反转,正反旋转交替频率为5Hz,旋转角度范围为±10°,伺服电机401正反转角度变化曲线如图9;
控制系统106与电磁阀109、温度控制系统108、步进电机401、伺服电机505、连杆电动拨叉507、齿轮电动拨叉402、扭矩传感器502和压力传感器508采用通信连接。
直齿轮404与直齿轮503的齿数比为1:2;伺服电机401的扭转运动通过直齿轮404传递给直齿轮503,直齿轮503的扭转运动依次通过齿轮轴501、法兰A2、上夹板603传递给上聚缩醛块604,上聚缩醛块604通过空腔结构将扭转动作施加在空腔内的人工融合器上,实现了人工融合器的扭转疲劳测试。
所述聚醚醚酮人工脊柱融合器扭矩疲劳测试方法还满足下述要求之一或其组合:
其一,控制系统106首先控制连杆电动拨叉507的动作调整使连杆506与齿轮轴501脱离,然后通过控制齿轮电动拨叉402的动作调整使齿轮404与齿轮503啮合,同时启动伺服电机401输出正反转运动;伺服电机401的扭转运动通过直齿轮404传递给直齿轮503,直齿轮503的扭转运动依次通过齿轮轴501、法兰A2、上夹板603传递给上聚缩醛块604,上聚缩醛块604通过空腔结构将扭转动作施加在空腔内的人工融合器上,实现了人工融合器的扭转疲劳测试;
所述聚醚醚酮人工脊柱融合器压缩疲劳测试方法中,控制系统106首先使伺服电机401停止,通过控制齿轮电动拨叉402的动作调整使齿轮404与齿轮503脱离啮合,通过控制连杆电动拨叉507的动作调整使连杆506与齿轮轴501连接,同时启动步进电机505输出恒定转速,步进电机505的转动运动依次通过偏心轮504、连杆506、齿轮轴501、法兰A2、上夹板603传递给上聚缩醛块604,上聚缩醛块604通过空腔结构将上下直线移动动作施加在空腔内的人工融合器上,实现了人工融合器的压缩疲劳测试;
其二,下聚缩醛块602顶部和上聚缩醛块604底部分别开有长方形的空腔,下聚缩醛块602和上聚缩醛块604空腔尺寸由对应的人工融合器尺寸确定,下聚缩醛块602和上聚缩醛块604空腔尺寸相同,两者深度之和不超过聚醚醚酮人工脊柱融合器605高度三分之二,空腔宽度和长度尺寸与融合器605的宽度和长度相同,两者在长度和宽度方向上属于过盈配合,融合器605装夹在下聚缩醛块602和上聚缩醛块604之间的空腔内,下聚缩醛块602与下夹板601随着内螺纹杆107和外螺纹杆108二者之间螺纹副的相对运动实现人工融合器在空腔结构内的夹紧;融合器605和下聚缩醛块602一起通过法兰B7,内螺纹107和外螺纹杆108固定在玻璃箱101底部,上聚缩醛块604在压缩驱动模块5作用下上下直线移动运动,上聚缩醛块604空腔底部压缩载荷作用在融合器605顶部,实现人工融合器的压缩疲劳实验;上聚缩醛块604在扭转驱动模块4作用下扭转往复运动,上聚缩醛块604空腔内壁的扭转剪切载荷作用在融合器605侧面上,实现人工融合器605的扭转疲劳实验。
本实施例能同时满足人体体液环境下聚醚醚酮人工脊柱融合器产品的压缩和扭转疲劳测试,产生的扭矩和压缩载荷具有柔性冲击,大大减少了刚性冲击造成惯性载荷的影响,具有测试精度高,适用范围广等优点。
本实施例在现有技术基础上实现了实验方法的综合优化,具有较好的前瞻性和可操作性,完善了相关技术领域。其具有可预期的较为巨大的经济价值和社会价值。
实施例2
聚醚醚酮人工脊柱融合器疲劳测试装置,其构成如下:体液模拟模块1、法兰A2、电机底座3、扭转驱动模块4、压缩驱动模块5、夹具模块6和法兰B7;其中:夹具模块6通过法兰B7与体液模拟模块1连接,夹具模块6通过法兰A2与压缩驱动模块5连接,所述扭转驱动模块4与压缩驱动模块5通过齿轮啮合连接,所述扭转驱动模块4通过电机底座3与体液模拟模块1连接,夹具模块6通过法兰A2与体液模拟模块1连接;
所述夹具模块6的结构构成如下:下夹板601、下聚缩醛块602、上夹板603、上聚缩醛块604;其中:下夹板601、下聚缩醛块602通过螺栓固定连接为一体,下夹板601通过法兰B7与内螺纹杆107连接,上夹板603、上聚缩醛块604通过螺栓固定连接为一体,上夹板603通过法兰A2与齿轮轴501连接;下聚缩醛块602、上聚缩醛块604配合构成能够放置聚醚醚酮人工脊柱融合器605的空腔结构;
下聚缩醛块602顶部和上聚缩醛块604底部分别开有用于放置实验件即聚醚醚酮人工脊柱融合器的主体部分主要轮廓形状为长方体的空腔,下聚缩醛块602和上聚缩醛块604空腔尺寸由对应的人工融合器尺寸确定,下聚缩醛块602和上聚缩醛块604空腔尺寸相同,两者上的空腔深度之和不超过聚醚醚酮人工脊柱融合器605高度三分之二;用于放置聚醚醚酮人工脊柱融合器605的空腔结构宽度和长度尺寸与融合器605的宽度和长度相同,两者在长度和宽度方向上属于过盈配合,融合器605装夹在下聚缩醛块602和上聚缩醛块604之间的空腔内,下聚缩醛块602与下夹板601随着内螺纹杆107和外螺纹杆108二者之间螺纹副的相对运动实现人工融合器在空腔结构内的夹紧;(以保证在针对聚醚醚酮人工脊柱融合器进行压缩实验的过程中,下聚缩醛块602和上聚缩醛块604分别与聚醚醚酮人工脊柱融合器605结合紧密,以便能够实施压缩或/和扭转实验;)融合器605和下聚缩醛块602一起通过法兰B7,内螺纹107和外螺纹杆108固定在玻璃箱101底部,上聚缩醛块604在压缩驱动模块5作用下沿直线上下运动,上聚缩醛块604空腔底部压缩载荷作用在融合器605顶部,实现人工融合器的压缩疲劳实验;上聚缩醛块604在扭转驱动模块4作用下扭转往复运动,上聚缩醛块604空腔内壁的扭转剪切载荷作用在融合器605侧面上,实现人工融合器605的扭转疲劳实验;
压缩运动模块5的构成如下:齿轮轴501、扭矩传感器502、齿轮503、偏心轮504、伺服电机505、连杆506、连杆电动拨叉507和测力传感器508;压缩运动模块5主要用于实现夹具6的压缩驱动;扭矩传感器502和测力传感器508均安装在齿轮轴501上;齿轮503和齿轮轴501采用平键周向固定连接,连杆506的其中一端通过转动副与齿轮轴501连接,偏心轮504上的偏心连接点通过转动副与连杆506的另一端连接,电机505与偏心轮504连接,偏心轮504的几何中心与齿轮轴501共线,电机505带动偏心轮504绕着中心转动;
假设伺服电机505的输出角速度为ω=1.26rad/s,偏心轮504的半径为R=0.1m,偏心距为
①式中,x和t表示上聚缩醛块604的位移和时间,λ为偏心轮504的偏心距与连杆506长度之比,即
将上聚缩醛块604的运动位移方程1对时间取一阶导数,得到上聚缩醛块604的速度方程表达式:
②式中,
将上聚缩醛块604的运动位移方程1对时间取二阶导数,可以得到上聚缩醛块604的加速度方程表达式:
③式中,
连杆拨叉507控制连杆506与齿轮轴501的连接与脱离,通过连杆506带动齿轮轴501沿其轴向往复运动,从而实现上聚缩醛块604上下往复运动;
由于下聚缩醛块602通过锁紧开关104固定不动,上聚缩醛块604与下聚缩醛块602之间的空腔结构体积变化,实现人工融合器的压缩疲劳实验;
所述聚醚醚酮人工脊柱融合器疲劳测试装置的要求是:
在体液模拟模块1中放置有恒温生理盐水,用以模拟人体温度、湿度、盐度等生理液体环境;用以实验的聚醚醚酮人工脊柱融合器布置在体液模拟模块1中的恒温生理盐水中;
体液模拟生理盐水的主要成分及离子浓度含量的要求如下:
Na
生理盐水PH值为7.4,控制系统106与温度控制器105采用通信连接,通过温度控制器实现玻璃箱101内模拟体液的温度控制,可以模拟的恒温体液环境温度范围为30℃-48℃针对一般的宠物及人体温度,一般温度波动范围在±0.5℃以内;控制系统106与电磁阀109采用通信连接,通过电磁阀109的开闭将不同体液注入和流出玻璃箱101;
聚醚醚酮人工脊柱融合器布置在夹具模块6中的下聚缩醛块602和上聚缩醛块604共同构成的空腔中,在压缩运动模块5中的连杆506带动齿轮轴501沿其轴向运动进而实现夹具6的打开与闭合运动,从而对融合器进行压缩疲劳实验。
体液模拟模块1具体由以下部分构成:玻璃箱101、底座102、法兰103、锁紧开关104、电磁阀109、内螺纹杆107、外螺纹杆108、温度控制器105和控制系统106;其中:玻璃箱101是整个体液模拟模块1的安装基础;底座102与玻璃箱101连接,外螺纹杆108通过法兰102与底座102连接,内螺纹杆107与外螺纹杆108配合连接;用于实现内螺纹杆107与外螺纹杆108二者之间螺纹副的运动和固定的锁紧开关104布置在外螺纹杆108上(并能够在必要时与内螺纹杆107实现干涉);内螺纹杆107与外螺纹杆108通过锁紧开关104的开闭实现螺纹副的运动和固定;
通过内螺纹杆107调节夹具模块6的开口大小,以适应不同高度的人工融合器疲劳测试实验;
聚醚醚酮人工脊柱融合器疲劳测试装置,其特征在于:扭转驱动模块4具体构成如下:伺服电机401、齿轮电动拨叉402、齿轮轴403、齿轮404和联轴器405;其中:
伺服电机401通过齿轮轴403带动齿轮404往复转动,通过齿轮拨叉402控制齿轮404与压缩驱动模块5中的齿轮503啮合,带动齿轮轴501往复转动,从而带动夹具6实现融合器的扭转疲劳测试;齿轮404能够在拨叉402的控制下在齿轮轴403上滑移;
伺服电机401通过联轴器405与齿轮轴403连接,齿轮404与齿轮轴403采用平键连接,齿轮电动拨叉402通过上下移动实现齿轮404与压缩驱动模块5中的齿轮503啮合与脱离;
体液模拟模块1中还设置有控制系统106,伺服电机401与控制系统106采用通信连接,控制系统106给予伺服电机401的正反转,正反旋转交替频率为5Hz,旋转角度范围为±10°,伺服电机401正反转角度变化曲线如图9;
控制系统106与电磁阀109、温度控制系统108、步进电机401、伺服电机505、连杆电动拨叉507、齿轮电动拨叉402、扭矩传感器502和压力传感器508采用通信连接。
直齿轮404与直齿轮503的齿数比为1:2;伺服电机401的扭转运动通过直齿轮404传递给直齿轮503,直齿轮503的扭转运动依次通过齿轮轴501、法兰A2、上夹板603传递给上聚缩醛块604,上聚缩醛块604通过空腔结构将扭转动作施加在空腔内的人工融合器上,实现了人工融合器的扭转疲劳测试。
所述聚醚醚酮人工脊柱融合器扭矩疲劳测试装置还满足下述要求之一或其组合:
其一,控制系统106首先控制连杆电动拨叉507的动作调整使连杆506与齿轮轴501脱离,然后通过控制齿轮电动拨叉402的动作调整使齿轮404与齿轮503啮合,同时启动伺服电机401输出正反转运动;伺服电机401的扭转运动通过直齿轮404传递给直齿轮503,直齿轮503的扭转运动依次通过齿轮轴501、法兰A2、上夹板603传递给上聚缩醛块604,上聚缩醛块604通过空腔结构将扭转动作施加在空腔内的人工融合器上,实现了人工融合器的扭转疲劳测试;
所述聚醚醚酮人工脊柱融合器压缩疲劳测试方法中,控制系统106首先使伺服电机401停止,通过控制齿轮电动拨叉402的动作调整使齿轮404与齿轮503脱离啮合,通过控制连杆电动拨叉507的动作调整使连杆506与齿轮轴501连接,同时启动步进电机505输出恒定转速,步进电机505的转动运动依次通过偏心轮504、连杆506、齿轮轴501、法兰A2、上夹板603传递给上聚缩醛块604,上聚缩醛块604通过空腔结构将上下直线移动动作施加在空腔内的人工融合器上,实现了人工融合器的压缩疲劳测试;
其二,下聚缩醛块602顶部和上聚缩醛块604底部分别开有长方形的空腔,下聚缩醛块602和上聚缩醛块604空腔尺寸由对应的人工融合器尺寸确定,下聚缩醛块602和上聚缩醛块604空腔尺寸相同,两者深度之和不超过聚醚醚酮人工脊柱融合器605高度三分之二,空腔宽度和长度尺寸与融合器605的宽度和长度相同,两者在长度和宽度方向上属于过盈配合,融合器605装夹在下聚缩醛块602和上聚缩醛块604之间的空腔内,下聚缩醛块602与下夹板601随着内螺纹杆107和外螺纹杆108二者之间螺纹副的相对运动实现人工融合器在空腔结构内的夹紧;融合器605和下聚缩醛块602一起通过法兰B7,内螺纹107和外螺纹杆108固定在玻璃箱101底部,上聚缩醛块604在压缩驱动模块5作用下上下直线移动运动,上聚缩醛块604空腔底部压缩载荷作用在融合器605顶部,实现人工融合器的压缩疲劳实验;上聚缩醛块604在扭转驱动模块4作用下扭转往复运动,上聚缩醛块604空腔内壁的扭转剪切载荷作用在融合器605侧面上,实现人工融合器605的扭转疲劳实验。
本实施例能同时满足人体体液环境下聚醚醚酮人工脊柱融合器产品的压缩和扭转疲劳测试,产生的扭矩和压缩载荷具有柔性冲击,大大减少了刚性冲击造成惯性载荷的影响,具有测试精度高,适用范围广等优点。
本实施例在现有技术基础上实现了实验方法的综合优化,具有较好的前瞻性和可操作性,完善了相关技术领域。其具有可预期的较为巨大的经济价值和社会价值。
- 聚醚醚酮人工脊柱融合器疲劳测试方法及疲劳测试装置
- 用于叶片疲劳测试的具有最大化移动质量比的共振发生装置和使用该共振发生装置的疲劳测试方法