一种单电机二自由度追光式太阳能热收集器及其集热方法
文献发布时间:2023-06-19 10:24:22
技术领域
本发明属于太阳能集热技术领域,具体涉及一种单电机二自由度追光式太阳能热收集器及其集热方法。
背景技术
在一天之中的不同时间,太阳所在仰角和方位角均是不同的。若是太阳能热收集器的位置固定,太阳能热收集器所接受的阳光辐射就有限的,导致太阳能热收集器的集热效率也比较少。这就需要太阳能热收集器具有追光功能,能够根据太阳所在天空中的仰角和方位角不同,调整太阳能热收集器的仰角的方位角,使太阳能热收集器始终正对太阳。目前的具有多自由度追光能力太阳能热收集器,需要两个或两个以上电机协同工作或需要使用电机配合离合器进行工作,设备复杂,不够便捷,不能仅使用一个电机作为动力源,实现根据太阳所在天空中的仰角和方位角,实时调整太阳能热收集器的仰角和方位角。因此,需要设计一种通过单动力元件驱动的二自由度追光能够显著降低太阳能集热设备的成本,提高集热效率。
发明内容
本发明的目的在于提供一种单电机二自由度追光式太阳能热收集器及其集热方法。
本发明一种单电机二自由度追光式太阳能热收集器,包括底座、周转盘、中心转轴、俯仰传动组件和太阳能集热板。所述周转盘安装在底座上,且与底座通过单向锁止机构构成单向转动的转动副。中心转轴与周转盘之间通过单向锁止机构构成单向转动的转动副。周转盘相对于底座允许转动的方向与中心转轴相对于周转盘允许转动的方向相反。在该结构下,中心转轴正转时带动周转盘一同转动,反转时单独转动,周转盘保持锁止;中心转轴由驱动电机驱动旋转。太阳能集热板的一侧边缘与周转盘铰接。太阳能集热板与中心转轴通过俯仰传动组件连接。俯仰传动组件将中心转轴相对于周转盘的单向转动转换为太阳能集热板的往复翻转运动。
作为优选,所述的周转盘与底座之间允许相对转动的方向,根据太阳在一天中相对于底座的方位角变化情况来确定,使得周转盘相对于底座允许转动的方向与太阳在一天中方位角变化的方向一致。
作为优选,所述的周转盘与底座之间的单向锁止机构为第一棘轮棘爪机构;所述的中心转轴与周转盘之间的单向锁止机构为第二棘轮棘爪机构。
作为优选,所述的第一棘轮棘爪机构包括第一棘爪、复位板簧和第一棘轮。第一棘轮采用端面棘轮。多个第一棘爪沿着周转盘的周向均匀分布。各第一棘爪的内端均与底座铰接,外端抵住第一棘轮上的棘齿圈。各第一棘爪的下侧均设置有复位板簧,所述的复位板簧呈片状弧形,提供第一棘爪抵住第一棘轮棘齿圈的弹力。
所述的第二棘轮棘爪机构包括轴套、第二棘轮、第二棘爪和弹簧。轴套与中心转轴固定;第二棘轮固定在周转盘的中心孔内。第二棘轮采用内棘轮。多个第二棘爪沿着轴套外侧面的周向均布。各第二棘爪的内端均与轴套铰接,外端均抵住第二棘轮内侧的棘齿圈。各第二棘爪与轴套之间均安装有弹簧。
作为优选,所述的周转盘、底座之间的单向锁止机构,以及中心转轴与周转盘之间的单向锁止机构均采用单向轴承。
作为优选,所述的俯仰传动组件包括锥齿轮机构、连接杆和曲轴;曲轴支承在周转盘的顶部。曲轴的转动轴线与太阳能集热板、周转盘之间的铰接轴线平行。锥齿轮机构包括第一锥齿轮和第二锥齿轮。第一锥齿轮、第二锥齿轮与中心转轴的顶端、曲轴的中部分别固定。第一锥齿轮与第二锥齿轮啮合;曲轴上设置有一个或多个作为曲柄的曲轴轴颈。连接杆的一端与曲轴上的曲轴轴颈构成转动副。连接杆的另一端均与太阳能集热板的背面构成转动副。
作为优选,所述的俯仰传动组件包括凸轮轴、凸轮、锥齿轮机构;凸轮轴支承在周转盘上。凸轮固定在凸轮轴上。凸轮的工作轮廓抵住太阳能集热板的背面。
作为优选,所述的太阳能集热板上安装有追光检测模块。所述的追光检测模块包括基板、四个光强度传感器和两块遮光板。基板与太阳能集热板固定。基板与太阳能集热板的正面保持平行。两块遮光板呈十字交叉状设置在基板上;两个遮光板均垂直于基板,并将基板分隔为相互独立的四个检测位。四个光强度传感器分别安装在四个检测位中。其中一块遮光板垂直于太阳能集热板的翻转方向。另一块遮光板平行于太阳能集热板的翻转方向。
作为优选,所述的光强度传感器采用光敏电阻。
作为优选,所述周转盘与底座之间设置有推力轴承;周转盘的转动轴线竖直设置。中心转轴与周转盘同轴设置。
该单电机二自由度追光式太阳能热收集器的集热方法,具体包括以下步骤。
太阳能集热板在太阳光的照射下进行热能收集。四个光强度传感器周期性检测光强度;每次检测后均计算所得四个光强度的极差;若所得极差小于阈值,则不进行追光;若所得极差大于或等于阈值,则进行追光;追光的具体过程包括以下三个步骤。
①.将追光检测模块内两块遮光板分为纵向遮光板和横向遮光板;纵向遮光板垂直于太阳能集热板的相对于周转盘的翻转轴线。横向遮光板平行于太阳能集热板的相对于周转盘的翻转轴线。
②.用纵向遮光板将四个光强度传感器分为两组;每组光强度传感器均为两个光强度传感器。持续检测和计算方位光强差;方位光强差为纵向遮光板分隔开的该两组光强度传感器检测到的光强度的差值。若计算出的该差值大于或等于阈值,则驱动电机正转,使得中心转轴带动周转盘旋转,直到方位光强差小于阈值时,驱动电机停转。
③.用横向遮光板将四个光强度传感器分为两组;每组光强度传感器均为两个光强度传感器。持续检测和计算俯仰光强差;俯仰光强差为横向遮光板分隔开的该两组光强度传感器检测到的光强度的差值;若计算出的该差值大于或等于阈值,则驱动电机反转,使得中心转轴带动曲轴转动,该过程中周转盘保持静止;中心转轴的转动带动太阳能集热板进行往复俯仰转动,直到俯仰光强差小于阈值时,驱动电机停转。
本发明具有的有益效果。
1、本发明利用两个转动方向相反的单向转动副,配合驱动电机的正反转,在仅使用一个驱动电机作为动力源的情况下,利用驱动电机的正转、反转分别实现对太阳能集热板的方位角、仰角的调整,使太阳能集热板始终正对太阳,太阳光能始终直射太阳能集热板,使太阳能集热板的集热效率始终处于最大值,增大了太阳能集热板的总集热量;由于只用一个驱动电机作为动力源,使本发明结构较简单,耗电量较少。
2、本发明根据太阳一天中的位置变化方向,来确定周转盘的允许转动方向,从而可以通过周转盘的小幅度转动就实现在一天中的持续方位角追光,避免周转盘每次调节方位角时都需要先远离太阳所在方向一侧的问题出现。
3、本发明的复位板簧能支撑端面棘轮的棘爪,使棘爪紧贴端面棘轮的勾槽;复位板簧还能间接通过支撑棘爪,对周转盘起支撑作用,使周转盘更稳固,从而使本发明在工作时更加稳固;沿底座周向均匀分布的第一棘轮棘爪机构的第一棘爪能够使端面棘轮均匀受力,减小周转盘受力不均匀现象,从而使周转盘带动太阳能集热板追光更稳定,使太阳能集热板更稳定的接收太阳能。
4、本发明曲轴的连杆轴颈对称分布,使得连杆轴颈通过连接杆对太阳能集热板的支撑力也对称,有助于减小太阳能集热板受力不均的现象,从而使本发明在工作时,受力更加均匀。
5、本发明中周转盘在其中一个转向上受到第二棘轮棘爪机构的刚性锁止,在另一个转向上,受到第一棘轮棘爪机构中的复位板簧、第二棘轮棘爪机构中的弹簧提供的阻碍转矩,故本发明中的周转盘在不受到中心转轴驱动时能够保持稳定,从而避免周转盘在外界环境的干扰下自行转动。
附图说明
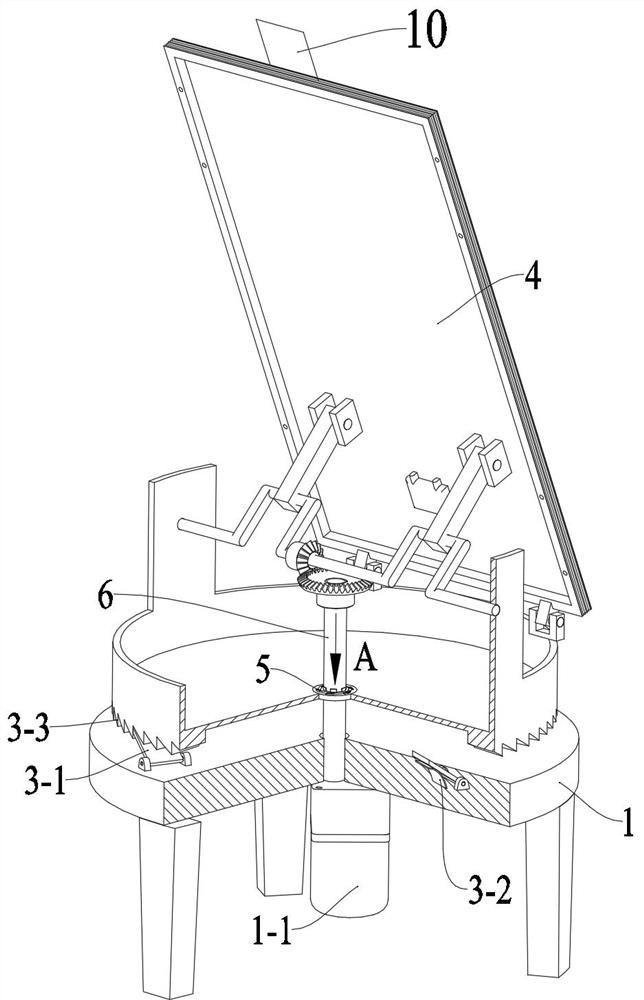
图1为本发明的整体结构示意图。
图2为本发明的局部剖视图。
图3为本发明中第二棘轮棘爪机构的示意图(图2中A向局部视图)。
图4为本发明的太阳能集热板达到第一个俯仰极限位置的示意图。
图5为本发明的太阳能集热板达到第二个俯仰极限位置的示意图。
图6为本发明中追光检测模块的示意图。
具体实施方式
以下结合附图对本发明作进一步说明。
实施例1
如图1和2所示,一种单电机二自由度追光式太阳能热收集器,包括底座1、驱动电机1-1、周转盘2、第一棘轮棘爪机构3、第二棘轮棘爪机构5、中心转轴6、俯仰传动组件、太阳能集热板4、追光检测模块10和控制器。驱动电机1-1通过电机驱动器连接到控制器。追光检测模块10内的光强度传感器连接到控制器。
所述周转盘2安装在底座1的上方,且与底座1通过推力轴承构成公共轴线竖直设置的转动副。周转盘2与底座1之间设置第一棘轮棘爪机构3,使得周转盘2与底座1只能沿一个方向转动。竖直设置的中心转轴6与底座1通过轴承构成转动副;中心转轴6与周转盘2同轴设置。所述的中心转轴6与周转盘2之间通过第二棘轮棘爪机构5连接,使得中心转轴6与周转盘2只能沿单个方向转动。周转盘2相对于底座1的相对转动方向与中心转轴6相对于周转盘2的相对转动方向相反。驱动电机1-1固定在底座1底部,驱动电机1-1的主轴与中心转轴6的底端固连,从而能够驱动中心转轴6旋转。太阳能集热板4的下侧边缘与周转盘2顶部的边缘处通过铰接座铰接。太阳能集热板4的中部通过俯仰传动组件与中心转轴6连接。太阳能集热板4由玻璃板经粘接剂粘接成的玻璃盒和盒内的深色吸热材料所构成。玻璃盒上有进水和出水接管以便于进水和出水,从而实现太阳热能的收集和转移。
如图1和2所示,所述的第一棘轮棘爪机构3包括第一棘爪3-1、复位板簧3-2和第一棘轮3-3。第一棘轮3-3采用端面棘轮,在本实施例中与周转盘2的底部一体成型。多个第一棘爪3-1沿着周转盘2的周向均匀分布。各第一棘爪3-1的内端均与底座1铰接,外端抵住第一棘轮3-3上的棘齿圈。各第一棘爪3-1的下侧均设置有复位板簧3-2,所述的复位板簧3-2呈片状弧形,复位板簧3-2的材料为弹簧钢。第一棘轮3-3在第一棘爪3-1的限制下仅能够相对于周转盘2单向转动。工作时,复位板簧3-2能支撑端面棘轮的第一棘爪3-1,使第一棘爪3-1的外端紧贴第一棘轮3-3棘齿圈上的勾槽;复位板簧3-2还能间接通过支撑第一棘爪3-1,对周转盘2起支撑作用,使周转盘2更稳固,从而使本发明在工作时更加稳固。此外,沿底座1周向均匀分布的各第一棘爪3-1能够使第一棘轮3-3均匀受力,减小周转盘2受力不均匀现象,从而使周转盘2带动太阳能集热板4追光更稳定,使太阳能集热板4更稳定的接收太阳能。
如图2和3所示,第二棘轮棘爪机构5包括轴套5-1、第二棘轮5-2、第二棘爪5-3和弹簧5-4。轴套5-1与中心转轴6通过花键连接;第二棘轮5-2固定在周转盘2的中心孔内。第二棘轮5-2的棘齿圈位于自身的中心孔内。多个第二棘爪5-3沿着轴套5-1外侧面的周向均布。各第二棘爪5-3的内端均与轴套5-1铰接,外端均抵住第二棘轮5-2内侧的棘齿圈。各第二棘爪5-3与轴套5-1之间均安装有弹簧5-4;弹簧5-4采用压簧,为第二棘爪5-3提供抵住第二棘轮5-2内侧的棘齿圈的弹力。第二棘轮5-2在第二棘爪5-3的限制下仅能够相对于中心转轴6单向转动。
如图4和5所示,俯仰传动组件包括锥齿轮机构7、连接杆8和曲轴9;周转盘2顶部的两侧固定有两个竖支架。曲轴9的两端分别通过轴承转动连接在两个竖支架上(图中省略轴承)。曲轴9的转动轴线与太阳能集热板4、周转盘2之间的铰接轴线平行。锥齿轮机构7包括第一锥齿轮和第二锥齿轮。第一锥齿轮、第二锥齿轮与中心转轴6的顶端、曲轴9的中部分别固定。第一锥齿轮与第二锥齿轮啮合;从而将中心转轴6与周转盘2的相对转动传递到曲轴9上,带动曲轴9相对于周转盘2旋转。曲轴9上对中设置有两个作为曲柄的曲轴轴颈9-1。两根连接杆8的一端与曲轴9上的两个曲轴轴颈9-1分别构成转动副。两根连接杆8的另一端均与太阳能集热板4的背面中部构成转动副。从而可以通过曲轴9的转动来带动太阳能集热板4的俯仰运动。由于曲轴9的曲轴轴颈9-1对称分布,使得曲轴轴颈9-1通过连接杆8对太阳能集热板4的支撑力也对称,有助于减小太阳能集热板4受力不均的现象,从而使单电机二自由度追光式太阳能热收集器在工作时,受力更加均匀。
如图6所示,追光检测模块10包括基板10-1、四个光强度传感器10-2和两块遮光板10-3。光强度传感器10-2采用光敏电阻。基板10-1固定在太阳能集热板4的正面的顶部。基板10-1与太阳能集热板4的正面保持平行。两块遮光板10-3呈十字交叉状设置在基板10-1上;两个遮光板10-3均垂直于基板10-1,并将基板10-1分隔为相互独立的四个检测位。四个光强度传感器10-2分别安装在四个检测位中。其中一块遮光板10-3垂直于太阳能集热板4的翻转方向。另一块遮光板10-3平行于太阳能集热板4的翻转方向。当太阳能集热板4正对光源时,四个光强度传感器10-2均未被遮挡,能够检测到相近的光强度。当太阳能集热板4未正对光源时,则部分光强度传感器10-2会被遮光板10-3遮挡住,从而导致四个光强度传感器10-2检测到光强度有较大差异。根据这一特点即可确认当前是否实现追光。
作为一种优选的技术方案,根据太阳在一天中相对于该太阳能热收集器的方位角变化情况来确定,周转盘2与底座1之间允许相对转动的方向,使得周转盘2相对于底座1允许转动的方向与太阳在一天中方位角变化一致。从而可以通过周转盘2的小幅度转动就实现在一天中的持续方位角追光,避免周转盘2每次调节方位角时都需要先远离太阳所在方向一侧的问题出现。具体来说,若该太阳能热收集器安装在地球的太阳光直射点以北,则周转盘2的允许转动方向为从上向下看的逆时针方向(符合太阳一天中早上在东南方向,中午在正南方向,晚上在西南方向的方位角变化规律);若该太阳能热收集器安装在地球的太阳光直射点以南,则周转盘2的允许转动方向为从上向下看的顺时针方向(符合太阳一天中早上在东被方向,中午在正北方向,晚上在西北方向的方位角变化规律)。
本发明中驱动电机1-1通过正转和反转来分别实现太阳能集热板4方位角和俯仰角的调节。
当驱动电机1-1正转时,驱动电机1-1的主轴带动中心转轴6顺时针旋转;该转动方向下,中心转轴6与周转盘2之间无法相对转动,周转盘2与底座1之间能够相对转动,故中心转轴6通过第二棘轮棘爪机构5带动周转盘2一同进行顺时针旋转;周转盘2带动太阳能集热板4一同绕竖直轴线转动,实现太阳能集热板4方位角的调节;从而实现太阳能集热板4改变方位角追太阳光的功能。
当驱动电机1-1反转时,驱动电机1-1的主轴带动中心转轴6逆时针旋转;该转动方向下,中心转轴6与周转盘2之间能够相对转动,周转盘2与底座1之间无法相对转动;故此时周转盘2保持静止,中心转轴6相对于周转盘2转动,通过锥齿轮机构7带动曲轴9转动,曲轴9的曲轴轴颈9-1通过连接杆8带动太阳能集热板4绕水平轴线转动,改变太阳能集热板4的俯仰角;使太阳能集热板4的仰角与太阳所在仰角保持相同,从而有助于增大太阳能集热板4的集热效率。
可以看出,本发明仅使用一个驱动电机1-1作为动力源就能够根据太阳所在天空中的仰角和方位角,实时调整太阳能集热板4的仰角和方位角,使太阳能集热板4始终正对太阳,太阳光能始终直射太阳能集热板4,使太阳能集热板4的集热效率始终处于最大值,增大了太阳能集热板4的总集热量;由于只用一个驱动电机1-1作为动力源,使本发明结构较简单,成本低廉,耗电量较少。
该单电机二自由度追光式太阳能热收集器的集热方法,具体包括以下步骤。
太阳能集热板4在太阳光的照射下进行集热。四个光强度传感器10-2周期性检测光强度;每次检测后均计算所得四个光强度的极差(即最大值与最小值之间的差值);若所得极差小于阈值,则不进行追光;若所得极差大于或等于阈值,则进行追光;追光的具体过程包括以下三个步骤。
①.将追光检测模块10内两块遮光板10-3分为纵向遮光板10-3和横向遮光板10-3;纵向遮光板10-3垂直于水平面;横向遮光板10-3平行于太阳能集热板4的相对于周转盘2的翻转轴线。
②.用纵向遮光板10-3将四个光强度传感器10-2分为两组;每组光强度传感器10-2均为两个光强度传感器10-2。持续检测和计算方位光强差;方位光强差为纵向遮光板10-3分隔开的该两组光强度传感器10-2检测到的光强度的差值;一组光强度传感器10-2检测到的光强度是该组内的两个光强度传感器10-2检测到的光强度的平均值。若计算出的该差值大于或等于阈值,则驱动电机1-1正转,使得中心转轴6带动周转盘2旋转,直到方位光强差小于阈值时,驱动电机停转,此时,太阳能集热板在方位角上正对太阳。
③.用横向遮光板10-3将四个光强度传感器10-2分为两组;每组光强度传感器10-2均为两个光强度传感器10-2。持续检测和计算俯仰光强差;俯仰光强差为横向遮光板10-3分隔开的该两组光强度传感器10-2检测到的光强度的差值;若计算出的该差值大于或等于阈值,则驱动电机1-1反转,使得中心转轴6带动曲轴9转动,该过程中周转盘2保持静止;曲轴9带动太阳能进行周期性俯仰转动,直到俯仰光强差小于阈值时,驱动电机停转,此时,太阳能集热板在俯仰角上正对太阳。实现太阳能集热板正对太阳,使得集热效率达到最大。
实施例2
本实施例与实施例1的区别在于:使用两个单向轴承来分别替代第一棘轮棘爪机构3、第二棘轮棘爪机构5;从而能够实现驱动电机正反转分别实现太阳能集热板俯仰角方位角的调节。
实施例3
本实施例与实施例1的区别在于:驱动电机与中心转轴之间增设一个减速器,依次来进一步提高追光的精度。
实施例4
本实施例与实施例1的区别在于:俯仰传动组件不同。
本实施例中的俯仰传动组件包括凸轮轴、凸轮、锥齿轮机构7;凸轮轴支承在周转盘2顶部的两个竖支架上。凸轮固定在凸轮轴上。凸轮的工作轮廓抵住太阳能集热板的背面;通过凸轮的转动来调节太阳能集热板的俯仰角。
- 一种单电机二自由度追光式太阳能热收集器及其集热方法
- 一种单电机二自由度追光式太阳能热收集器及其集热方法