一种活动夹爪、搬运机器人及活动夹爪的操作方法
文献发布时间:2023-06-19 10:33:45
技术领域
本发明涉及机械臂制造技术领域,具体涉及一种活动夹爪、搬运机器人及活动夹爪的操作方法。
背景技术
随着科技的进步,制造业逐渐由传统的手工制造朝机械自动化的方向发展,其中,对机器人安装合适的夹爪,其能模仿人的某些动作功能,用以按固定程序抓取、搬运物件或操作工具。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动,它的任务是协助或取代人类的工作,例如生产业、建筑业,或是危险的工作,机器人是高级整合控制论、机械电子、计算机、货物和仿生学的产物,包括家务型、操作型、程控型、数控型、搜救类、平台型和学习控制型等几大类,目前,机器人在工业、医学、农业甚至军事等领域中均等有重要用途。
搬运机器人通过驮举来移载物料,其通常由移动装置和夹爪构成,作业时,移动装置驱动夹爪驮起或降下实现货物的移载。但是现有的搬运夹爪多为固定式,无法实现货物的姿态变化,搬运夹爪也无法在搬运过程中自动化夹紧固定货物,运输夹运稳定性较差,且搬运效率也较低。
发明内容
本发明要解决的技术问题是提供一种能够保证工件运输过程中的稳定、可改变工件姿态,且结构简单、操作灵活的活动夹爪、搬运机器人及活动夹爪的操作方法。
为了解决上述技术问题,本发明提供了一种活动夹爪,包括固定手指和活动手指,所述固定手指和活动手指的相对面上均安装有真空吸盘,所述真空吸盘相对设置,所述活动手指与所述固定手指铰接,第一驱动电机从铰接位置连接所述活动手指,所述第一驱动电机驱动所述活动手指绕所述固定手指旋转任意角度。
进一步的,所述固定手指和活动手指为叉状,包括叉臂和至少两个叉齿,所述叉臂端部通过铰接传动孔铰接,所述真空吸盘安装于所述叉齿端部。
进一步的,所述叉臂为所在平面与所述叉齿所在平面垂直的L型。
进一步的,所述叉齿端部向内折弯有弯折部,所述真空吸盘设置于所述弯折部末端。
本发明还提供了一种搬运机器人,还包括底座、大臂和升降组件,所述大臂一端与所述底座转动连接,所述升降组件与所述大臂另一端转动连接,所述活动夹爪与所述升降组件相连。
进一步的,所述升降组件通过小臂与所述大臂转动连接,所述升降组件固定安装于所述小臂顶部。
进一步的,所述升降组件包括安装板、升降丝杆和第二驱动电机,所述安装板与所述小臂固定连接,所述升降丝杆两端通过丝杆支架安装在所述安装板,所述第二驱动电机驱动所述升降丝杆转动,所述升降丝杆侧边的安装板上设置有升降导轨,丝杆螺母套设于所述升降丝杆上且与所述升降丝杆相连,所述固定手指与所述丝杆螺母固定连接。
进一步的,所述底座包括底板和安装柱,所述底板四角设置有固定孔,所述安装柱与所述底板固定连接,所述安装柱顶部为容纳联轴器的半圆柱,所述半圆柱顶面设置有减重凹槽。
进一步的,所述大臂上沿其长度方向开设有若干减重孔。
本发明还提供了一种活动夹爪的操作方法,包括如下步骤:
S10:活动手指打开,固定手指插入第一工位内的工件上方,真空吸盘吸取工件,将工件从第一工位上取下;
S20:活动手指扣合,吸附工件同时与固定手指配合夹紧工件,对工件进行搬运;
S30:固定手指的真空吸盘放开工件,活动手指吸附工件转动;
S40:活动手指将工件放置于第二工位。
本发明的一种活动夹爪、搬运机器人及活动夹爪的操作方法与现有技术相比的有益效果是,能够保证工件运输过程中的稳定、可改变工件姿态,且结构简单、操作灵活。
附图说明
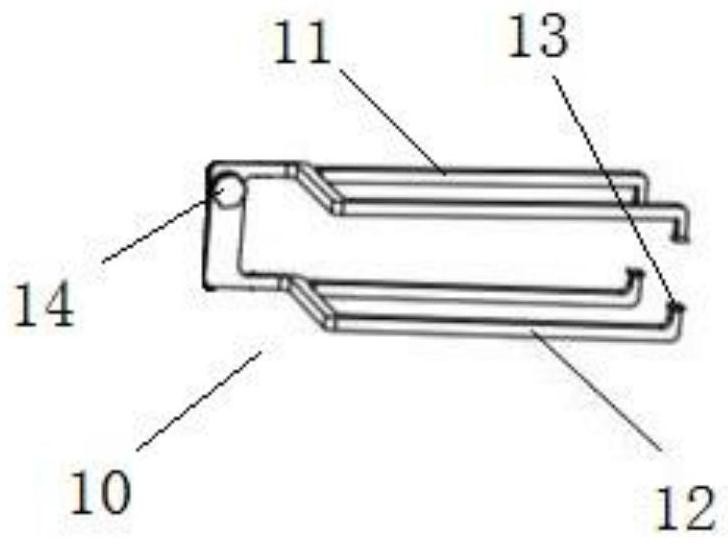
图1是本发明的活动夹爪结构示意图;
图2是本发明的活动手指结构示意图;
图3是本发明的搬运机器人示意图;
图4是本发明的升降组件示意图;
图5是本发明的移动部分示意图。
图中标号说明:10、活动夹爪,11、固定手指,12、活动手指,13、真空吸盘,14、第一驱动电机,15、叉臂,16、叉齿,17、铰接传动孔,18、弯折部,
20、底座,21、底板,22、安装柱,23、固定孔,24、联轴器,25、减重凹槽,
30、大臂,31、减重孔,
40、升降组件,41、安装板,42、升降丝杆,43、第二驱动电机,44、丝杆支架,45、升降导轨,46、丝杆螺母,
50、小臂。
具体实施方式
下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好地理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
参照图1所示,为本发明的一种活动夹爪的实施例。本发明的活动夹爪10包括固定手指11和活动手指12,所述固定手指11和活动手指12的相对面上均安装有真空吸盘13,所述真空吸盘13相对设置,从而从能够从工件相对的两面夹紧工件,且夹紧工件时各手指接触工件的位置固定,保证对工件进行搬运移动时对工件夹持的稳定。所述活动手指12与所述固定手指11铰接,第一驱动电机14从铰接位置连接所述活动手指12,所述第一驱动电机14驱动所述活动手指12绕所述固定手指11旋转任意角度。当拾取工件时,若在第一工位上,工件其中一面与载具相接,则第一驱动电机14驱动活动手指12打开,方便固定手指11吸附工件的自由面,固定手指11将工件从载具上拾起后,第一驱动电机14驱动活动手指12与固定手指11夹紧工件。此种方式对工件的拾取方便,只要工件有表面露出即可被拾取,克服了现有技术中电动夹爪等无法夹取大尺寸工件的困难。由于活动手指12和固定手指11上的真空吸盘13均吸附工件,且工件受活动手指12与固定手指11的夹紧力及支撑作用,因此可以确保工件在被搬运移动过程中的稳定。当放下工件时,若工件需要由另一面与第二工位上的载具配合,如需要第一工位处的自由面与第二工位配合,则固定手指11上的真空吸盘13放开工件,活动手指12吸附工件,第一驱动电机14驱动活动手指12翻转,活动手指12带动工件实现翻转,将工件与第二工位的载具配合,实现工件姿态的调整。
参照图2所示,为方便伸入设备内对工件进行拾取,保证工件在拾取过程中的稳定,所述固定手指11和活动手指12为叉状,包括叉臂15和至少两个叉齿16。叉齿16为细长型,每个叉齿16之间存在间隙,使得活动夹爪10能够在较小的空间内拾取工件。叉臂15连接多个叉齿16,所述叉臂15端部通过铰接传动孔17铰接,第一驱动电机14穿过固定手指11和活动手指12的铰接传动孔17驱动活动手指12。所述真空吸盘13安装于所述叉齿16端部,一方面方便在小空间内拾取固定工件,另一方面该处距离铰接处最远,从而在活动手指12与固定手指11夹紧时能够受到最大的夹持力。为保证固定手指11和活动手指12夹合时,两者之间存在足够容纳工件的空间,所述叉臂15为所在平面与所述叉齿16所在平面垂直的L型。进一步的,所述叉齿16端部向内折弯有弯折部18,所述真空吸盘13设置于所述弯折部末端。当活动手指12与固定手指11夹合时,弯折部18末端最先夹紧,从而能够为工件提供最大的夹持力。
参照图3所示,为本发明的一种搬运机器人的实施例。本发明的搬运机器人除活动夹爪10外还包括底座20、大臂30和升降组件40,所述大臂30一端与所述底座20转动连接,所述升降组件40与所述大臂30另一端转动连接,所述活动夹爪10与所述升降组件40相连。在本发明的一个实施例中,底座20、大臂30和升降组件40组成四轴机械臂,活动夹爪10与四轴机械臂相连。四轴机械臂将活动夹爪10移动至工件所在第一工位处,第一驱动电机14启动活动手指12打开,固定手指11吸附拾取工件,活动手指12复位与固定手指11配合夹紧工件,四轴机械臂再次将工件移动至第二工位处,固定手指11放开工件,第一驱动电机14驱动活动手指12带动工件翻转,将工件放置于第二工位上。完成工件的搬运和翻转。
参照图4所述,在本发明的另一实施例中,由于第一工位和第二工位距离较近,因此可以对四轴机械臂进行简化,本实施例中,所述升降组件40通过小臂50与所述大臂30转动连接,所述升降组件40固定安装于所述小臂50顶部。具体的,所述升降组件40包括安装板41、升降丝杆42和第二驱动电机43,所述安装板41与所述小臂50固定连接,所述升降丝杆42两端通过丝杆支架44安装在所述安装板41,所述第二驱动电机43驱动所述升降丝杆42转动,所述升降丝杆42侧边的安装板41上设置有升降导轨45,丝杆螺母46套设于所述升降丝杆42上且与所述升降丝杆42相连,所述固定手指11与所述丝杆螺母46固定连接。随着第二驱动电机43的启动,升降丝杆42转动,在升降导轨45的导向下,丝杆螺母46带动活动夹爪10沿升降丝杆42长度方向移动,从而活动夹爪10能够升降接触工件,并将工件拾起。
参照图5所示,为保证机器人安装的稳固,所述底座20包括底板21和安装柱22,所述底板21四角设置有固定孔23,所述安装柱22与所述底板21固定连接,方便安装底座20,确保机器人在任意方向受力都可以保持稳定。为进一步实现机器人的轻便,节省材料,也显得美观,所述安装柱22顶部设置为容纳联轴器24的半圆柱,所述半圆柱顶面设置有减重凹槽25;所述大臂30上沿其长度方向开设有若干减重孔31。
本发明的一种活动夹爪的操作方法,包括如下步骤:
S10:活动手指打开,固定手指插入第一工位内的工件上方,真空吸盘吸取工件,将工件从第一工位上取下;单个固定手指占用空间小,方便拾取工件。
S20:活动手指扣合,吸附工件同时与固定手指配合夹紧工件,对工件进行搬运;从两侧对工件进行夹紧,保证工件在搬运过程中的稳定,不会掉落。
S30:固定手指的真空吸盘放开工件,活动手指吸附工件转动;实现工件姿态的改变,操作方便。
S40:活动手指将工件放置于第二工位。
以上所述实施例仅是为充分说明本发明而所举的较佳的实施例,本发明的保护范围不限于此。本技术领域的技术人员在本发明基础上所作的等同替代或变换,均在本发明的保护范围之内。本发明的保护范围以权利要求书为准。
- 一种活动夹爪、搬运机器人及活动夹爪的操作方法
- 一种机器人手指活动夹爪