用于运行机动车的方法、控制器、机动车
文献发布时间:2023-06-19 10:27:30
技术领域
本发明涉及一种用于运行机动车的方法,该机动车具有驱动组件、摩擦制动系统和调节元件,驱动组件具有电驱动机,摩擦制动系统尤其是液压式摩擦制动系统,其中,调节元件能够在第一终态与第二终态之间尤其以无级的方式移位,其中,调节元件在第一终态中的位态对应于0%的百分比值,调节元件在第二终态中的位态对应于100%的百分比值,其中,当调节元件的位态具有大于预给定的阈值的百分比值时,预给定用于机动车的加速扭矩,并且其中,当调节元件的位态具有小于该阈值的百分比值时,预给定用于机动车的减速扭矩。
此外,本发明涉及一种用于执行上述方法的控制器。
此外,本发明涉及一种具有上述控制器的机动车。
背景技术
现有技术已公开开篇提到的类型的方法和机动车。为了确保机动车的可靠的减速,这些机动车通常具有摩擦制动系统。此外,混合动力车辆和电动车辆分别具有驱动组件,该驱动组件具有至少一个电驱动机。
此外,混合动力车辆和电动车辆越来越多地具有调节元件、例如加速踏板,其具有所谓的单踏板功能(Ein-Pedal-Funktion)。这样的调节元件通常能够在第一终态与第二终态之间移位,其中,调节元件在第一终态中的位态对应于0%的百分比值,调节元件在第二终态中的位态对应于100%的百分比值。在此,在具有单踏板功能的调节元件的情况下,当调节元件的位态具有大于预给定的阈值的百分比值时,预给定用于机动车的加速扭矩,并且当调节元件的位态具有小于预给定的阈值的百分比值时,预给定减速扭矩。
发明内容
根据本发明的、具有权利要求1的特征的方法具有以下优点:即使在机动车相对于地面的相对速度小时,通过本方法也能够提供足够的用于使机动车减速的减速扭矩。根据本发明,为此设置有:操控摩擦制动系统,用以产生减速扭矩,从而使得摩擦制动系统至少部分地、尤其是完全地产生预给定的减速扭矩。即,摩擦制动系统要么单独地、要么与机动车的至少一个别的设备相结合地产生预给定的减速扭矩,该设备构造用于产生减速扭矩。
根据一种优选的实施方式设置,发电机式地运行驱动组件的电驱动机,用以产生减速扭矩,从而使得电驱动机至少部分地产生预给定的减速扭矩。由此得到以下优点:通过发电机式地运行电驱动机,以电能的形式回收利用制动能量,由此能够增加机动车的效率。此外,尤其是得到以下优点:使摩擦制动系统减轻负载,由此减小摩擦制动系统的磨损。例如,优选地,只有当例如由于机动车的相对速度低而不能够仅仅通过发电机式地运行电驱动机来确保预给定的减速扭矩时,才操控摩擦制动系统用以产生减速扭矩。
优选地,检测机动车相对于地面的相对速度、尤其是机动车的车身相对于地面的相对速度,并且根据检测到的相对速度改变预给定的减速扭矩。由此得到以下优点:能够单个地调整机动车的减速过程。例如,由此能够实现机动车的以舒适为导向的减速。例如,当检测到超过或者说未超过能够预给定的相对速度时,改变预给定的减速扭矩。在此,尤其预给定多个相对速度,在超过和/或未超过所述相对速度时改变减速扭矩。尤其是,随着相对速度,以无级的方式改变减速扭矩。当除了摩擦制动系统之外还操控至少一个另外的设备(例如电驱动机)用以产生减速扭矩时,优选地,根据相对速度改变减速扭矩的由摩擦制动系统或者至少一个另外的设备产生的百分比份额。例如,在相对速度减小时,增加通过摩擦制动系统产生的百分比份额。
根据一种优选的实施方式设置,当相对速度减小时,减小减速扭矩。由此,在使机动车减速时,能够避免机动车的过度的急抬头运动(Aufbäumbewegung)或者说被认为是干扰的减速抽动,从而确保机动车的舒适的减速或者说舒适的停车(软停止)。
在此,优选设置,预给定第一阈值速度,其中,只有当检测到的相对速度小于第一阈值速度时,才减小减速扭矩。因此,当虽然检测到相对速度减小,但是这个相对速度仍大于第一阈值速度时,至少不减小减速扭矩。由此确保,在机动车的相对速度大于第一阈值速度时,实现机动车的顺利的减速。
根据一种优选的实施方式设置,预给定第二阈值速度,所述第二阈值速度大于第一阈值速度,其中,当检测到大于所述第一阈值速度、小于所述第二阈值速度的相对速度时,在所述相对速度减小时,增加减速扭矩。通过对减速扭矩的这样的预给定,实现机动车的特别顺利的、但是总是仍然舒适的减速或者说停车(积极的软停止)。
优选地,根据先前存储的特性曲线预给定减速扭矩。特性曲线尤其是在初步试验中求取的特性曲线,其根据机动车的检测到的相对速度示出已预给定的或者说待预给定的减速扭矩。由此得到以下优点:能够将适合的用于实现舒适的减速或者说停车的减速扭矩分别配属于机动车的多个相对速度。
优选地,在此,特性曲线具有斜率,随着相对速度减小,斜率变大和/或变小。由此得到以下优点:能够单个地调整机动车的减速过程或者说停车过程。例如,根据选出的行驶模式和/或根据机动车的构造,使用具有不同的斜率和/或斜率变化的特性曲线,在该机动车中执行所述方法。
优选地,通过预给定的减速扭矩将机动车减速到静止状态。对此,本方法特别有利地适合,因为即使在机动车的相对速度小时或者说即使在机动车的静止状态中,通过摩擦制动系统也仍然能够产生制动扭矩,该制动扭矩足以将机动车减速到静止状态或者说将机动车保持在静止状态中。
根据一种优选的实施方式设置,预给定用于减速扭矩的最小值,其中,减速扭矩不被减小得低于最小值。由此,一方面确保,预给定足够的用于将机动车减速、尤其是用于将机动车减速到静止状态的减速扭矩。此外,另一方面确保,在达到静止状态之后,将机动车保持在静止状态中。由于在机动车的静止状态中电驱动机不能够产生发电机式减速扭矩,因此,为了保持机动车,优选仅操控摩擦制动系统。
根据一种优选的实施方式设置,通过摩擦制动系统产生基准减速扭矩,其中,通过马达式地或者发电机式地运行电驱动机至少基本上补偿基准减速扭矩与预给定的减速扭矩之间的差。因此,通过摩擦制动系统产生基准减速扭矩,该基准减速扭矩与预给定的减速扭矩不同,即该基准减速扭矩大于或者小于该预给定的减速扭矩。为了至少基本上补偿、尤其是完全地补偿基准减速扭矩与预给定的减速扭矩之间的差,通过电机产生补偿扭矩。对此,当基准减速扭矩大于预给定的减速扭矩时,马达式地运行电机,并且当基准减速扭矩小于预给定的减速扭矩时,发电机式地运行电机。由此实现对减速扭矩的特别精确的和快速的控制。尤其是,在相对速度改变时,基准减速扭矩保持恒定,从而使得仅通过改变补偿扭矩实现减速扭矩的预给定的改变。
根据本发明的、具有权利要求12的特征的、用于前述机动车的控制器的突出之处在于,控制器布置用于在常规使用时执行根据本发明的方法。由此得到已经提到的优点。由上述内容以及权利要求得出其他优选的特征和特征组合。
根据本发明的、具有权利要求13的特征的机动车具有驱动组件、摩擦制动系统和调节元件,驱动组件具有电驱动机,其中,调节元件能够在第一终态与第二终态之间尤其以无级的方式移位,其中,调节元件在第一终态中的位态对应于0%的百分比值,调节元件在第二终态中的位态对应于100%的百分比值,并且所述机动车具有根据本发明的控制器。由此也得到已经提到的优点。由上述内容以及权利要求得出其他优选的特征和特征组合。
附图说明
以下,根据绘图更详尽地阐述本发明。为此示出:
图1 机动车的简化示意图,
图2 用于机动车的不同的有利的停车策略的特性曲线的概览,
图3 用于运行机动车的有利的方法。
具体实施方式
图1在简化示意图中示出机动车1。在当前情况下,机动车1具有四个车轮2和3,其中,车轮2配属于前轮轴4,车轮3配属于后轮轴5。此外,机动车1具有驱动组件6,该驱动组件具有能够发电机式运行的电驱动机7。驱动机7通过差动传动器8和轴9、10和11与前轮轴4的车轮2连接,从而使得车轮2能够通过驱动机7驱动。此外,机动车1具有摩擦制动系统12,在当前情况下,该摩擦制动系统具有配属于前轮轴4的车轮2的摩擦制动装置13,其用于产生减速扭矩MV。在当前情况下,摩擦制动装置13能够液压式操纵。替代于此地,摩擦制动系统12具有能够电动马达式或者气动式操纵的摩擦制动装置13。
在图1中示出的机动车1具有调节元件14,该调节元件构造为加速踏板,并且该调节元件能够无级地在第一终态与第二终态之间移位,其中,调节元件14在第一终态中的位态对应于0%的百分比值,调节元件14在第二终态中的位态对应于100%的百分比值。借助于调节元件14,可选地,能够预给定用于机动车1的加速扭矩或者减速扭矩MV。在此,当调节元件14的位态具有大于预给定的阈值的百分比值时,预给定加速扭矩,当调节元件14的位态具有小于预给定的阈值的百分比值时,预给定减速扭矩MV。
为了预给定加速扭矩或者说减速扭矩MV,机动车1具有控制器15,该控制器一方面与调节元件14连接,另一方面与驱动机7并且与摩擦制动装置13连接。当基于调节元件14的位态预给定加速扭矩时,控制器15操控驱动机7,用以产生该加速扭矩。当预给定减速扭矩MV时,控制器14至少操控摩擦制动装置13,用以产生该减速扭矩MV。可选地,控制器15还操控驱动机7,用以产生发电机式减速扭矩MV。
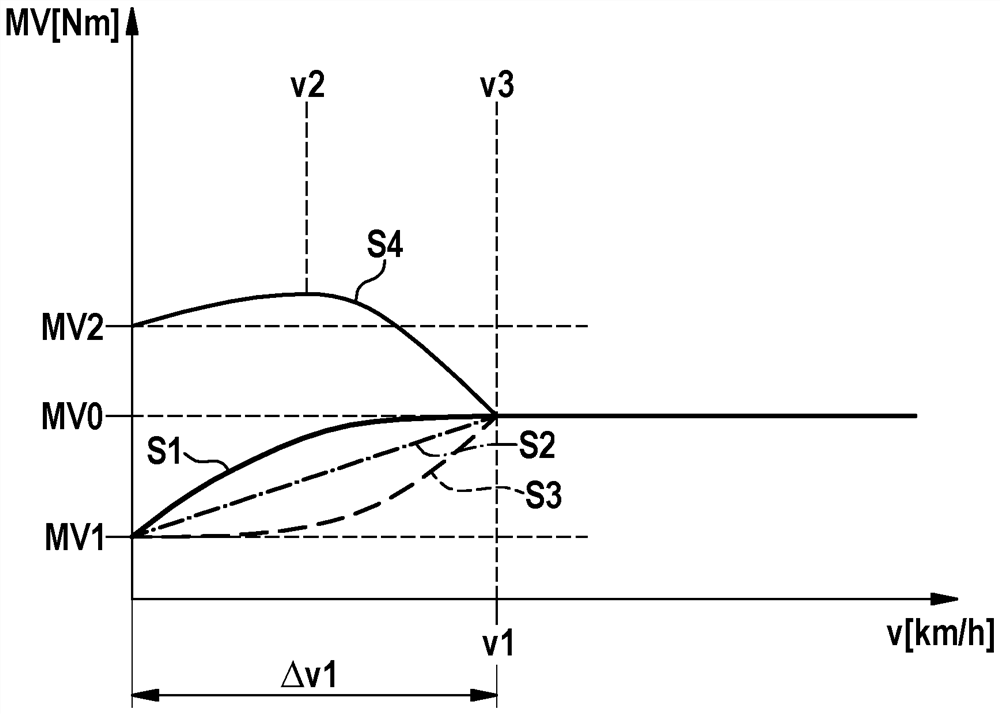
图2示出用于机动车1的不同的有利的减速过程的特性曲线S1、S2、S3和S4。对此,根据机动车1的相对速度v示出减速扭矩MV,当调节元件14的位态具有小于阈值的百分比值时,通过控制器15预给定用于机动车1的该减速扭矩。如图2所示,根据相对速度v改变减速扭矩MV。
根据特性曲线S1、S2和S3,如果相对速度v大于预给定的阈值速度v1,则当机动车1的相对速度v减小时,预给定的减速扭矩MV恒定地保持为值MV0。如果检测的相对速度v小于阈值速度v1,则随着相对速度v减小减速扭矩MV。通过减小减速扭矩MV,实现机动车1的特别舒适的减速,尤其是直到机动车1的静止状态。尤其是,在机动车1停车时,避免减速抽动。如图2所示,减速扭矩不被减小得低于预给定的最小值MV1。由此确保,机动车1在减速直到静止状态之后保持在静止状态中。由于特性曲线S1、S2和S3在具有减小的相对速度的相对速度区域Δv1中分别具有不同的斜率或者说斜率变化,因此,其彼此不同。
根据特性曲线S2,减速扭矩MV线性地随着相对速度v减小。与此不同,随着相对速度v减小,特性曲线S1的斜率变大,随着相对速度v减小,特性曲线S3的斜率变小。
由于除了第一阈值速度v2之外(其中,如果相对速度v小于第一阈值速度v2,则当相对速度v减小时,减速扭矩MV减小),还预给定大于第一阈值速度v2的第二阈值速度v3,并且如果检测到大于第一阈值速度v2、小于第二阈值速度v3的相对速度v,则当相对速度v减小时,增加减速扭矩MV,因此,在图2中示出的特性曲线S4与特性曲线S1、S2和S3不同。通过对减速扭矩MV的这样的预给定,实现机动车1的特别顺利的、但是总是仍然舒适的减速或者说停车。根据特性曲线S4,预给定用于减速扭矩MV的最小值MV2,减速扭矩MV不被减小得低于该最小值。
根据图2,特性曲线S1、S2和S3的第一阈值速度v1对应于特性曲线S4的第二阈值速度v3。但是,在图2中仅示例性地示出阈值速度v1、v2和v3的位置。根据特性曲线S1、S2、S3和S4的另外的实施例,特性曲线S1、S2和S3的第一阈值速度v1与特性曲线S4的第二阈值速度v3不同。
图3示出用于运行机动车1的有利的方法。在第一步骤S1中,检测调节元件14的位态的百分比值。在随后的步骤S2中,当在第一步骤S1中检测到调节元件14的位态的百分比值大于预给定的阈值时,预给定用于机动车1的加速扭矩。
但是,如果在第一步骤S1中检测到调节元件14的位态具有小于阈值的百分比值,则替代步骤S2中的加速扭矩地,在步骤S3中预给定用于机动车1的减速扭矩MV。在此,预给定的减速扭矩MV至少通过机动车1的摩擦制动装置13产生。可选地,附加地还发电机式运行驱动机7,用以产生减速扭矩MV。
在随后的步骤S4中,检测机动车1相对于地面的相对速度v。在当前情况下,机动车1的车身相对于地面的相对速度被检测作为相对速度v。
在随后的步骤S5中,根据检测到的相对速度v来改变基于调节元件14的位态的小于阈值的百分比值为机动车1预给定的减速扭矩MV。例如,根据在图2中示出的特性曲线S1、S2、S3和S4中的一个特性曲线改变预给定的减速扭矩MV。由此分别得出机动车1的特别舒适的减速过程。为了确保改变减速扭矩MV,可选地,改变通过摩擦制动装置13产生的减速扭矩MV、改变通过驱动机7产生的发电机式减速扭矩MV或者不仅改变通过摩擦制动装置13产生的减速扭矩MV、还改变通过驱动机7产生的减速扭矩MV。
由于能够操控摩擦制动装置13用以产生减速扭矩MV,机动车1能够被减速直至静止状态。此外,机动车1能够通过操控摩擦制动装置13保持在静止状态中。
- 用于运行机动车的方法、机动车的控制器及机动车
- 机动车中的控制器、机动车以及用于运行控制器的方法