一种基于图像识别的压裂液悬砂能力评价方法
文献发布时间:2023-06-19 10:41:48
技术领域
本发明涉及油气开采技术领域,尤其是一种基于图像识别的压裂液悬砂能力评价方法。
背景技术
目前国内外在开发高、中、低渗透以及特低渗透油藏过程中,形成了很多经济、有效的工艺技术。由于超低渗透油藏的岩性更致密(渗透率在0.5mD以下)、孔喉更细微、应力敏感性更强,出现注水井欠注问题也更难解决,因此超低渗透油藏的高效开发一直以来是石油开发的世界级难题。
压裂是注水井增注的常用措施之一,可以有效提高注水井注入能力提高油田产能效益。压裂液是施工所用工作液,不同的压裂液类型起不同作用,其中携砂液用于携带支撑剂进入裂缝,支撑裂缝提高地层导流能力。压裂液的携砂性能是压裂液配方优化的重要指标之一,常用的方法是动、静态悬砂实验。静态悬砂实验通过记录不同砂液比(10%,20%,30%,50%,75%,100%)下支撑剂全部沉降至量筒底部所需时间,推算沉降速度来表征携砂液悬砂能力,沉砂速度越小则悬砂能力越强。但是对于高悬砂能力携砂液来说完全沉降时间往往较长,沉降过程中沉降体积通过估测得到,不够准确。例如,刘建坤对中高粘度压裂液进行悬砂实验,30/50目的支撑剂在25%砂比下充分沉降后,有12.0%~13.1%的支撑剂沉降,充分沉降时间达到1580min。参见文献,刘建坤,吴峙颖,吴春方等.压裂液悬砂及支撑剂沉降机理实验研究[J].钻井液与完井液,2019,36(03):378-383。
发明内容
本发明的目的是针对现有的悬砂实验通过记录支撑剂全部沉降至量筒底部所需时间来表征携砂液悬砂能力,这种方法对于高悬砂能力携砂液来说完全沉降时间往往较长,沉降过程中沉降体积通过估测得到,不够准确的问题,提供一种基于图像识别的压裂液悬砂能力评价方法。
本发明提供的基于图像识别的压裂液悬砂能力评价方法,步骤如下:
S1、配制携砂液
在室温下,携砂液倒入搅拌器中,调节搅拌器的转速至液体形成的漩涡可以见到搅拌器桨叶中轴顶端为止,保持搅拌器恒速转动,按特定的砂液比加入支撑剂,5min后停止搅拌,把含支撑剂的携砂液迅速倒入量筒中,观察混砂均匀程度和悬砂效果。
S2、根据支撑剂沉降情况选择拍照时机,借助高清摄像机或照相机获取多帧高质量图像资料。
S3、图像处理,具体包括如下步骤:
S31、灰度图像获取:图像处理前进行灰度化处理减少后续计算量,采用加权平均值法,对每个像素点的颜色分量R、G、B赋不同权值进行加权平均运算。
f(i,j)=0.299R(i,j)+0.587G(i,j)+0.114B(i,j)
其中,R(i,j)、G(i,j)、B(i,j)为彩色图像中三颜色通道的像素值,f(i,j)为灰度化后输出的图像。
灰度变换:把图像每个像素点的灰度值通过一定变换关系进行处理,提高图像对比度,动态范围增大,改变灰度细节。
g(i,j)=T[f(i,j)]
其中f(i,j)为原始图像的灰度值,g(i,j)表示处理后的图像灰度值,T为进行灰度处理选取的变换函数,根据图像特征和目标需求选择函数映射。
需要对目标兴趣区(支撑剂)进行増强处理,相对抑制非兴趣的部位。采取分段线性变换的方法进行拉伸,分段线性变换就是通过把图像灰度范围分割成若干段,在每一小段上进行线性变换。
去噪:获取的图像会存在不同程度的噪声,表现为不规律的杂质,对后续支撑剂识别、统计造成影响,需要在保留支撑剂边缘信息的前提下消除噪声保留图像细节。采用双重滤波法,即中值滤波与双边滤波相结合。
形态学处理:图像采集过程中难免出现环境光照不均匀,杂质干扰等情况,图像内部出现孔洞,颗粒边缘不平滑等,需要对图像进行形态化处理。闭运算填充颗粒图像,开运算消除孤立噪点、在连接处分离物体,通过形态化处理平滑边界又不明显改变图像面积。
S32、图像二值化
首先,设定阈值获得二值图像
设定阈值,通过判断每个像素点灰度值f(i,j)与阈值关系,转换为只有0,1的二值图像,计算量更少,速度更快。
f(i,j)为处理前图像,D(i,j)是处理后二值图像,ΔT是分割阈值。
然后,获取阈值:阈值用最大方差阈值分割法(Otsu法)确定。
S33、目标提取
首先,图像分割
沉砂过程中支撑剂出现聚集趋势,图像上易出现支撑剂颗粒黏连现象,需要进行目标分割后再提取信息。使用基于距离变换的分水岭算法利用OpenCV对二值化图像进行分割。
然后,进行数量统计:
将图像划分为m*n个子区域,每个子区域采用基于连通域的回溯标记算法对支撑剂颗粒进行计数,计数结果记为X。
S4、数据分析
每个子区域支撑剂颗粒数量为X
其标准差为:
混合均匀度为
混合均匀度越小说明支撑剂分散越均匀,携砂液的悬砂能力越强。
与现有技术相比,本发明的有益之处在于:
本发明将图像识别技术与携砂液性能评价方法结合,利用图像处理技术识别支撑剂颗粒,同时引入混合均匀度评价均匀程度,进而评价悬砂能力,提高评价结果精确度,缩短实验时间。该方法能快速准确评价压裂液悬砂能力是否满足工艺设计需要,保证压裂施工效果。
本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
附图说明
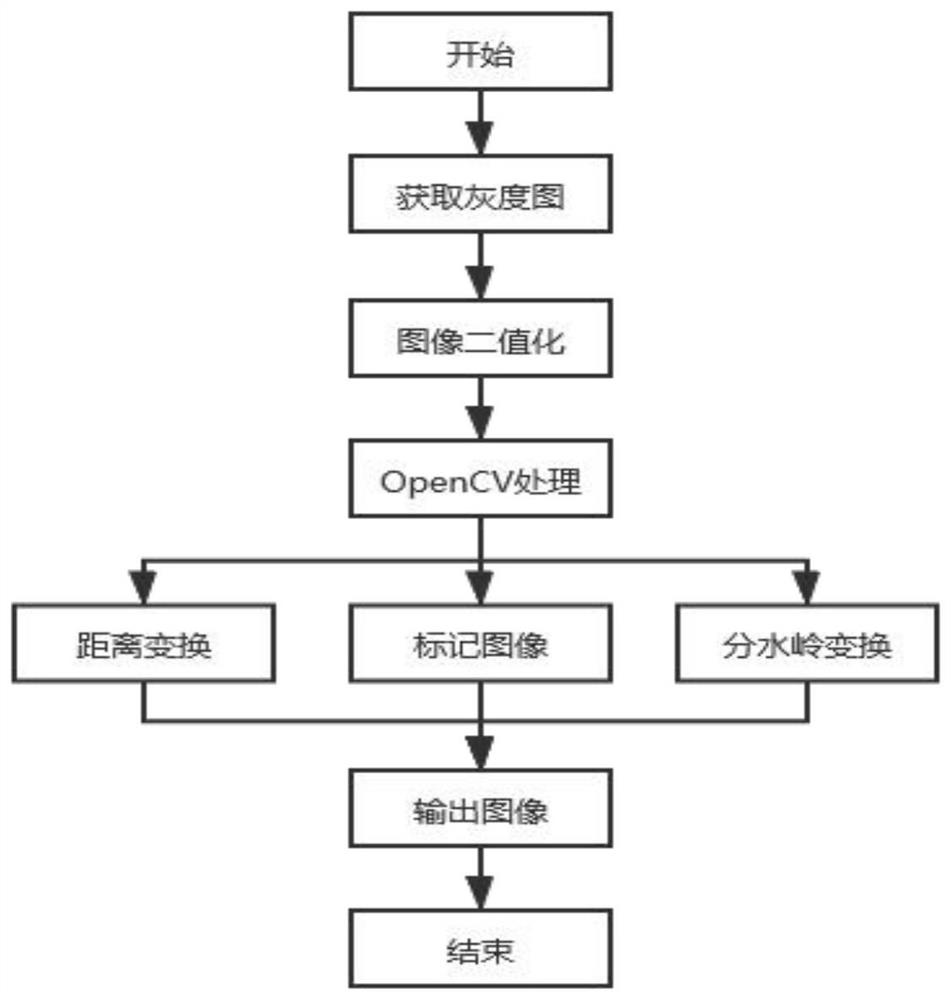
图1、图像分割流程图。
具体实施方式
以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
本发明提供的基于图像识别的压裂液悬砂能力评价方法,步骤如下:
S1、配制携砂液
分别配制砂液比为10%、20%,30%,50%,75%,100%的含陶粒携砂液。在室温下,量取500mL携砂液倒入搅拌器中,调节搅拌器的转速至液体形成的漩涡可以见到搅拌器桨叶中轴顶端为止,保持搅拌器恒速转动,按特定砂液比加入陶粒(0.425mm~0.850mm),5min后停止搅拌,把含陶粒携砂液迅速倒入1000mL的量筒中,观察混砂均匀程度和悬砂效果。
S2、获取图像
借助高清摄像机或照相机获取多帧高质量图像资料。根据支撑剂沉降情况选择拍照时机,例如可在目测观察支撑剂无明显运动时可进行采集。采集过程尽量保持环境条件不变,光源稳定,光照充足、均匀,拍摄角度、距离合适,图片背景与支撑剂有明显对比度。
S3、图像处理,具体步骤如下:
S31、灰度图像获取
S311、灰度化
图像处理前进行灰度化处理减少后续计算量,采用加权平均值法,对每个像素点的颜色分量R、G、B赋不同权值进行加权平均运算。
f(i,j)=0.299R(i,j)+0.587G(i,j)+0.114B(i,j)
其中,R(i,j)、G(i,j)、B(i,j)为彩色图像中三颜色通道的像素值,f(i,j)为灰度化后输出的图像。
S312、图像增强:图像可能因曝光不足或过量、支撑剂相对运动、设备问题等导致画质下降,对结果造成干扰,需要根据需求突出目标兴趣区(支撑剂),提高对比度,使图像更清晰保证结果准确度。具体操作如下:
(1)灰度变换
把图像每个像素点的灰度值通过一定变换关系进行处理,提高图像对比度,动态范围增大,改变灰度细节。
g(i,j)=T[f(i,j)]
其中,f(i,j)为原始图像的灰度值,g(i,j)表示处理后的图像灰度值,T为进行灰度处理选取的变换函数,根据图像特征和目标需求选择函数映射。灰度变换一般分为比例线性变换、分段变换和非线性变换。
需要对目标兴趣区(支撑剂)进行増强处理,相对抑制非兴趣的部位。采取分段线性变换的方法进行拉伸,分段线性变换就是通过把图像灰度范围分割成若干段,在每一小段上进行线性变换。
(2)去噪
获取的图像会存在不同程度的噪声,表现为不规律的杂质,对后续支撑剂识别、统计造成影响,需要在保留支撑剂边缘信息的前提下消除噪声保留图像细节。采用双重滤波法,即中值滤波与双边滤波相结合。
先进行中值滤波去除椒盐噪声、随机噪声等,表达式:
g(i,j)=med{f(i-k,j-l)|k,l∈W}
其中f(i,j)为处理前图像,g(i,j)为处理后图像,w为模板,模板形状有线性、十字形、圆形、方形等。
然后进行双边滤波,表达式:
其中,w(i,j,k,l)为空域核与值域核的乘积,
f(k,l)是模板中心点处像素值。
(3)形态学处理
图像采集过程中难免出现环境光照不均匀,杂质干扰等情况,图像内部出现孔洞,颗粒边缘不平滑等,需要对图像进行形态化处理。
闭运算填充颗粒图像,开运算消除孤立噪点、在连接处分离物体,通过形态化处理平滑边界又不明显改变图像面积。
S32、图像二值化,具有操作如下:
S321、设定阈值获得二值图像
设定阈值,通过判断每个像素点灰度值f(i,j)与阈值关系,转换为只有0,1的二值图像,计算量更少,速度更快。
f(i,j)为处理前图像,D(i,j)是处理后二值图像,ΔT是分割阈值
S322、获取阈值
阈值可用最大方差阈值分割法(Otsu法)确定。Otsu法基于目标兴趣区与背景区的像素值方差达到最大同时使目标与目标间的像素值方差达到最小的准则自动计算阈值T,确定图像中的该像素点是属于目标区(支撑剂颗粒)还是背景区,其类间方差为:
δ=P
其中δ为类间方差,P
S33、目标提取
S331、图像分割
沉砂过程中支撑剂出现聚集趋势,图像上易出现支撑剂颗粒黏连现象,需要进行目标分割后再提取信息。典型的图像分割方法有基于区域的分割方法、基于边缘检测的分割方法、基于阈值的分割方法等。
使用基于距离变换的分水岭算法利用OpenCV对二值化图像进行分割。使用函数如下:
A、OpenCV中,函数cv2.distanceTransform()用于计算图像中每一个非零点像素与其最近的零点像素之间的距离,输出的是保存每一个非零点与最近零点的距离信息,经过运算细化轮廓,获取图像前景。
B、使用cv2.connectedComponents()对确定为背景、前景以及未知区域进行标记。将所有标记加1,让所有未知区域记为0。
C、使用分水岭算法cv2.watershed()进行图像分割,边界标记为-1。
图像分割流程图见图1。
S332、数量统计
将图像划分为m*n个子区域,每个子区域采用基于连通域的回溯标记算法对支撑剂颗粒进行计数,计数结果记为X。
S4、数据分析
每个子区域支撑剂颗粒数量为X
其标准差为:
混合均匀度为:
混合均匀度越小说明支撑剂分散越均匀,携砂液的悬砂能力越强。
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容作出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
- 一种基于图像识别的压裂液悬砂能力评价方法
- 一种基于图像识别的压裂液悬砂能力评价方法