一种三工位旋转式全自动液体灌装机
文献发布时间:2023-06-19 10:40:10
技术领域
本发明涉及一种三工位旋转式全自动液体灌装机。
背景技术
在液体灌装领域,全自动灌装越来越成为未来的发展趋势,全自动灌装包含了自动寻盖、自动旋盖、自动灌装、自动上盖全过程。全自动灌装,可大大降低人力资源的消耗,有效降低人力成本,并同时降低操作工的劳动强度。一般的全自动灌装机一般具有寻孔、旋盖以及灌装等三个工位,而且采用直线运动来完成三工位的切换。然而,直线运动三工位导致灌装结构较为复杂占用空间较大且定位不太准确可靠。
发明内容
基于此,有必要提供一种结构较为简单、占用空间较小且定位较为准确可靠的三工位旋转式全自动液体灌装机。
一种三工位旋转式全自动液体灌装机,包括机架、输送组件、转桶机构与灌装机构,所述输送组件设置于所述机架上,用于输送灌装桶,所述转桶机构安装于所述机架上用于旋转灌装桶,所述灌装机构包括电控箱、旋转架、寻孔组件、灌装组件、升降旋盖组件与双行程气缸,所述电控箱及所述旋转架均安装于所述机架上,所述寻孔组件、所述灌装组件与所述升降旋盖组件分别呈预设夹角安装于所述旋转架的前端并均与所述电控箱电性连接,所述双行程气缸通过曲柄与所述旋转架连接,所述双行程气缸用于通过所述旋转架带动所述升降旋盖组件旋转至所述灌装桶的桶口上方以实现所述双行程气缸的第一行程,所述双行程气缸还用于通过所述旋转架带动所述灌装组件旋转至所述灌装桶的桶口上方,以实现所述双行程气缸的第二行程。
在其中一个实施方式中,所述预设夹角为30度夹角,所述电控箱安装于所述旋转架的后端并与所述灌装组件的升降气缸的侧面相连接。
在其中一个实施方式中,所述灌装机构位于所述灌装桶的上方,所述输送组件包括多个平行设置的输送辊。
在其中一个实施方式中,所述转桶机构包括设置于所述机架上的主动转桶组件与从动转桶组件,所述主动转桶组件与所述从动转桶组件分别位于所述灌装桶的相对两侧。
在其中一个实施方式中,所述主动转桶组件包括两个夹持架,所述两个夹持架相互转动连接且二者之间形成有夹角,所述两个夹持架上均设置有两个转动滚轮。
在其中一个实施方式中,所述从动转桶组件上设置有两个从动滚轮,所述两个从动滚轮抵持于所述灌装桶的侧壁上。
在其中一个实施方式中,所述主动转桶组件还包括驱动电机,所述驱动电机通过两组皮带轮组件分别驱动所述两个夹持架相向转动或者相互远离。
在其中一个实施方式中,所述曲柄的一端连接于所述双行程气缸的输出轴上,另一端设置有端盖,所述端盖将所述旋转架的转轴抱箍于所述曲柄的端部。
在其中一个实施方式中,所述灌装组件位于所述寻孔组件与所述升降旋盖组件之间,所述灌装组件包括多个转动卡爪。
在其中一个实施方式中,所述双行程气缸的主轴的伸缩方向与所述传输组件的传输方向平行,所述寻孔组件包括一个寻孔滚轮,所述寻孔滚轮的中轴线与地面平行。
上述三工位旋转式全自动液体灌装机的优点是:因为采用旋转式运动来完成全部流程,整套灌装机结构相较直线运动更为紧凑、占用空间较小,结构简单、成本低廉。寻孔、旋盖、灌装采用双行程气缸驱动曲柄带动旋转轴旋转来完成,定位极为准确可靠,双行程气缸的三工位分别处于气缸的起始位置、第一行程位置、第二行程位置。上述三工位旋转式全自动液体灌装机设备适用范围广,尤其适用于某些物料特性不佳(例如苯酚、乙二胺等)的场合,在这些情况下若采用直线运动来完成三工位的切换,则运动部件易收到物料的腐蚀和粘连而导致设备完全无法使用。另外,由于采用双行程气缸驱动,此设备同时适用于防爆/非防爆场合,避免了防爆场合采用防爆电机旋转成本高昂的问题。
附图说明
图1为一实施例的三工位旋转式全自动液体灌装机的立体示意图。
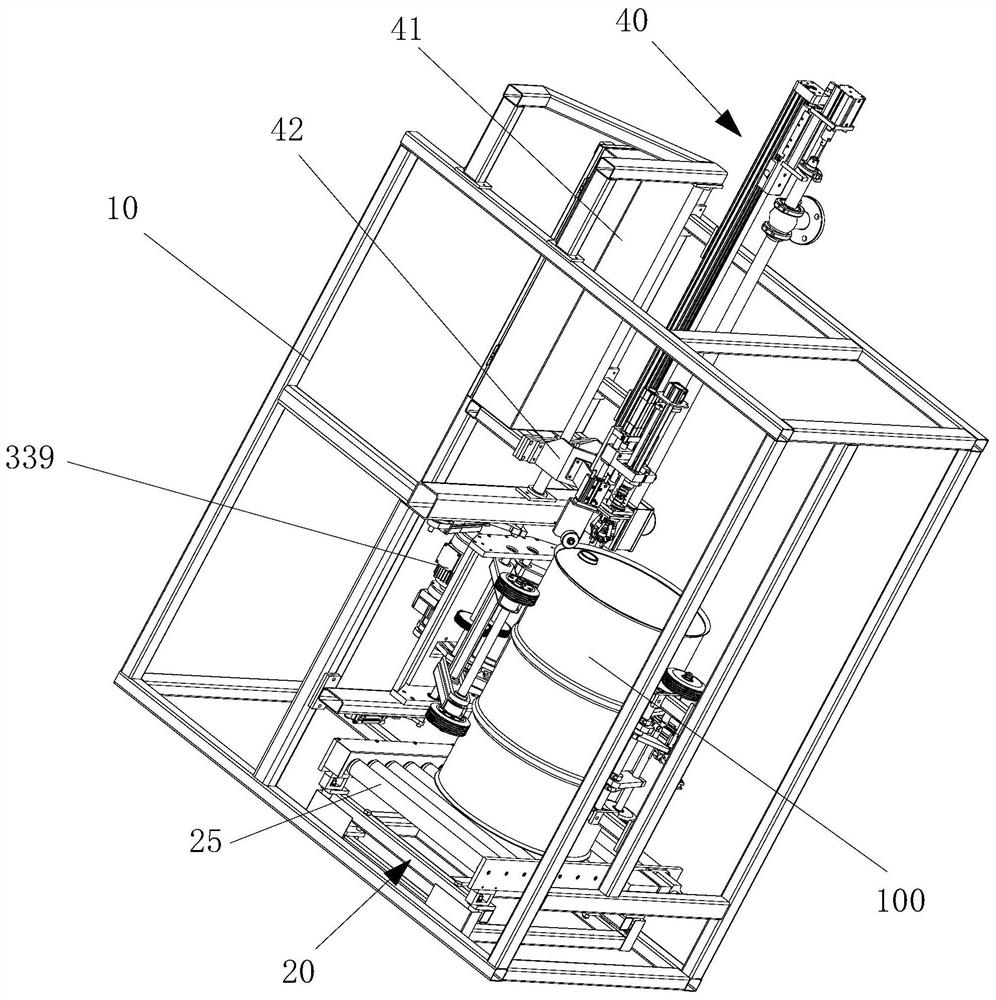
图2为图1所示三工位旋转式全自动液体灌装机移除机架后的立体示意图。
图3为一实施例的灌装机构的立体示意图。
图4为一实施例的双行程气缸的立体示意图。
具体实施方式
为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳实施方式。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本发明的公开内容理解的更加透彻全面。
需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
本发明涉及一种三工位旋转式全自动液体灌装机。所述三工位旋转式全自动液体灌装机包括机架、输送组件、转桶机构与灌装机构,所述输送组件设置于所述机架上,用于输送灌装桶,所述转桶机构安装于所述机架上用于旋转灌装桶,所述灌装机构包括电控箱、旋转架、寻孔组件、灌装组件、升降旋盖组件与双行程气缸,所述电控箱及所述旋转架均安装于所述机架上,所述寻孔组件、所述灌装组件与所述升降旋盖组件分别呈预设夹角安装于所述旋转架的前端并均与所述电控箱电性连接,所述双行程气缸通过曲柄与所述旋转架连接,所述双行程气缸用于通过所述旋转架带动所述升降旋盖组件旋转至所述灌装桶的桶口上方以实现所述双行程气缸的第一行程,所述双行程气缸还用于通过所述旋转架带动所述灌装组件旋转至所述灌装桶的桶口上方,以实现所述双行程气缸的第二行程。
请参阅图1至图4,一种三工位旋转式全自动液体灌装机,包括机架10、输送组件20、转桶机构30与灌装机构40,所述输送组件20设置于所述机架10上,用于输送灌装桶100,所述转桶机构30安装于所述机架10上用于旋转灌装桶100,所述灌装机构40包括电控箱41、旋转架42、寻孔组件43、灌装组件44、升降旋盖组件45与双行程气缸48,所述电控箱41及所述旋转架42均安装于所述机架10上,所述寻孔组件43、所述灌装组件44与所述升降旋盖组件45分别呈预设夹角安装于所述旋转架42的前端并均与所述电控箱41电性连接,所述双行程气缸48通过曲柄485与所述旋转架42连接,所述双行程气缸48用于通过所述旋转架42带动所述升降旋盖组件45旋转至所述灌装桶100的桶口上方以实现所述双行程气缸48的第一行程,所述双行程气缸48还用于通过所述旋转架42带动所述灌装组件44旋转至所述灌装桶100的桶口上方,以实现所述双行程气缸48的第二行程。
在上述三工位旋转式全自动液体灌装机中,所述寻孔组件43、所述灌装组件44与所述升降旋盖组件45分别呈预设夹角安装于旋转装置的前端,当前端输送机送来的灌装桶100到输送组件20上后灌装桶100停止前进,此时寻孔装置下降到位,然后主、从动转桶组件35将灌装桶100紧紧抱住,接下来主动转桶组件33带动灌装桶100转动,当桶口经过寻孔组件43时停止旋转,此后旋转架42在双行程气缸48的作用下将升降旋盖组件45准确旋转至桶口上方,此时完成双行程气缸48第一行程。升降旋盖组件45下降完成开盖后带盖上升,旋转架42再次在双行程气缸48的作用下将灌装组件44准确旋转至桶口上方,此时完成双行程气缸48第二行程,灌装组件44在升降气缸作用下降至桶内底部,此时主、从动转桶组件35将灌装桶100松开,灌装组件44开始灌装至目标值,灌装完成后,主、从动转桶组件35再次将灌装桶100抱住,旋转架42将带盖的升降旋盖组件45再次旋转至桶口上方,升降旋盖组件45下降将盖重新旋上桶口,输送组件20再次启动将升降旋盖组件45输送至下一工位,同时旋转架42也回到起始位置,开始下一流程。
上述三工位旋转式全自动液体灌装机的优点是:因为采用旋转式运动来完成全部流程,整套灌装机结构相较直线运动更为紧凑、占用空间较小,结构简单、成本低廉。寻孔、旋盖、灌装采用双行程气缸48驱动曲柄485带动旋转轴旋转来完成,定位极为准确可靠,双行程气缸48的三工位分别处于气缸的起始位置、第一行程位置、第二行程位置。上述三工位旋转式全自动液体灌装机设备适用范围广,尤其适用于某些物料特性不佳(例如苯酚、乙二胺等)的场合,在这些情况下若采用直线运动来完成三工位的切换,则运动部件易收到物料的腐蚀和粘连而导致设备完全无法使用。另外,由于采用双行程气缸48驱动,此设备同时适用于防爆/非防爆场合,避免了防爆场合采用防爆电机旋转成本高昂的问题。
例如,为了便于提高电控箱41的安装刚性,所述电控箱41安装于所述旋转架42的后端并与所述灌装组件44的升降气缸的侧面相连接,从而可以提高所述电控箱41的安装刚性。所述预设夹角为30度夹角。
例如,为了便于驱动所述灌装桶100旋转,所述灌装机构40位于所述灌装桶100的上方,所述输送组件20包括多个平行设置的输送辊25。所述转桶机构30包括设置于所述机架10上的主动转桶组件33与从动转桶组件35,所述主动转桶组件33与所述从动转桶组件35分别位于所述灌装桶100的相对两侧。所述主动转桶组件33包括两个夹持架335,所述两个夹持架335相互转动连接且二者之间形成有夹角,所述两个夹持架335上均设置有两个转动滚轮338。所述从动转桶组件35上设置有两个从动滚轮358,所述两个从动滚轮358抵持于所述灌装桶100的侧壁上。通过设置所述两个呈角度设置的夹持架335,从而方便夹持定位所述灌装桶100,并可以驱动所述灌装桶100旋转。
例如,为了便于将所述旋转架42连接于所述曲柄485上,所述主动转桶组件33还包括驱动电机339,所述驱动电机339通过两组皮带轮组件3395分别驱动所述两个夹持架335相向转动或者相互远离。所述曲柄485的一端连接于所述双行程气缸48的输出轴上,另一端设置有端盖488,所述端盖488将所述旋转架42的转轴抱箍于所述曲柄485的端部。所述灌装组件44位于所述寻孔组件43与所述升降旋盖组件45之间,所述灌装组件44包括多个转动卡爪445。所述双行程气缸48的主轴的伸缩方向与所述传输组件的传输方向平行,所述寻孔组件43包括一个寻孔滚轮435,所述寻孔滚轮435的中轴线与地面平行。通过设置所述端盖488,从而使得所述旋转架42的转轴能够较为方便地连接于所述曲柄485上。
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施方式仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
- 一种三工位旋转式全自动液体灌装机
- 一种旋转式全自动液体灌装机