混凝土拱坝缆机运行轨迹线规划方法
文献发布时间:2023-06-19 10:33:45
技术领域
本发明涉及混凝土拱坝施工技术领域,具体的是一种混凝土拱坝缆机运行轨迹线规划方法。
背景技术
当下的缆机运行过程,主要是通过人工操作控制缆机从装料平台出发,到达仓面卸完料后再返回装料平台,在这个过程中,需要多人拿着对讲机配合完成,其效率低下,且容存在安全隐患。上述过程中,缆机运行过程中常常摆动弧度较大,其摆动较大的原因除了风速等的外界因素的影响,部分原因也是由缆机操作员造成的,如速度控制不当、仓面卸料点未能及时准确定位等。
发明内容
本发明所要解决的技术问题是提供一种混凝土拱坝缆机运行轨迹线规划方法,解决了传统的人为操控缆机运行轨迹所造成的缆机定位不精准问题,为缆机自动运行的实现提供了现实依据。
为解决上述技术问题,本发明所采用的技术方案是:一种混凝土拱坝缆机运行轨迹线规划方法,包括以下步骤:
1)根据混凝土浇筑位置和供料点位置确定缆机的起点和终点,并记录起点的坐标A(x
2)据起点和终点之间各建筑物的高度、缆机横向辐射范围,确定缆机运行时的最高点H(x
3)从直线AB中点H(x
4)直线AB中点H(x
5)记录H的投影点H’;
6)分别取线段AH',H'B,H'C,H'D的终点,记为E,F,G,K,点E,F,G,K的X坐标和Y坐标,由点A,B,C,H',D共同决定,而Z坐标可人为控制;
7)根据所确定的控制点A,B,C,D,E,F,G,H,K的空间坐标值,构造缆机运行曲面;
8)在起点A(x
9)在缆机上安装传感器,实时监测缆机运行路径上的障碍物分布情况;
若监测到前方运行路径上出现障碍物,则传回障碍物所在区域O([x
10)缆机运行系统循环执行上述过程,直到缆机到达终点为止。
优选的方案中,所述的步骤1)中,起点A为缆机装料位置,终点B为缆机卸料位置。
优选的方案中,所述的步骤2)中,高点H(x
优选的方案中,所述的步骤2)中,横向最大范围[R
优选的方案中,所述的步骤5)中,点H’的投影点落在四边形
优选的方案中,所述的步骤7)中,缆机运行曲面构造方法具体如下:
通过调整E,F,G,K的Z坐标,使A,B,C,D,E,F,G,H,K九个点近似分布在一个光滑曲面(半球面)上,以A,B,C,D,E,F,G,H,K九个点的X,Y坐标范围为依据,在XOY平面上构建网格坐标(x
优选的方案中,所述的步骤8)中,改进的迪杰斯特拉算法的改进如下:
通过24邻域搜索代替原迪杰斯特拉算法的坐标点搜寻方式中的逐点搜索,在由24个点构成的邻域中选择下一目标点,然后将剩余23个点全部标记成已被搜索状态。
优选的方案中,所述的24邻域搜索是以当前点为中心,向四周作24条互不重合的射线,在每条射线附近找一点,使其距离中心点最近,从而通过24条射线确定24个点,所确定的24个点构成当前坐标点的邻域。
优选的方案中,所述的步骤9)中,重新按照步骤8)进行缆机路径规划时,改进的迪杰斯特拉算法作避障路径规划过程中,将障碍物所在区域的所有散点坐标默认为已经被搜寻过的点,以此避开障碍物。
本发明所提供的一种混凝土拱坝缆机运行轨迹线规划方法,通过采用上述方法,可精准确定缆机运行的最优线路,并且缆机在该路线上运行时,可实现实时监测路径中的障碍物,在监测到障碍物时提前修改最优运行路径,实现了缆机的自动化运行目的,有效提升了混凝土拱坝施工效率,保障了施工过程中的安全以及精度。
附图说明
下面结合附图和实施例对本发明作进一步说明:
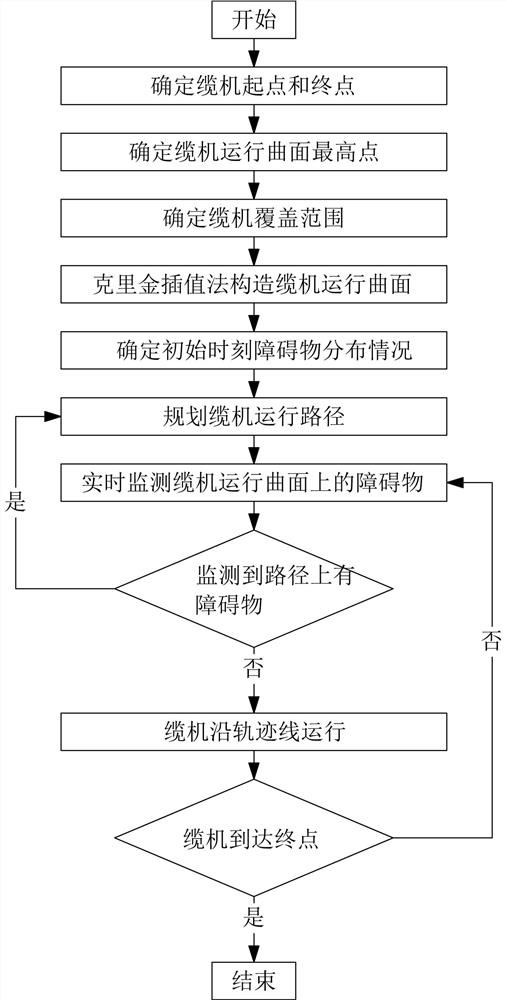
图1为本发明的原理框图。
图2为本发明中缆机运动曲面示意图。
图3为本发明中缆机运动曲面示意图。(含缆机运行起点、终点)
图4为本发明中24邻域构造方法示意图。
图5为本发明中缆机上坝路径规划图。
图6为本发明图5中的XOY平面图。
图7为本发明图5中的XOZ平面图。
图8为本发明图5中的YOZ平面图。
图9为本发明实际工程中的各控制点位置的XOY平面投影图。
图10为本发明实际工程中的各控制点位置的YOZ平面投影图。
图11为本发明实际工程中的各控制点位置的XOZ平面投影图。
图12为本发明实际工程中的各控制点平面相对位置示意图。
具体实施方式
实施例1:
一种混凝土拱坝缆机运行轨迹线规划方法,包括以下步骤:
1)根据混凝土浇筑位置和供料点位置确定缆机的起点和终点,并记录起点的坐标A(x
2)据起点和终点之间各建筑物的高度、缆机横向辐射范围,确定缆机运行时的最高点H(x
3)从直线AB中点H(x
4)直线AB中点H(x
5)记录H的投影点H’;
6)分别取线段AH',H'B,H'C,H'D的终点,记为E,F,G,K;
7)根据所确定的控制点A,B,C,D,E,F,G,H,K的空间坐标值,构造缆机运行曲面;
8)在起点A(x
9)在缆机上安装传感器,实时监测缆机运行路径上的障碍物分布情况;
若监测到前方运行路径上出现障碍物,则传回障碍物所在区域O([x
10)缆机运行系统循环执行上述过程,直到缆机到达终点为止。
优选的方案中,所述的步骤2)中,横向最大范围[R
优选的方案中,所述的步骤5)中,点H’的投影点落在四边形
实施例2:
在实施例1的基础上,所述的步骤7)中,缆机运行曲面构造方法具体如下:
通过调整E,F,G,K的Z坐标,使A,B,C,D,E,F,G,H,K九个点近似分布在一个光滑曲面(半球面)上,以A,B,C,D,E,F,G,H,K九个点的X,Y坐标范围为依据,在XOY平面上构建网格坐标(x
优选的方案中,所述的步骤8)中,迪杰斯特拉算法的改进如下:
通过24邻域搜索代替原迪杰斯特拉算法的坐标点搜寻方式中的逐点搜索,在由24个点构成的邻域中选择下一目标点,然后将剩余23个点全部标记成已被搜索状态。
优选的方案中,所述的24邻域搜索是以当前点为中心,向四周作24条互不重合的射线,在每条射线附近找一点,使其距离中心点最近,从而通过24条射线确定24个点,所确定的24个点构成当前坐标点的邻域。
实施例3:
在实施例1的基础上,以某混凝土拱坝工程为例,在某时间段内:
按照步骤1)所述方法,确定缆机吊罐装料点位置坐标为A(589000m,3013042m,700m),缆机吊罐在施工仓面的卸料点坐标为B(589145m,3012281m,700m)。根据缆机运行起点和终点之间的建筑物的实际高度,确定缆机运行的最高点坐标为H(589073m,30126251m,850m)。
按照步骤2)至步骤6)所述方法,确定各控制点具体坐标,如下表:
控制点空间坐标
上表中各控制点的位置如附图9-12中所示。
根据步骤7)至步骤8),利用控制点生成缆机运行网格曲面S(x
步骤9)中,当有障碍物出现时,在缆机运行曲面上做缆机路径规划。改进的迪杰斯特拉算法的24邻域构造示意图如附图4所示。
上述路径规划结果如下表所示:
表路径规划结果
由上表可见规划的路径中,共由45个坐标点构成,其中起点即为A点,终点即为B点,将上述路径绘制在缆机运行曲面上,效果附图5-8所示(图中阴影区域为障碍物,黑色线段为缆机路径,黑色线段两端分别为缆机运行的起点A和终点B)。
由附图5-8可见,缆机路径规划时,成功绕开障碍物所在区域,且规划的路径比较平滑,符合缆机运动规律。
- 混凝土拱坝缆机运行轨迹线规划方法
- 一种机器人运行轨迹规划装置及方法