一种用于新能源汽车钣金加工的七轴机器人及其使用方法
文献发布时间:2023-06-19 10:40:10
技术领域
本发明是一种用于新能源汽车钣金加工的七轴机器人及其使用方法,属于新能源汽车钣金加工用的机械手臂技术领域。
背景技术
机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统。因其独特的操作灵活性, 已在工业装配, 安全防爆等领域得到广泛应用。机械臂是一个复杂系统, 存在着参数摄动、外界干扰及未建模动态等不确定性。因而机械臂的建模模型也存在着不确定性,对于不同的任务, 需要规划机械臂关节空间的运动轨迹,从而级联构成末端位姿。
现有技术中,机械手臂常用的有3-6轴机械手臂,轴数越多,机械手臂活动范围就更为灵活,但是轴数越多,系统越复杂,且轴数越多同步精度也就难以控制,根据以往的3-6轴活动特点进行改进,提供一种7轴机器人手臂,适用范围更广,操作更为简便,现在急需一种用于新能源汽车钣金加工的七轴机器人来解决上述出现的问题。
发明内容
针对现有技术存在的不足,本发明目的是提供一种用于新能源汽车钣金加工的七轴机器人及其使用方法,以解决上述背景技术中提出的问题,本发明结构合理,活动关节构造简单,同步精确,采用同一个控制盒进行控制,操作更为简便,准确度高。
为了实现上述目的,本发明是通过如下的技术方案来实现:一种用于新能源汽车钣金加工的七轴机器人,包括手臂部、连接在手臂部输出端的加工部、控制盒子、以及用于手臂部导向的地轨部,所述手臂部包括横臂、竖臂、转座、转夹和转头,所述转夹转动设置在横臂的输出端,所述转头与转夹转动连接,所述横臂与竖臂上侧转动连接,所述转座上侧铰接连接有转座手臂,所述转座通过转座手臂与竖臂下侧转动连接;
所述加工部包括支撑台,所述支撑台下方安装有用于加工的治具,所述支撑台上侧固定设置有接座,所述支撑台通过接座与所述转头固定连接;
所述地轨部包括滑轨、设置在滑轨上的基座、以及用于驱动基座的驱动马达,所述基座通过螺栓拧合与转座底部固定连接,所述驱动马达设置在基座下侧。
进一步地,所述竖臂上下两侧设有伺服电机,所述竖臂通过伺服电机与横臂和转座手臂连接;所述转座内部设有伺服电机,所述转座通过伺服电机与转座手臂连接;所述横臂靠近转夹的一端设置有伺服电机,所述横臂通过伺服电机与转夹连接;所述转头内部设置有伺服电机,所述转头通过伺服电机与转夹连接。
进一步地,所述转座上铰接连接有电动推杆,且电动推杆的另一端与竖臂下侧铰接连接。
进一步地,所述控制盒子的输入端与外界控制设备电性连接,所述控制盒子的输出端与伺服电机、驱动马达和电动推杆电性连接。
进一步地,所述驱动马达的动力轴上设有齿轮,所述滑轨内壁侧设有齿条,且齿轮与齿条相啮合。
进一步地,所述滑轨的一侧设有用于线缆导向的链条;所述滑轨靠近链条的一侧设有链条托槽,且链条托槽与链条相匹配;所述滑轨的底部等间距地设置有多个枕木。
进一步地,所述转座的底部设置有安装座,所述安装座通过螺栓拧合与基座固定连接;所述转头与接座连接的一侧设有接头,所述接头通过螺栓拧合与接座固定连接。
进一步地,所述链条的一端连接有固定块,所述链条通过固定块与基座固定连接
进一步地,本发明的一种用于新能源汽车钣金加工的七轴机器人的使用方法,包括以下步骤:
A:将基座通过螺栓拧合与转座底部的安装座固定连接,接头通过螺栓拧合与接座固定连接,链条放在链条托槽内,链条的一端通过固定块与基座固定连接;
B:控制盒子的输入端与外界控制设备电性连接,控制盒子的输出端与伺服电机和驱动马达电性连接;
C:控制盒子通过控制驱动马达正转和反转,通过驱动马达上的齿轮头与滑轨内侧的齿条啮合,带动基座左右移动,进而带动整个手臂部和加工部左右移动,完成在滑轨上水平方向的第一个轴向移动;
D:控制盒子通过控制转座内的伺服电机正转和反转,通过转座手臂带动整个手臂部和加工部水平方向旋转角度,完成第二个轴向移动;
E:控制盒子通过控制控制电动推杆的的伸缩,带动转座手臂上下旋转,补偿竖臂的高度,完成第三个轴向移动;
F:控制盒子通过控制竖臂下侧的伺服电机正转和反转,带动竖臂和横臂旋转,调节竖臂的使用高度或臂展长度,完成第四个轴向移动;
G:控制盒子通过控制竖臂上侧的伺服电机正转和反转,带动横臂旋转,带动横臂和加工部旋转,完成第五个轴向移动;
H:控制盒子通过控制横臂输出端的伺服电机正转和反转,带动转夹旋转,带动转头和加工部旋转,完成第六个轴向移动;
I:控制盒子通过控制转头内的伺服电机正转和反转,带动转头沿转夹旋转,进而带动加工部旋转,完成第七个轴向移动。
本发明的有益效果:本发明的一种用于新能源汽车钣金加工的七轴机器人在使用时,控制盒子通过控制驱动马达正转和反转,通过驱动马达上的齿轮头与滑轨内侧的齿条啮合,带动基座左右移动,进而带动整个手臂部和加工部左右移动,完成在滑轨上水平方向的第一个轴向移动;
控制盒子通过控制转座内的伺服电机正转和反转,通过转座手臂带动整个手臂部和加工部水平方向旋转角度,完成第二个轴向移动;
控制盒子通过控制控制电动推杆的的伸缩,带动转座手臂上下旋转,补偿竖臂的高度,完成第三个轴向移动;
控制盒子通过控制竖臂下侧的伺服电机正转和反转,带动竖臂和横臂旋转,调节竖臂的使用高度或臂展长度,完成第四个轴向移动;
控制盒子通过控制竖臂上侧的伺服电机正转和反转,带动横臂旋转,带动横臂和加工部旋转,完成第五个轴向移动;
控制盒子通过控制横臂输出端的伺服电机正转和反转,带动转夹旋转,带动转头和加工部旋转,完成第六个轴向移动;
控制盒子通过控制转头内的伺服电机正转和反转,带动转头沿转夹旋转,进而带动加工部旋转,完成第七个轴向移动;
本发明的每个活动关节构造简单,同步精确,采用同一个控制盒子进行控制,操作更为简便,准确度高。
附图说明
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
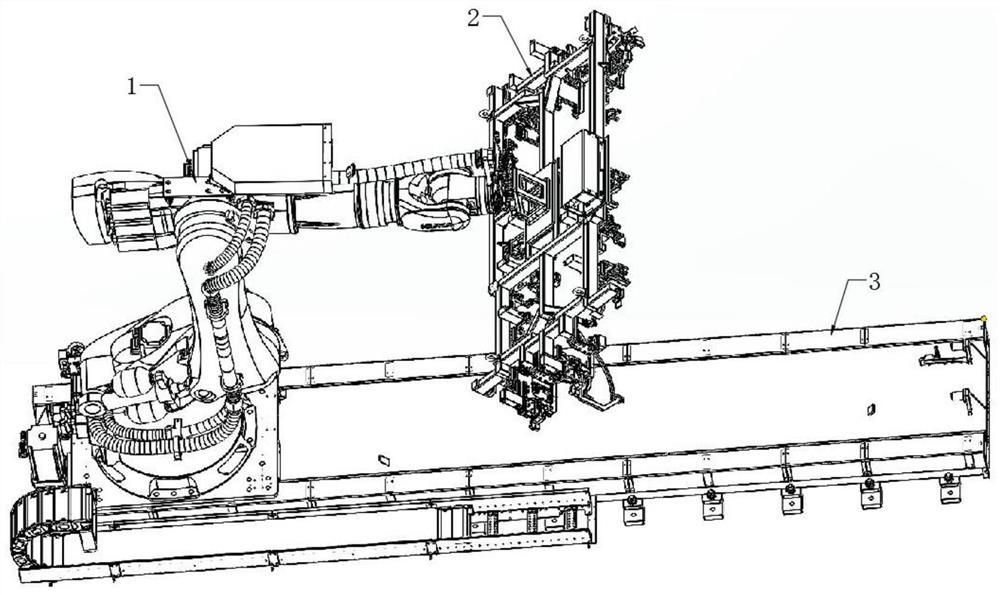
图1为本发明一种用于新能源汽车钣金加工的七轴机器人的整体结构示意图;
图2为本发明一种用于新能源汽车钣金加工的七轴机器人之手臂部的结构示意图;
图3为本发明一种用于新能源汽车钣金加工的七轴机器人之手臂部的结构示意图;
图4为本发明一种用于新能源汽车钣金加工的七轴机器人之加工部的结构示意图;
图5为本发明一种用于新能源汽车钣金加工的七轴机器人之地轨部的结构示意图;
图6为本发明一种用于新能源汽车钣金加工的七轴机器人中地轨部的结构示意图;
图中:1手臂部、11横臂、12转夹、13转头、131接头、14竖臂、15转座手臂、16转座、161安装座、2加工部、21接座、22支撑台、3地轨部、31链条、311固定块、32基座、321驱动马达、33滑轨、34链条托槽。
具体实施方式
为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
请参阅图1-图6,本发明提供一种技术方案:一种用于新能源汽车钣金加工的七轴机器人,包括手臂部1、连接在手臂部1输出端的加工部2、控制盒子5、以及用于手臂部1导向的地轨部3,手臂部1包括横臂11、竖臂14、转座16、转夹12和转头13,转夹12转动设置在横臂11的输出端,转头13与转夹12转动连接,横臂11与竖臂14上侧转动连接,转座16上侧铰接连接有转座16手臂15,转座16通过转座16手臂15与竖臂14下侧转动连接;
本发明的加工部2包括支撑台22,支撑台22下方安装有用于加工的治具,支撑台22上侧固定设置有接座21,支撑台22通过接座21与转头13固定连接,支撑台22用于对治具进行安装固定;
本发明的地轨部3包括滑轨33、设置在滑轨33上的基座32、以及用于驱动基座32的驱动马达321,基座32通过螺栓拧合与转座16底部固定连接,驱动马达321设置在基座32下侧,用于带动手臂部1和加工部2左右平移移动。
本发明的竖臂14上下两侧设有伺服电机,竖臂14通过伺服电机与横臂11和转座16手臂15连接,通过控制竖臂14下侧的伺服电机正转和反转,带动竖臂14和横臂11旋转,调节竖臂14的使用高度或臂展长度;
转座16内部设有伺服电机,转座16通过伺服电机与转座16手臂15连接,通过控制转座16内的伺服电机正转和反转,通过转座16手臂15带动整个手臂部1和加工部2水平方向旋转角度;
横臂11靠近转夹12的一端设置有伺服电机,横臂11通过伺服电机与转夹12连接,通过控制横臂11输出端的伺服电机正转和反转,带动转夹12旋转,带动转头13和加工部2旋转;
转座16上铰接连接有电动推杆17,且电动推杆17的另一端与竖臂14下侧铰接连接,通过控制电动推杆17的的伸缩,带动转座16手臂15上下旋转,补偿竖臂14的高度;
转头13内部设置有伺服电机,转头13通过伺服电机与转夹12连接,通过控制转头13内的伺服电机正转和反转,带动转头13沿转夹12旋转,进而带动加工部2旋转;
驱动马达321的动力轴上设有齿轮,滑轨33内壁侧设有齿条,且齿轮与齿条相啮合,通过控制驱动马达321正转和反转,通过驱动马达321上的齿轮头与滑轨33内侧的齿条啮合,带动基座32左右移动,进而带动整个手臂部1和加工部2左右移动。
本发明的横臂11上侧设置有控制盒子5,控制盒子5的输入端与外界控制设备电性连接,控制盒子5的输出端与伺服电机和驱动马达321电性连接,通过控制盒子5独立控制多个伺服电机和驱动马达321,防止多系统控制造成的不同步问题。
本发明的滑轨33的一侧设有用于线缆导向的链条31;滑轨33靠近链条31的一侧设有链条托槽34,且链条托槽34与链条31相匹配;链条31的一端连接有固定块311,链条31通过固定块311与基座32固定连接,线缆安装在链条31内,链条31用于手臂部1沿滑轨33左右移动时对线缆进行保护;滑轨33的底部等间距地设置有多个枕木331。
本发明的一种用于新能源汽车钣金加工的七轴机器人的一种使用方法,包括以下步骤:
A:将基座32通过螺栓拧合与转座16底部的安装座161固定连接,接头131通过螺栓拧合与接座21固定连接,链条31放在链条托槽34内,链条31的一端通过固定块311与基座32固定连接;
B:控制盒子5的输入端与外界控制设备电性连接,控制盒子5的输出端与伺服电机和驱动马达321电性连接;
C:控制盒子5通过控制驱动马达321正转和反转,通过驱动马达321上的齿轮头与滑轨33内侧的齿条啮合,带动基座32左右移动,进而带动整个手臂部1和加工部2左右移动,完成在滑轨33上水平方向的第一个轴向移动;
D:控制盒子5通过控制转座16内的伺服电机正转和反转,通过转座16手臂15带动整个手臂部1和加工部2水平方向旋转角度,完成第二个轴向移动;
E:控制盒子5通过控制控制电动推杆17的的伸缩,带动转座16手臂15上下旋转,补偿竖臂14的高度,完成第三个轴向移动;
F:控制盒子5通过控制竖臂14下侧的伺服电机正转和反转,带动竖臂14和横臂11旋转,调节竖臂14的使用高度或臂展长度,完成第四个轴向移动;
G:控制盒子5通过控制竖臂14上侧的伺服电机正转和反转,带动横臂11旋转,带动横臂11和加工部2旋转,完成第五个轴向移动;
H:控制盒子5通过控制横臂11输出端的伺服电机正转和反转,带动转夹12旋转,带动转头13和加工部2旋转,完成第六个轴向移动;
I:控制盒子5通过控制转头13内的伺服电机正转和反转,带动转头13沿转夹12旋转,进而带动加工部2旋转,完成第七个轴向移动。
以上显示和描述了本发明的基本原理和主要特征和本发明的优点,对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 一种用于新能源汽车钣金加工的七轴机器人及其使用方法
- 一种用于机器人第七轴地轨的连接机构及连接方法