一种自动剔补苗作业机
文献发布时间:2023-06-19 10:35:20
技术领域
本发明涉及农业移栽机械设备技术领域,具体的说是一种自动剔补苗作业机。
背景技术
中国是世界上最大的蔬菜生产国和消费国,蔬菜种植过程中,种苗的优劣直接决定着蔬菜的生产量和品质。但目前现有技术中的种苗栽培补苗技术还是不够完善。在苗盘的育苗过程中,由于存在漏播、劣质种苗等诸多问题,导致一些穴中出现无苗育出或先天发育不良的现象,从而加剧了蔬菜产量的减少和后续种植过程中补苗的工作量。所以,及时清理苗盘上的不良苗,并补充上发育完好的优质苗,对于蔬菜的栽培来说极其重要。
现有技术中,对于待栽培苗盘的剔苗、补苗方法通常是采用人工查检的方式,来进行不良苗的剔除和优质苗的补给。这种操作方式费事费力,不利于农业生产的现代化;也有一些剔补苗方式为采用一个机械手来进行苗盘上的取苗和夹苗,以实现种苗的剔补工作,由于工作苗盘上劣质苗的出现位置是离散的,这种单一机械手的操作方式,很容易在取苗和补苗的过程时碰触或伤害到其他发育良好的种苗,从而造成种苗的损坏。
发明内容
本发明的技术目的为:提供一种能够全程方便、快速、自动化地完成工作苗盘上劣质苗的自动识别、自动剔除和自动补苗,自动化程度高、移栽效果好,且劣质苗可进行回收利用的高效剔补苗作业机,以节约成本、解放劳动力,并提高产品质量。
本发明为解决上述技术问题,所采用的技术方案是:一种自动剔补苗作业机,包括底座、安装架、控制机构,以及分别与控制机构连接的两条输送线、红外探测器、拍照组件、顶苗组件、剔苗组件和补苗组件,所述的底座呈长方体形结构,两条输送线设置在底座的顶端,且均延其底座的长度方向布置,两条输送线分别用于输送工作苗盘和备用苗盘;
所述的拍照组件设置在用于输送工作苗盘的输送线的起始端,用于在工作苗盘运输至拍照组件的内部时,对工作苗盘进行拍照,并将相应的图片信息传送给控制机构;
所述的安装架架设在两条输送线的上方,安装架包括四个竖直杆和固定在竖直杆顶端的两个水平杆,两个水平杆均垂直于输送线的输送方向设置,所述的红外探测器设置在位于安装架正下方的底座上,用于在检测到已完成拍照的工作苗盘输送至安装架下方时,反馈信息给控制机构,使控制机构调控两条输送线停止输送,所述的顶苗组件设置在输送线停止后工作苗盘的正下方,用于在控制机构的控制下,将工作苗盘上所有的劣质苗向上顶起,所述的剔苗组件和补苗组件均设置在安装架上,剔苗组件用于对顶苗组件顶出的劣质苗进行剔除回收,补苗组件用于将备用苗盘上的优质苗补给至工作苗盘完成剔苗后的空缺位置;
所述的顶苗组件包括多个助推件,每个助推件均对应于工作苗盘中每个苗钵下方的漏水孔设置,每个助推件均包括气缸、连接在气缸活塞杆末端的推杆以及套设在推杆上的缓冲弹簧,所述的气缸与控制机构连接,并能够在控制机构的控制下,将其对应的苗钵向上顶起。
进一步的,所述的拍照组件包括挡光箱、工业相机和补光灯,其中,挡光箱固定在用于输送工作苗盘的输送线的起始端,补光灯设置在挡光箱内的左右侧壁上,工业相机安装在挡光箱的内顶部,所述的拍照组件能够在工作苗盘运输至挡光箱的正下方时,对工作苗盘进行拍照,并将相应的图片信息传送给控制机构。
进一步的,所述的每条输送线均包括驱动电机和多排传动辊,且该驱动电机与控制机构电连接。
进一步的,所述的控制机构包括计算机以及设置在安装架上的控制箱,且控制箱内设置有PLC控制器和步进电机驱动器。
进一步的,所述的剔苗组件包括第一电机、第一丝杆、第一滑座、第二电机、第二丝杆、第二滑座、连接杆Ⅰ、第七电机、第七丝杆和剔苗机械爪,其中,第一电机、第一丝杆和第一滑座水平设置在安装架的其中一个水平杆上,第二电机、第二丝杆和第二滑座水平设置在安装架的另一个水平杆上,连接杆Ⅰ固定在第一滑座和第二滑座之间,且其垂直于两个水平杆设置,所述的第七电机和第七丝杆均设置在连接杆Ⅰ上,且第七丝杠竖直设置,剔苗机械爪水平设置在第七丝杠上,并能够在第七电机和第七丝杆的传动作用下进行上下移动,所述的剔苗机械爪还能够在第一电机、第一丝杆以及第二电机、第二丝杆的传动作用下,随第一滑座、第二滑座和连接杆Ⅰ一起,进行垂直于输送线输送方向的来回运动,所述的第一电机、第二电机和第七电机均与控制机构连接,以完成对劣质苗的剔除回收。
进一步的,所述的剔苗机械爪呈水平设置的叉状结构,包括平行于输送线输送方向设置的横杆和垂直于横杆设置的多个叉条,使每相邻两个叉条之间构成一个用于卡设劣质苗苗钵的U形卡槽。
进一步的,所述剔苗机械爪上U形卡槽的个数与工作苗盘上苗钵的行数相同。
进一步的,所述的补苗组件包括第三电机、第三丝杆、第三滑座、第四电机、第四丝杆、第四滑座、连接杆Ⅱ、连接杆Ⅲ、第五电机、第五丝杆、第六电机、第六丝杆、动作滑座和取苗机械手,其中,第三电机、第三丝杆和第三滑座水平设置在安装架的其中一个水平杆上,第四电机、第四丝杆和第四滑座、水平设置在安装架的另一个水平杆上,连接杆Ⅱ和连接杆Ⅲ均固定在第三滑座和第四滑座之间,且均垂直于两个水平杆设置,所述的第五电机和第五丝杆水平设置在连接杆Ⅱ上,第六电机和第六丝杆水平设置在连接杆Ⅲ上,而动作滑座同时设置在第五丝杆和第六丝杆上,且动作滑座平行于水平杆设置,取苗机械手固定在动作滑块的下方,并能够在第五电机带动第五丝杆,以及第六电机带动第六丝杆的传动作用下,随动作滑座一起,进行平行于输送线输送方向的来回运动,所述的取苗机械手还能够在第三电机、第三丝杆、以及第四电机、第四丝杆的传动作用下,随第三滑座、第四滑座、连接杆Ⅱ和连接杆Ⅲ一起,进行垂直于输送线输送方向的来回运动,所述的第三电机、第四电机、第五电机、第六电机和取苗机械手均与控制机构连接,以完成对备用苗盘上优质苗的抓取和工作苗盘上剔苗后空缺位置的优质苗补给。
进一步的,所述的取苗机械手包括动作气缸、支撑臂、限制单元和底板,其中,动作气缸固定在动作滑块上,且动作气缸竖直设置,底板固定在动作气缸的活塞杆末端,所述支撑臂的个数为多个,多个支撑臂沿底板的周向均匀设置,且每个支撑臂的顶端与底板铰接,每个支撑臂的底端向动作气缸活塞杆的中轴线方向折弯,在每个支撑臂的底端还开设有一个穿设孔,每个穿设孔内均对应固定有一个用于夹去苗钵的苗针,且每个苗针的长度方向与其所对应的支撑臂底端的折弯方向相同,所述的限制单元包括顶板和多个限位爪,顶板固定在动作滑块上,多个限位爪沿顶板下表面的周向均匀设置,且每个限位爪的顶端均与顶板铰接,使整个限位单元构成一个伞状的的限位件,所述的限位单元能够在支撑臂向上运动时,控制支撑臂向动作气缸活塞杆的中轴线方向旋转,以实现多个苗针对苗钵的向上夹取。
有益效果:
1、本发明的一种自动剔补苗作业机结构简单、设计巧妙,可在种苗移栽种植前,通过相机自动拍摄苗盘上的种苗状况,分析识别苗盘中需要换苗的位置,并通过相应的剔苗机械爪及时地剔除劣质苗和基质,进行回收再利用;再经由取苗机械手从备用的苗盘中移栽健康的种苗到缺失位置,完成补苗,从而保证了移栽质量和效率。装置整体自动化程度高,实用效果好,代替人工作业,从而节约人工成本,机械结构设计合理,避免了工作过程中对优质种苗的破坏,从而提高了产品质量,保证了后续的移栽效果。
2、本发明在工作苗盘驻停位置每个苗钵的下方均设置了助推件,当拍照组件检测到劣质苗时,可以通过该助推件精准的顶出该劣质苗,减少对其它苗的影响。在顶苗组件的推杆上套设有缓冲弹簧,防止顶苗时,力过大,顶碎基质,不利于后面的剔除。本发明的自动剔补苗作业机,采用两种不同的机械手进行剔补苗工作,剔苗机械爪设计成连续的U型,便于快速去除所用的劣质苗。相较于单只机械爪的来回剔苗、取苗来说,不仅节省了大量的时间,提高了效率,也避免了来回反复操作对于优质种苗的破坏。
附图说明
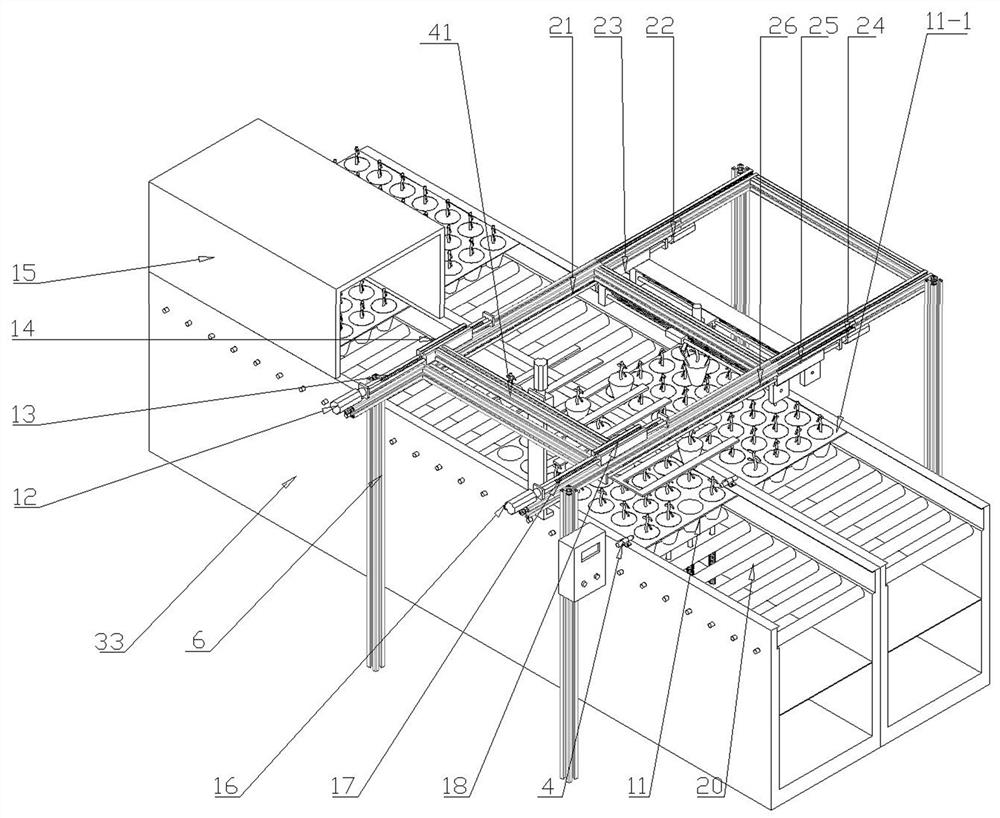
图1为本发明的结构示意立体图;
图2为本发明的结构示意主视图;
图3为本发明中第七电机、第七丝杆和剔苗机械爪的结构示意图;
图4为本发明中补苗组件的导轨图;
图5为本发明中取苗机械手的结构示意图;
图示标记:1、气缸,2、推杆,3、缓冲弹簧,4、红外线探测器,5、控制箱,6、竖直杆,7、剔苗机械爪,7-1、横杆,7-2、叉条,8、工业相机,9、苗钵,10、取苗机械手,11、工作苗盘,11-1、备用苗盘,12、第一电机,13、第一丝杆,14、第一滑座,15、挡光箱,16、第二电机,17、第二丝杆,18、第二滑座,19、补光灯,20、传动辊,21、第三丝杆,22、第三电机,23、第三滑座,24、第四电机,25、第四滑座,26、第四丝杆,27、第五电机,28、第五丝杆,29、动作滑座,30、第六电机,31、第六丝杆,32、水平杆,33、底座,34、第七电机,35、第七丝杆,36、动作气缸,37、支撑臂,38、限制单元,38-1、顶板,38-2、限位爪,39、苗针,40、底板,41、连接杆Ⅰ,42、连接杆Ⅱ,43、连接杆Ⅲ。
具体实施方式
下面结合附图和实例对本发明做进一步详细的说明。
一种自动剔补苗作业机,主要用于去除工作苗盘11上的劣质苗及坏苗,并从备用苗盘11-1上移栽健康苗进行填充,补齐空穴,完成自动补苗工作。具体包括底座33、安装架、控制机构,以及分别与控制机构连接的两条输送线、红外探测器4、拍照组件、顶苗组件、剔苗组件和补苗组件,所述的底座33呈长方体形结构,两条输送线设置在底座33的顶端,且均延其底座33的长度方向布置,两条输送线分别用于输送工作苗盘11和备用苗盘11-1,所述的每条输送线均包括驱动电机和多排传动辊20,且该驱动电机与控制机构电连接,所述的控制机构包括计算机以及设置在安装架上的控制箱5,且控制箱5内设置有PLC控制器和步进电机驱动器。
所述的拍照组件包括挡光箱15、工业相机8和补光灯19,其中,挡光箱15固定在用于输送工作苗盘11的输送线的起始端,补光灯19设置在挡光箱15内的左右侧壁上,工业相机8安装在挡光箱15的内顶部,所述的拍照组件能够在工作苗盘11运输至挡光箱15的正下方时,对工作苗盘11进行拍照,并将相应的图片信息传送给控制机构。
所述的安装架架设在两条输送线的上方,安装架均由30铝型材搭建而成,安装架包括四个竖直杆6和固定在竖直杆6顶端的两个水平杆32,两个水平杆32均垂直于输送线的输送方向设置,所述的红外探测器4设置在位于安装架正下方的底座33上,用于在检测到已完成拍照的工作苗盘11输送至安装架下方时,反馈信息给控制机构,使控制机构调控两条输送线同时停止输送,所述的顶苗组件设置在输送线停止后工作苗盘11的正下方,用于在控制机构的控制下,将工作苗盘11上所有的劣质苗向上顶起,所述的剔苗组件和补苗组件均设置在安装架上,剔苗组件用于对顶苗组件顶出的劣质苗进行剔除回收,补苗组件用于将备用苗盘11-1上的优质苗补给至工作苗盘11完成剔苗后的空缺位置;
所述的顶苗组件包括多个助推件,每个助推件均对应于工作苗盘11中每个苗钵9下方的漏水孔设置,每个助推件均包括气缸1、连接在气缸1活塞杆末端的推杆2以及套设在推杆2上的缓冲弹簧3,所述的气缸1与控制机构连接,并能够在控制机构的控制下,将其对应的苗钵9向上顶起。
所述的剔苗组件包括第一电机12、第一丝杆13、第一滑座14、第二电机16、第二丝杆17、第二滑座18、连接杆Ⅰ41、第七电机34、第七丝杆35和剔苗机械爪7,其中,第一电机12、第一丝杆13和第一滑座14水平设置在安装架的其中一个水平杆32上,第二电机16、第二丝杆17和第二滑座18水平设置在安装架的另一个水平杆32上,连接杆Ⅰ41固定在第一滑座14和第二滑座18之间,且其垂直于两个水平杆32设置,所述的第七电机34和第七丝杆35均设置在连接杆Ⅰ41上,且第七丝杠35竖直设置,剔苗机械爪7水平设置在第七丝杠35上,并能够在第七电机34和第七丝杆35的传动作用下进行上下移动,所述的剔苗机械爪7还能够在第一电机12、第一丝杆13以及第二电机16、第二丝杆17的传动作用下,随第一滑座14、第二滑座18和连接杆Ⅰ41一起,进行垂直于输送线输送方向的来回运动,所述的第一电机12、第二电机16和第七电机34均与控制机构连接,以完成对劣质苗的剔除回收。所述的剔苗机械爪7呈水平设置的叉状结构,包括平行于输送线输送方向设置的横杆7-1和垂直于横杆设置的多个叉条7-2,使每相邻两个叉条7-2之间构成一个用于卡设劣质苗苗钵9的U形卡槽。所述剔苗机械爪7上U形卡槽的个数与工作苗盘上苗钵9的行数相同。
所述的补苗组件包括第三电机22、第三丝杆21、第三滑座23、第四电机24、第四丝杆26、第四滑座25、连接杆Ⅱ42、连接杆Ⅲ43、第五电机27、第五丝杆28、第六电机30、第六丝杆31、动作滑座29和取苗机械手10,其中,第三电机22、第三丝杆21和第三滑座23水平设置在安装架的其中一个水平杆32上,第四电机24、第四丝杆26和第四滑座25水平设置在安装架的另一个水平杆32上,连接杆Ⅱ42和连接杆Ⅲ43均固定在第三滑座23和第四滑座25之间,且均垂直于两个水平杆32设置,所述的第五电机27和第五丝杆28水平设置在连接杆Ⅱ42上,第六电机30和第六丝杆31水平设置在连接杆Ⅲ43上,而动作滑座29同时设置在第五丝杆28和第六丝杆31上,且动作滑座29平行于水平杆32设置,取苗机械手10固定在动作滑块29的下方,并能够在第五电机27带动第五丝杆28,以及第六电机31带动第六丝杆31的传动作用下,随动作滑座29一起,进行平行于输送线输送方向的来回运动,所述的取苗机械手10还能够在第三电机22、第三丝杆21、以及第四电机24、第四丝杆26的传动作用下,随第三滑座23、第四滑座25、连接杆Ⅱ42和连接杆Ⅲ43一起,进行垂直于输送线输送方向的来回运动,所述的第三电机22、第四电机24、第五电机27、第六电机30和取苗机械手10均与控制机构连接,以完成对备用苗盘11-1上优质苗的抓取和工作苗盘11上剔苗后空缺位置的优质苗补给。所述的取苗机械手10包括动作气缸36、支撑臂37、限制单元38和底板40,其中,动作气缸36固定在动作滑块29上,且动作气缸36竖直设置,底板40固定在动作气缸36的活塞杆末端,所述支撑臂37的个数为多个,多个支撑臂37沿底板40的周向均匀设置,且每个支撑臂37的顶端与底板40铰接,每个支撑臂37的底端向动作气缸36活塞杆的中轴线方向折弯,在每个支撑臂37的底端还开设有一个穿设孔,每个穿设孔内均对应固定有一个用于夹去苗钵9的苗针39,且每个苗针39的长度方向与其所对应的支撑臂37底端的折弯方向相同,所述的限制单元38包括顶板38-1和多个限位爪38-2,顶板38-1固定在动作滑块29上,多个限位爪38-2沿顶板38-1下表面的周向均匀设置,且每个限位爪38-2的顶端均与顶板38-2铰接,使整个限位单元构成一个伞状的的限位件,所述的限位单元38能够在支撑臂37向上运动时,控制支撑臂37向动作气缸36活塞杆的中轴线方向旋转,以实现多个苗针39对苗钵9的向上夹取。
本发明中所有的电机与其相配套的和丝杆之间均通过联轴器进行连接,滑座分别通过螺纹与其相配套的丝杠进行连接。
为叙述方便,如图二所示,下述实施例将采用X、Y、Z坐标系的方式进行描述,其中,X轴与Y轴构成水平面(其中Y轴为工作苗盘的移动方向,X轴为垂直于Y轴方向),Z轴的正方向垂直于X-Y平面向上。
如图所示,本发明的自动剔补苗作业机主要包括有两安装架、工业相机8、剔苗机械爪7、取苗机械手10、剔苗组件的导轨、补苗组件的导轨(图四)和顶苗组件。
工作苗盘11和备用苗盘11-1平行分布于两条不同的传动装置上。工作苗盘11首先在传动辊20的带动下进入挡光箱15内,在分布于两侧的补光灯15-1作用下,上方的工业相机8进行拍照,并把图像传输到控制机构中的计算机,计算机将采集到的图像进行灰度处理、灰度阈值分割、噪声去除等手段处理,判断每穴种苗的形态,并通过图像处理得到劣苗和缺苗的位置,并将信息传输到安装架上的控制箱5。
所述的红外探测仪4位于安装架下方的工作区域,当经过相机组件检测的工作苗盘11到达工作区域时,苗茎就会遮挡红外探测仪4的红外光,控制机构控制输送线停止,工作苗盘11就会停止向前运输。
所述的顶苗组件位于工作区域的正下方,下方的气缸1在计算机的控制下开始工作,推杆2向上移动,将工作苗盘11内的劣苗顶出一定高度。推杆2运动到一定距离时,缓冲弹簧3就会产生一定的反向作用力,防止力过大,顶坏基质。
所述的剔苗组件包括第一电机12、第二电机16、第一丝杆13、第二丝杆17、第一滑座14、第二滑座18、第七电机34、第六丝杆35。电机均能够在接受到计算机的工作指令后,第一电机12、第二电机16开始工作,将剔苗机械爪7在X方向移动到工作区域以内。剔苗机械爪7深入到工作苗盘11的下方,此时第七电机34、第七丝杆35开始工作,剔苗机械爪7向上运动,带走所有的劣质苗。然后第一电机12、第二电机16、第一丝杆13、第二丝杆17、再次工作带动第一滑座14、第二滑座18向X轴负方向运动,苗钵9在剔苗机械爪7的运动下,带出工作区域,进行回收。
所述的取苗组件包括了第三丝杆21、第三电机22、第三滑座23、第四电机24、第四滑座25、第四丝杆26、第五电机27、第五丝杆28、动作滑座29、第六电机30、第六滑座31。当剔苗机械爪7将劣质钵苗运出工作苗盘11后,备用苗盘11-1在计算机控制下开始工作,计算机控制取苗机械爪10沿着Z轴负方向运动,深入钵苗基质进行夹取取苗。第三电机22、第四电机24通过联轴器带动第三丝杆21、第四丝杆26转动,第三丝杆21和第四丝杆26上设置的第三滑座23和第四滑座25将带动取苗机械爪10沿着X轴负方向运动,到达工作苗盘11空穴的某列上。第五电机27、第六电机30开始工作带动第五丝杆28、第六丝杆31转动,动作滑座29沿着Y轴方向移动,到达缺苗位置。取苗机械爪10在气缸的作用下松开苗针,完成补苗工作。
所述的取苗机械手10固定在动作滑座29的正下方,包括了动作气缸36、支撑臂37、限制单元38、苗针39、底板40。动作滑座29上开有圆周分布的螺纹孔,起到连接动作气缸36和限制单元38的作用。底板40固定在动作气缸36的活塞杆末端,并能够随活塞杆上下移动。支撑臂37一端与底板40铰接,另一端开有孔,用来固定苗针39。工作过程中动作气缸36通过控制活塞杆间接使底板40上下移动。当向上移动时,限制单元38使得支撑臂37向中心靠拢,通过苗针39进行插入抓取苗钵;当向下运动时,支撑臂37受到限制单元38的作用减小,苗针逐渐松开苗钵,进行投苗操作。
本发明的工作过程如下:
水平面内搭建两套传送装置,一条运输工作苗盘11,一条运送备用苗盘11-1。工作苗盘11始终向Y轴正方向运动。首先通过挡光箱15,挡光箱15中位于左右两侧的补光灯15-1亮,位于挡光箱15上方的工业相机8获取种苗图片,并把图像传输到计算机。将采集到的图像进行灰度处理、灰度阈值分割、噪声去除等手段处理,判断每穴种苗的形态,并通过图像处理得到劣苗和缺苗的位置,并将信息传输到前方的控制箱5。
工作苗盘11在传动辊20的带动下运动到剔苗机械爪7和取苗机械手10的工作范围内,此时位于工作苗盘前排的苗钵9遮挡住红外探测仪4发出的光,传动辊20停止转动,工作苗盘11停在当前位置。备用苗盘11-1在传动辊20作用下停在和工作苗盘11相同位置。
此时控制箱5通过指令控制位于工作苗盘11正下方的气缸1驱动,将检测到的劣质苗通过推杆2和缓冲弹簧3全部顶起。根据坐标指令驱动剔苗导轨沿着X轴方向和Z轴方向运动,带动剔苗机械爪带走所有劣质苗。同时,取苗机械爪10通过指令,可以在X、Y、Z平面内运动。取苗机械爪10在备用苗盘11-1取苗完成后,通过滑座的移动到达工作苗盘的正上方,投入到空穴中。完成一次剔补苗操作。同理,完成工作苗盘11上其它的空穴补苗工作。该工作苗盘11上全部的补苗工作结束后,启动传动辊20,带走工作苗盘,达到新的位置,开始新的补苗流程。
最后应当说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明的全部内容,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述实施例所记载的技术方案进行形式上的修改,或者对其中部分技术特征进行等同替换。凡在本发明的思路启示之内所作出的形式修改、等同替换等,均应包含在本发明的权利保护范围之内。
- 一种自动剔补苗作业机
- 一种双视觉检测的带链交叉输送式剔补苗移植机