一种四轴冗余惯导系统的误差标定方法
文献发布时间:2023-06-19 10:46:31
技术领域
本发明涉及捷联式惯性导航误差标定技术领域,尤其涉及一种四轴冗余惯导系统的误差标定方法,适用于标定四轴斜置方案的冗余惯导系统的误差参数,特别适合要求在标定时间短、转台精度低的情况下实现四轴冗余惯导误差标定的应用场合。
背景技术
传统的惯导系统通过正交安装的三轴陀螺仪和加速度计来测量载体相对于空间的角速度和加速度,并基于航位推算原理给出载体实时的位置、速度和姿态信息。惯导系统的导航精度很大程度上取决于陀螺和加速度计的精度,因此惯导系统的误差参数标定是实现其高精度导航的重要前提。
惯性导航系统作为舰船导航的核心设备,不仅要求有较高的精度指标,还必须具备较高的工作可靠性,才能确保系统在恶劣的舰载环境条件下全寿命可靠地工作。在传统的三轴正交惯导基础上,从增加体积小、投入少、增加功耗小、结构设计易于实现等方面综合考虑,选择在经典捷联惯导系统的基础上增加一个加速度计和一个陀螺仪,以最低的冗余数量组成四轴冗余惯导系统,可将系统的MTBF(Mean Time Between Failure平均故障间隔时间)提升75%。
由于四轴冗余惯性系统特殊的组成特点和结构安装形式,它的标定方法有别于其他器件。现有的文献中对冗余惯导的误差标定还是传统的多位置翻滚法,该方法利用多位置对消原理,通过采集惯性器件原始数据解析计算各误差项。但是对于四轴冗余惯导系统来说,通过翻滚法标定斜置轴的相关误差需要增加更多的翻滚位置,延长了标定时间,而且转台控制复杂、对转台的转位精度要求较高。因此针对四轴冗余惯导系统,需要研究一种能够在标定时间短、转台精度低的情况下实现误差参数的标定方法。
发明内容
有鉴于此,本发明提供了一种四轴冗余惯导系统的误差标定方法,在确保误差参数标定精度的情况下,标定效率比传统方法显著提高,同时对转台的精度要求降低,从而提高了该标定方法的适用性。
本发明通过预先设计的旋转策略控制三轴转台框架的转动,从而激励出各项误差,然后采用两阶段误差标定思路,先使用卡尔曼滤波算法结合导航误差对正交陀螺仪、正交加速度计的误差进行标定和补偿,然后使用递推最小二乘算法对斜置陀螺、加速度计的误差进行标定和补偿,从而实现四轴冗余惯导系统所有的误差参数标定。
本发明公开了一种四轴冗余惯导系统的误差标定方法,具体包括以下步骤:
S1,将四轴冗余惯导系统安装在三轴转台上;
S2,调整四轴冗余惯导系统的安装角度;
S3,三轴转台带动所述四轴冗余惯导系统按照设定的旋转路径进行转动,得到整个转动过程中四轴冗余惯导系统的速度误差和位置误差及其陀螺仪和加速度计的实际输出值;
所述陀螺仪包括正交陀螺仪和斜置陀螺仪,所述加速度计包括正交加速度计和斜置加速度计;
S4,根据四轴冗余惯导系统的速度误差和位置误差及其正交陀螺仪和正交加速度计的实际输出值计算出正交陀螺仪和正交加速度计补偿后的输出值;
S5,根据正交陀螺仪和正交加速度计补偿后的输出值、斜置陀螺仪和斜置加速度计的实际输出值,利用递推最小二乘算法计算出斜置陀螺仪和斜置加速度计标定后的输出值。
优选地,所述设定的旋转路径为:
首先,三轴转台绕其内框进行连续正反转,中框和外框均锁定在 0°;
然后,三轴转台绕其中框进行连续正反转,内框和外框均锁定在 0°;
最后,三轴转台先绕其内框转动90°,再绕其中框连续正反转。
优选地,三轴转台每次正反转时均正反转动5次。
优选地,所述步骤S4中根据四轴冗余惯导系统的速度误差和位置误差及其陀螺仪和加速度计的实际输出值计算出正交陀螺仪和正交加速度计补偿后的输出值的具体步骤为:
首先,将四轴冗余惯导系统的速度误差和位置误差作为量测变量,将正交陀螺仪和正交加速度计的误差参数作为状态变量,利用卡尔曼滤波算法对状态变量进行最优估计,得到正交陀螺仪和正交加速度计的误差参数;
然后,将正交陀螺仪和正交加速度计的误差参数分别补偿到其各自对应的实际输出值中,得到正交陀螺仪和正交加速度计补偿后的输出值。
优选地,所述正交陀螺仪和正交加速度计的误差参数包括正交陀螺仪的漂移、正交加速度计的零偏、正交陀螺仪的刻度系数误差、正交加速度计的刻度系数误差、正交陀螺仪的安装误差、正交加速度计的安装误差。
本发明的有益效果是:
1、本发明提出了一种更加快速的四轴冗余惯导系统误差标定方法,该标定方法不需要专门增加针对斜置轴的正反旋转和翻滚转位,只要求三轴转台相对于正交安装的陀螺和加速度计进行旋转,减少了误差标定的时间,在保证标定方法准确性的同时,显著提高了标定效率。
2、本发明提出的四轴冗余惯导系统误差标定方法,无论是针对正交陀螺仪、正交加速度计的误差标定,还是斜置陀螺仪、斜置加速度计的误差标定,都使用了系统级误差标定的思想,该方法中三轴转台的旋转控制简单,而且转台的转速、转位精度要求不高,从而提升了该误差标定方法的适用性。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
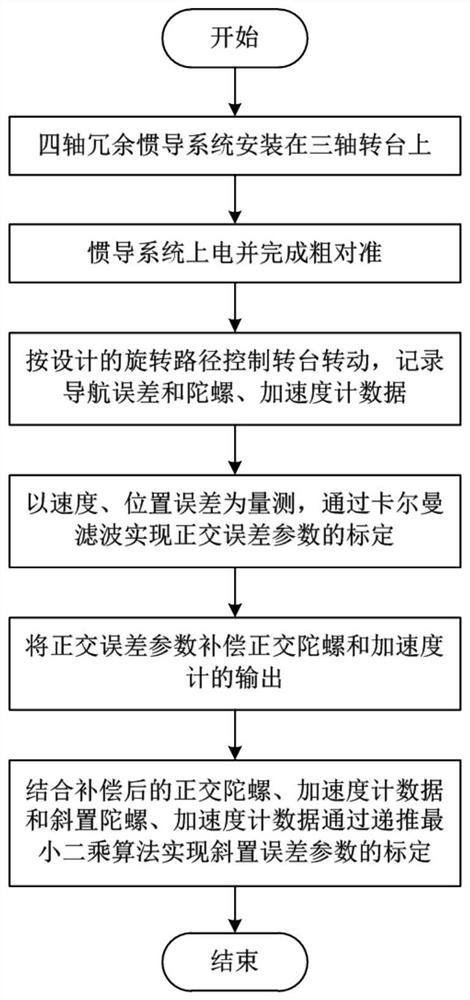
图1为本发明一种四轴冗余惯导系统误差标定方法实施的流程图;
图2为本发明具体实施例的四轴冗余惯导系统正交陀螺和加速度计安装偏角示意图;
图3为本发明具体实施例的四轴冗余惯导统斜置陀螺和加速度计安装偏角示意图;
图4为本发明具体实施例的三轴转台框架旋转路径示意图;
图5为本发明具体实施例的正交陀螺和加速度计的漂移和零偏标定收敛曲线;
图6为本发明具体实施例的正交陀螺和加速度计刻度系数误差标定收敛曲线;
图7为本发明具体实施例的正交陀螺和加速度计安装偏角标定收敛曲线;
图8为本发明具体实施例的斜置陀螺误差标定收敛曲线;
图9为本发明具体实施例的斜置加速度计误差标定收敛曲线。
具体实施方式
为了更好的理解本发明的技术方案,下面结合附图对本发明实施例进行详细描述。
应当明确,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
下面通过具体的实施例并结合附图对本申请做进一步的详细描述。
本发明公开了一种四轴冗余惯导系统的误差标定方法,该方法通过预先设计的旋转路径控制三轴转台框架的转动,从而激励出各项误差,然后采用两阶段误差标定思路,先使用卡尔曼滤波算法结合导航误差对正交陀螺仪、正交加速度计的误差进行标定和补偿,然后使用递推最小二乘算法对斜置陀螺、加速度计的误差进行标定和补偿,从而实现四轴冗余惯导系统所有的误差参数标定。
下面对本发明的原理作如下解释:
在冗余惯导系统中,影响冗余惯导系统性能的误差参数包括陀螺漂移、加速度计零偏、陀螺与加速度计的刻度系数误差,以及陀螺和加速度计的安装偏角等,因此这些误差都需要准确标定。
考虑到四轴冗余惯导系统的斜置轴较为特殊,在误差标定过程中可以分阶段进行,即先标定3个正交轴的陀螺和加速度计相关误差,最后再标定斜置轴的相关误差。
陀螺漂移、加速度计零偏、刻度系数误差的定义较为直观,而为了描述正交轴陀螺和加速度计的,需要先定义几个坐标系:
陀螺坐标系(g系):三个正交陀螺的敏感轴确定的坐标系;
加计坐标系(a系):三个正交加速度计的敏感轴确定的坐标系;
载体坐标系(b系):x
因此,冗余惯导中正交陀螺、加速度计的安装偏角即可用b系与g系(或a系)的偏差来表示,如附图2所示,陀螺的安装偏角包括S
冗余惯导系统的误差标定是在静基座环境下,在基于三轴转台进行的,因此导航误差方程使用惯导系统静基座误差方程,如下所示:
表示ε
将式(2)、(3)代入式(1)并展开,可得到卡尔曼滤波算法状态方程中对应各元素分量,即式(15)~(19)。
为了确保四轴冗余惯导正交陀螺仪和正交加速度计的各项误差都能得到较好的估计,需要对步骤S3中设计的三轴转台的旋转路径进行可观测性分析。
考虑到冗余惯导系统在标定过程中存在转动,因此常规的线性时不变系统的可观测性分析方法并不适用。针对线性时变系统的可观测性分析,常用的方法包括分段线性定常系统方法(piece-wise constant system,PWCS)。
PWCS方法主要是计算SOM矩阵(Striping observability matrix)。
其中,在每个时间间隔内系统的可观测性矩阵为
其中i=1,2,...r,n为系统的维数,r为离散时间段的总数。
如果Q
在完成冗余惯导系统的正交陀螺仪和正交加速度计的误差标定后即可对斜置陀螺和加速度计的误差进行标定。斜置轴的安装误差如附图3所示,其中δ是斜置陀螺仪/斜置加速度计与水平方向的安装误差,σ是斜置陀螺仪/斜置加速度计与垂直方向的安装误差,α是理想的斜置角,
当斜置陀螺和加速度计存在漂移(零偏)、刻度系数误差和安装偏角时,其输出可表示如下:
其中
因此,可将式(6)和(7)进行如下改写:
因此基于式(8)和式(9),以斜置陀螺和加速度计的输出作为量测量,将补偿后的正交陀螺和加速度计构建量测矩阵,即可通过递推最小二乘算法实现标定斜置陀螺和加速度计的相关误差,进而完成四轴冗余惯导系统中所有的陀螺仪和加速度计的误差参数标定。
具体地,本发明的四轴冗余惯导系统的误差标定方法,包括以下步骤:
S1,将四轴冗余惯导系统安装在三轴转台上。
S2,将四轴冗余惯导系统通电,在三轴状态锁定的状态下对四轴冗余惯导系统进行粗对准,即调整四轴冗余惯导系统的安装角度。
S3,三轴转台带动所述四轴冗余惯导系统按照设定的旋转路径进行转动,得到整个转动过程中四轴冗余惯导系统的速度误差和位置误差及其陀螺仪和加速度计的实际输出值(δV
图4给出了本发明具体应用的三轴转台的旋转路径,其中包括了 3个子步骤:
首先,三轴转台绕其内框进行连续正反转,中框和外框均锁定在 0°;
然后,三轴转台绕其中框进行连续正反转,内框和外框均锁定在 0°;
最后,三轴转台先绕其内框转动90°,再绕其中框连续正反转。
三轴转台转动的角速度为6°/s,上述旋转路径中每个子步骤均进行5次正反转,整体耗时约32分钟。
所述陀螺仪包括正交陀螺仪和斜置陀螺仪,所述加速度计包括正交加速度计和斜置加速度计。正交陀螺仪和正交加速度计分别有三个,斜置陀螺仪有一个,斜置加速度计有一个。
S4,根据四轴冗余惯导系统的速度误差和位置误差及其正交陀螺仪和正交加速度计的实际输出值计算出正交陀螺仪和正交加速度计补偿后的输出值(
首先,将四轴冗余惯导系统的速度误差和位置误差作为量测变量,将正交陀螺仪和正交加速度计的误差参数作为状态变量,利用卡尔曼滤波算法对状态变量进行最优估计,得到正交陀螺仪和正交加速度计的误差参数。正交陀螺仪和正交加速度计的误差参数包括正交陀螺仪的漂移、正交加速度计的零偏、正交陀螺仪的刻度系数误差、正交加速度计的刻度系数误差、正交陀螺仪的安装误差、正交加速度计的安装误差。
然后,将正交陀螺仪和正交加速度计的误差参数分别补偿到其各自对应的实际输出值中,得到正交陀螺仪和正交加速度计补偿后的输出值。
具体地,由于误差标定在静基座环境下进行,因此速度输出即为速度误差,位置输出扣除初值即为位置误差,由此即可得到步骤S4 中的量测变量为:
Z=[δV
其中δV
同时,步骤S4中的状态变量选取如下:
其中φ
在此基础上建立基于卡尔曼滤波的标定模型:
其中W与V分别为系统噪声与量测噪声,二者均为白噪声。F为系统矩阵,H为量测矩阵,二者的表达式分别为:
H=[0
式(13)和式(14)中0表示零元素,I
式(15)~(19)中
在此基础上对式(12)所示的模型离散化:
其中Φ
其中R
进一步的,步骤S4中的补偿模型如下:
其中
图5、图6、图7给出了本发明具体应用的四轴冗余惯导系统在误差标定第一阶段,即使用卡尔曼滤波算法得到的正交陀螺仪、正交加速度计的误差标定收敛曲线,其中图5给出了正交陀螺仪漂移、正交加速度计的零偏曲线;图6给出了正交陀螺仪、正交加速度计的刻度系数误差曲线,图7给出了正交陀螺仪、正交加速度计的安装偏角曲线。
S5,根据正交陀螺仪和正交加速度计补偿后的输出值、斜置陀螺仪和斜置加速度计的实际输出值,利用递推最小二乘算法计算出斜置陀螺仪和斜置加速度计标定后的输出值。
具体地,斜置陀螺和加速度计的量测模型如下:
其中Z
通过递推最小二乘算法实现对状态变量X
其中P
在此基础上即可分离斜置陀螺和加速度计的剩余误差:
其中△k
图8、图9给出了本发明具体应用的四轴冗余惯导系统在误差标定第二阶段,即使用递推最小二乘得到的斜置陀螺仪、斜置加速度计的误差标定收敛曲线,其中图8给出了斜置陀螺仪的漂移和3个等效斜置角曲线,图9给出了斜置加速度计的零偏和3个等效斜置角曲线。
为了进一步验证该标定方法的准确性,可以结合三轴转台利用传统的多位置翻滚标定方法对同一套四轴冗余惯导系统进行误差标定,将得到的标定结果与标定方法进行对比,如下表所示:
表1四轴冗余惯导系统的标定结果对比表
根据表1可知,本标定方法与传动方法得到的陀螺漂移相差小于0.01°/h,加速度计零偏相差小于30ug,陀螺刻度系数误差相差小于5ppm,加速度计刻度系数误差相差小于10ppm,陀螺安装偏角相差小于0.1′,加速度计安装偏角相差小于0.3′,斜置角相差小于0.1′,因此可以认为两种方法标定结果吻合,间接证明了本发明提出的标定方法的准确性。然而本方法的标定时间为32 分钟,传统多位置翻滚法的标定时间是53分钟,可见本方法的标定效率相比于传统方法大幅提升。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明保护的范围之内。
- 一种四轴冗余惯导系统的误差标定方法
- 一种斜置冗余惯导系统标定误差模型建模方法