一种车辆后部碰撞预警方法
文献发布时间:2023-06-19 10:40:10
技术领域
本发明属于汽车技术领域,涉及一种车辆后部碰撞预警方法。
背景技术
随着人们生活条件的提高,汽车已成为每家每户出行的代步工作,但是随之带来的交通事故也越来越频繁,其中车辆后部碰撞的事故较为常见。
众所周知,由于跟车间距过小和速度过高,驾驶员反映迟缓、精力不集中、前车突然刹车等原因,经常会出现追尾事故,特别是快车道或高速公路等道路一般车速较高,因此一旦有辆车发生追尾就会造成一连串追尾,连锁反应强烈,人员伤亡概率很高。另外,除车辆追尾外,在城市道路中两轮车追尾乘用车导致骑行者死亡的事件,驾驶员倒车导致行人卷入车底而丧生的事故也时有发生。
针对上述车辆后部发生的碰撞事故,现有中国专利文献公开了一种车辆后碰撞预警方法包括获取车辆后方目标物的运动信息和车辆自身的运动信息;根据所述后方目标物的运动信息与所述车辆自身的运动信息,计算所述后方目标物与所述车辆的预碰撞时间:当所述预碰撞时间小于等于第一时间阈值、且所述车辆处于静止状态时判断所述车辆的前方是否有前方目标物;当所述车辆的前方存在前方目标物且所述前方目标物距离所述车辆的距离小于第一距离差阈值时对所述车辆进行制动。该发明虽然能够避免车辆发生二次碰撞或连环碰撞,减小碰撞损失,但是该发明为避免二次碰撞仅采用制动的策略,若发生碰撞时的速度较大时,对车内人员以及车外人员仍会造成较大的伤害,安全性较低。
发明内容
本发明的目的是针对现有技术存在的上述问题,提出了一种车辆后部碰撞预警方法,其所要解决的技术问题是:如何降低车辆后部碰撞所造成的伤害。
本发明的目的可通过下列技术方案来实现:一种车辆后部碰撞预警方法,包括如下步骤:
A、获取本车车辆与后方目标物的速度差V1以及距离差S1;
B、在判断速度差V1小于第一速度差阈值且距离差S1小于第一距离差阈值时判断车辆前方是否存在前方目标物;
C、在存在前方目标物时获取前方目标物与本车车辆的速度差V2以及距离差S2;在不存在前方目标物时控制车辆执行加速前进的操作;
D、在判断速度差V2大于或等于第二速度差阈值且距离差S2大于或等于第二距离差阈值时控制车辆执行加速前进的操作;在判断速度差V2小于第二速度差阈值和/或距离差S2小于第二距离差阈值时控制车辆执行制动操作或者执行向相邻车道变道的操作。
本车辆后部碰撞预警方法的工作原理为:在车辆行驶过程中,实时获取本车车辆与后方目标物的速度差V1和距离差S1,在速度差V1小于第一速度差阈值且距离差S1小于第一距离差阈值时判断本车车辆是否存在前方目标物,在不存在前方目标物或者在存在前方目标物但前方目标物与本车车辆的速度差V2大于第二速度差阈值且距离差S2大于第二距离差阈值时说明本车车辆具有加速空间,则通过控制车辆进行加速前进来避免与后方目标物发生碰撞,保证车辆行驶的安全性;在速度差V2小于第二速度差阈值和/或距离差小于第二距离差阈值时,在本车车辆发生后部碰撞时有可能造成与前车目标物也发生碰撞,此时执行车辆制动操作或者变道操作。通过制动的操作,在本车车辆与后方目标物的碰撞不可避免且前方也有目标物时,可避免本车车辆在发生后部碰撞时仍继续向前行驶而造成与前车目标物发生碰撞的情况,避免造成连环交通事故,可有效降低车辆后部碰撞所造成的伤害。
在上述的车辆后部碰撞预警方法中,在所述步骤C和步骤D中,执行加速前进的操作后,获取本车车辆的加速度a1并判断加速度a1是否大于加速度阈值,在判断结果为是时,启动安全带预紧功能;在判断结果为否时,不进行操作。启动安全带预紧功能,可将驾驶员与车内乘员安全固定在座椅上,同时也能保证驾驶员的安全驾驶,保证车内人员的安全。
在上述的车辆后部碰撞预警方法中,在启动安全带预紧功能前,还获取车辆加速前进前的车辆行驶速度,在车辆行驶速度小于中档速度阈值时,不启动安全带预紧功能;在车辆行驶速度大于或等于中档速度阈值时,启动安全带预紧功能。增加车辆行驶速度的判断,可提高安全带预紧功能执行的精确性。
在上述的车辆后部碰撞预警方法中,在所述步骤D中,在判断速度差V2小于第二速度差阈值或距离差S2小于第二距离差阈值时获取相邻车道的车辆状况信息,根据车辆状况信息判断是否满足执行向相邻车道变道的操作,在满足时,执行向相邻车道变道的操作,在不满足时,执行制动操作。采用车辆变道的方式,可有效降低与后方目标物发生碰撞的概率,提高车辆安全。
在上述的车辆后部碰撞预警方法中,获取的相邻车道的车辆状态信息包括:
通过激光雷达获取相邻车道上车辆的方位信息和行驶速度信息。通过方位信息和行驶速度信息,可判断本车车辆在进行变道时是否会与相邻车道上的车辆发生碰撞,从而提高执行车辆变道操作的安全性。
在上述的车辆后部碰撞预警方法中,在所述步骤D中,在控制车辆执行制动操作时获取车辆制动减速度b1,在判断制动减速度b1大于减速度差阈值时启动安全气囊点爆。
在上述的车辆后部碰撞预警方法中,在所述步骤D中,在控制车辆执行向相邻车道变道的操作时获取车辆转向角速度w1,在判断转向角速度w1大于角速度阈值时启动安全气囊点爆。
在车辆制动减速度b1大于减速度阈值,或者转向角速度w1大于角速度阈值时,启动安全气囊点爆,能够避免驾驶员与乘员撞击到车内饰硬点,起到保护作用,降低车内人员的伤害。
在上述的车辆后部碰撞预警方法中,在启动安全气囊点爆操作前获取车辆变道操作前或制动操作前的车辆行驶速度,在车辆行驶速度小于或等于低档速度阈值时,不启动安全气囊点爆;在车辆行驶速度大于抵挡速度阈值时,启动安全气囊点爆。
在上述的车辆后部碰撞预警方法中,在所述步骤B中,还设置有第三速度差阈值,所述第三速度差阈值小于第一速度差阈值,在判断速度差V1小于第一速度差阈值但大于或等于第三速度差阈值时,对后方目标物发出预警提醒;在速度差V1小于第三速度差阈值时判断车辆前方是否存在前方目标物。设置第三速度差阈值和第一速度差阈值,可在车辆存在碰撞风险时,即发出提醒,降低车辆发生后部碰撞的风险,同时也能提高车辆执行后部碰撞预警的准确性。
在上述的车辆后部碰撞预警方法中,在所述步骤D中,在执行制动操作时还对后方目标物的类别进行识别,在后方目标物不是机动车时启动车辆后部的行人保护气囊;在后方目标物是机动车时不启动行人保护气囊。
与现有技术相比,本车辆后部碰撞预警方法具有以下优点:
1、本发明通过判断前后目标物与本车车辆的速度差以及距离差来对车辆后部碰撞发出提前预警,采用加速、制动或变道的预警措施,减小二次碰撞或者连环碰撞的事故概率,降低了车辆后部碰撞所产生的伤害。
2、本发明预警措施还包括启动安全气囊,其解决了由于预警产生之后带来本车车速变化引起的本车前后乘员颈部或胸部受伤的问题,有效保护了车内所有乘员及驾驶员的安全。
3、本发明还能在识别后方目标物位行人及二轮车骑行者时,通过点爆车辆后部的行人安全气囊或者提醒行人的功能,有效保护行人及二轮车骑行者的安全。
附图说明
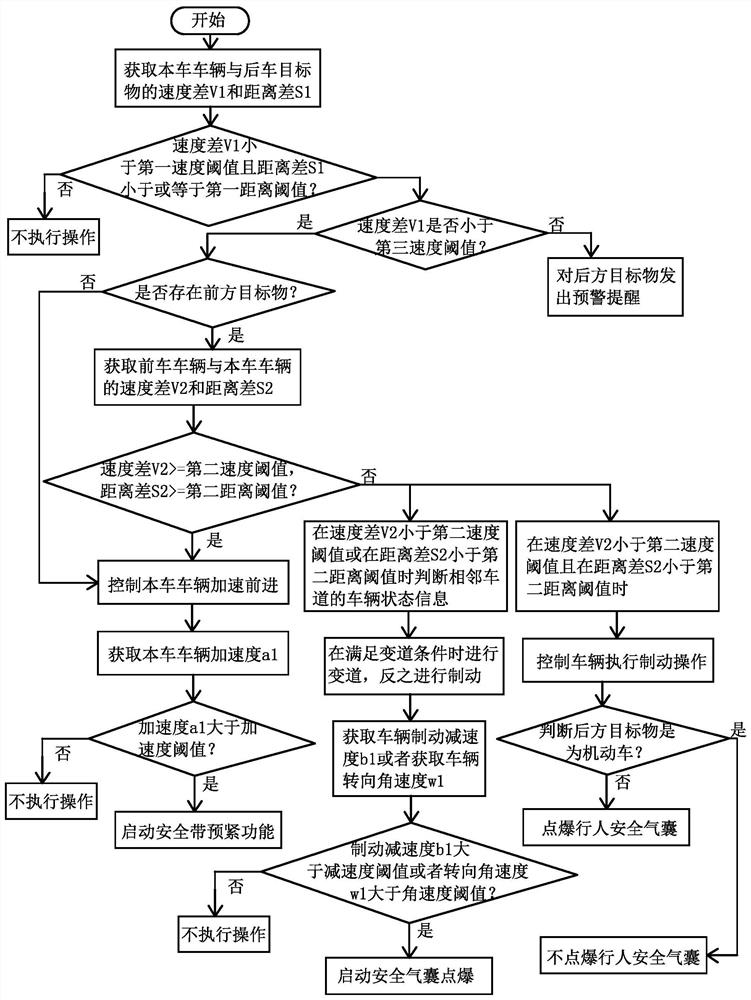
图1是本发明的控制流程图。
图2是本发明实施例一的控制流程图。
图3是本发明实施例二的控制流程图。
图4是本发明实施例三的控制流程图。
具体实施方式
以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
实施例一:
如图1、2所示,本车辆后部碰撞预警方法在车辆行驶过程中,实时判断车辆后方是否存在后方目标物,在存在时,实时获取本车车辆与后方目标物之间的距离差S1和速度差V1,在判断距离差S1小于第一距离阈值且速度差V1小于第一速度阈值时,此时,还进一步判断速度差V1是否大于或等于第三速度阈值,在速度差V1大于或等于第三速度阈值时,本车车辆启动预警提醒功能,发出图像信号提示,如请注意保持车距等字样,或者发出声音信号提示,提醒后方车辆注意车距;
在判断距离差S1小于第一距离阈值且速度差V1小于第三速度阈值时判断本车车辆前方是否存在前方目标物,在不存在前方目标物时控制车辆执行加速前进操作,在执行车辆加速前进后,实时获取车辆的加速度a1,同时获取车辆加速前进前的车辆行驶速度,在车辆行驶速度大于中档速度阈值且在加速度a1大于加速度阈值时,启动安全带预警功能,在加速度a1小于或等于加速度阈值或者车辆行驶速度小于或等于中档速度阈值时,不进行操作。其中,中档速度阈值可以设定在45-55km/h之间,优选为50km/h。
在存在前方目标物时获取前方目标物与本车车辆的距离差S2和速度差V2,在判断距离差S2大于或等于第二距离阈值且速度差V2大于或等于第二速度阈值时控制车辆执行加速前进操作。在执行车辆加速前进后,实时获取车辆的加速度a1,同时获取车辆加速前进前的车辆行驶速度,在车辆行驶速度大于中档速度阈值且在加速度a1大于加速度阈值时,启动安全带预警功能,在加速度a1小于或等于加速度阈值或者车辆行驶速度小于或等于中档速度阈值时,不进行操作。
在距离差S2小于第二距离阈值但速度差V2大于或等于第二速度阈值时判断相邻车道的车辆状态信息,在相邻车道的车辆的速度与距离满足变道要求时,控制车辆执行变道操作,此时还对车辆的转向角速度w1进行获取以及对车辆转向前的车辆行驶速度进行获取,通过判断转向角速度w1和车辆行驶速度来确定是否启动安全气囊点爆,在车辆行驶速度大于低档速度阈值且在转向角速度w1大于角速度阈值时控制车辆执行启动安全气囊点爆的操作,其中低档速度阈值可设定为15km/h;在转向角速度w1小于或等于角速度阈值或者车辆行驶速度小于或等于低档速度阈值时不进行操作;
在相邻车道的车辆的速度与距离不满足变道要求时,控制车辆执行制动操作,此时获取车辆的制动减速度b1,在制动减速度b1大于减速度阈值时,启动安全气囊点爆,从而避免驾驶员及生源撞击到乘员舱内饰硬点,起到安全保护作用,其中,为了保证安全气囊点爆的准确性,在进行安全气囊点爆操作前,还进行判断车辆执行制动操作前的车辆行驶速度进行获取,在车辆行驶速度小于低档速度阈值,即小于15km/h时,即使制动减速度b 1大于减速度阈值,也不启动安全气囊点爆;在制动减速度b1小于或等于减速度阈值时,不启动安全气囊点爆,即不执行操作。
在执行制动操作时,对后方目标物的类别进行识别,判断后方目标物是否为机动车,即是否为行人或二轮车骑行者。是否识别后方目标物的条件还可以增加对车辆行驶速度的判断,在车辆行驶速度大于低档速度阈值但小于中档速度阈值时,对后方目标物的类别进行识别。在识别后方目标物为行人或二轮车骑行者时,除进行制动操作外还启动车辆后部的行人安全气囊,通过行人安全气囊保护两轮车骑行者头部及腿部等部位的安全,减少伤亡;在识别后方目标物为机动车时,不启动行人安全气囊,即不执行操作。
在本实施例中,通过前激光雷达来判断车辆前方是否存在前方目标物,前激光雷达发射电磁波至车辆前方,在有反射回来的信号时则可判断车辆前方是存在前方目标物的,通过前激光雷达还可以获取前方目标物与本车车辆的速度差V2和距离差S2以及与相邻车道上车辆的速度差和距离差,以此来判断是否可以通过变道来降低事故伤害;通过后摄像头识别后方目标物的形状及与本车车辆的速度差V1和距离差S1,也可以识别相邻车道上的车辆信息,以此来判断是否可以通过变道来降低事故伤害;通过刹车系统实现对车辆的制动操作;通过油门系统实现对车辆的加速前进操作;通过转向系统实现对车辆的转向操作;通过预紧式安全带实现对车内人员的安全带预紧操作;通过加速度传感器检测本车车辆的加速度a1或制动减速度b1;通过角速度传感器检测本车车辆的转向角速度w1;通过ACU控制器对前激光雷达获取的信息以及后摄像头获取的信息进行处理并发出各种控制指令,如控制车辆执行加速前进、控制车辆变道、控制车辆制动、安全带预紧以及车内安全气囊以及车外行人安全气囊点爆等。ACU控制器为车内安全控制的辅助控制器,也可以集成在车辆的整车控制器中。
在本车辆后部碰撞预警方法出现各种阈值都是预先存储在ACU控制器中的,其中,各种阈值的设置可以通过人为进行设置,并不固定,相关人员可以根据驾驶情况进行设定,提高车辆后部碰撞预警的准确性和安全性。在本实施例中,对阈值的设定进行举例说明,第一速度差阈值可以设定在3-6km/h之间,优选地,可以设定为5km/h;第二速度车阈值与第一速度差阈值相同设置,第三速度差阈值可以设定在-2至0km/h之间,作为优选,可以设定为0km/h;第一距离差阈值和第二距离差阈值均可设定在3-6m之间,作为优选,可设定为5m。
实施例二、
如图1、3所示,本实施例中的技术方案与实施例一中的技术方案基本相同,不同之处在于,在判断距离差S1小于第一距离阈值且速度差V1小于第三速度阈值,并且在判断距离差S2大于或等于第二距离阈值但速度差V2小于第二速度阈值时判断相邻车道的车辆状态信息,在相邻车道的车辆的速度与距离满足变道要求时,控制车辆执行变道操作,此时还对车辆的转向角速度w1进行获取以及对车辆转向前的车辆行驶速度进行获取,通过判断转向角速度w1和车辆行驶速度来确定是否启动安全气囊点爆,在车辆行驶速度大于低档速度阈值且在转向角速度w1大于角速度阈值时控制车辆执行启动安全气囊点爆的操作,其中低档速度阈值可设定为15km/h;在转向角速度w1小于或等于角速度阈值或者车辆行驶速度小于或等于低档速度阈值时不进行操作;
在相邻车道的车辆的速度与距离不满足变道要求时,控制车辆执行制动操作,此时获取车辆的制动减速度b1,在制动减速度b1大于减速度阈值时,启动安全气囊点爆,从而避免驾驶员及生源撞击到乘员舱内饰硬点,起到安全保护作用,其中,为了保证安全气囊点爆的准确性,在进行安全气囊点爆操作前,还进行判断车辆执行制动操作前的车辆行驶速度进行获取,在车辆行驶速度小于低档速度阈值,即小于15km/h时,即使制动减速度b 1大于减速度阈值,也不启动安全气囊点爆;在制动减速度b1小于或等于减速度阈值时,不启动安全气囊点爆,即不执行操作。
实施例三、
如图1、4所示,本实施例中的技术方案与实施例一中的技术方案基本相同,不同之处在于,在判断距离差S1小于第一距离阈值且速度差V1小于第三速度阈值,以及在距离差S2小于第二距离阈值且速度差V2小于第二速度阈值时,控制车辆执行制动操作,此时获取车辆执行制动操作前的车辆行驶速度以及车辆的制动减速度b1;此时还判断制动操作前的车辆行驶速度是否在低档速度阈值与中档速度阈值的范围内,在车辆行驶速度大于低档速度阈值但小于中档速度阈值时,对后方目标物的类别进行识别,判断后方目标物是否为机动车,即是否为行人或二轮车骑行者。
在制动减速度b1大于减速度阈值且车辆行驶速度大于低档速度阈值时,启动安全气囊点爆,从而避免驾驶员及生源撞击到乘员舱内饰硬点,起到安全保护作用,此时,在识别后方目标物为行人或二轮车骑行者时,除进行制动操作外还启动车辆后部的行人安全气囊,通过行人安全气囊保护两轮车骑行者头部及腿部等部位的安全,减少伤亡;在识别后方目标物为机动车时,不启动行人安全气囊,即不执行操作;另外,本方法在车辆处于静置或倒车时,也能起到安全保护的作用,如在识别到行人或者两轮车骑行者与本车车辆满足上述条件时,启动预警提醒功能或者启动行人安全气囊进行保护。
实施例四:
本实施例中的技术方案与实施例一和实施例二中的技术方案基本相同,不同之处在于,在判断距离差S2小于第二距离阈值但速度差V2大于或等于第二速度阈值,或者在判断距离差S2大于或等于第二距离阈值但速度差V2小于第二速度阈值时,并且在相邻车道的车辆的速度与距离不满足变道要求时,在执行制动操作前还根据距离差S1、距离差S2、速度差V1和速度差V2来获取车辆的加速度值,并根据加速度值控制车辆加速前进直到满足速度差V2小于第二速度差阈值且距离差S2小于第二距离差阈值的条件时控制车辆执行制动操作,尽可能避免发生后部碰撞。
本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
- 一种车辆后部碰撞预警方法
- 一种车辆碰撞预警方法、系统、车辆及存储介质