一种列车障碍物探测线路数据生成方法及系统
文献发布时间:2023-06-19 10:48:02
技术领域
本发明涉及轨道交通领域,更具体地说,它涉及一种列车障碍物探测线路数据生成方法及系统。
背景技术
轨道交通列车驾驶由原来的有人驾驶阶段发展到无人驾驶阶段,过去司机人眼观察线路的工作必须由传感系统代替,在这个背景下,障碍物探测已经成为列车装备的一个配置项。
障碍物探测依赖于线路场景,故如何快速有效、精确地生成线路数字坐标是一项必须要完成的工作。
线路数据目前有多种方法生成:例如使用GPS和使用点云数据的SLAM算法,GPS生成的线路受GPS定位精度和GPS信号的影响,一般误差比较大,一些场景信号遮挡还没有办法生成,所以不便于实际使用;SLAM方法对专业人员的技能要求很高,而且需要专业设备,在隧道等有些环境下制作复杂,使用难度高,尤其是,在一些场景中是不是能使用RTK-SLAM方法的,所以线路数据生成就成为了难题。
发明内容
本发明的目的是提供一种列车障碍物探测线路数据生成方法及系统,方法简单,能够快速生成,更加实用,计算的精度也非常高,并且对场景的要求,对设备的要求都不高,一般工程技术人员就可以完成,更加合适于实际应用。
本发明的上述技术目的是通过以下技术方案得以实现的:一种列车障碍物探测线路数据生成方法,包括如下步骤:
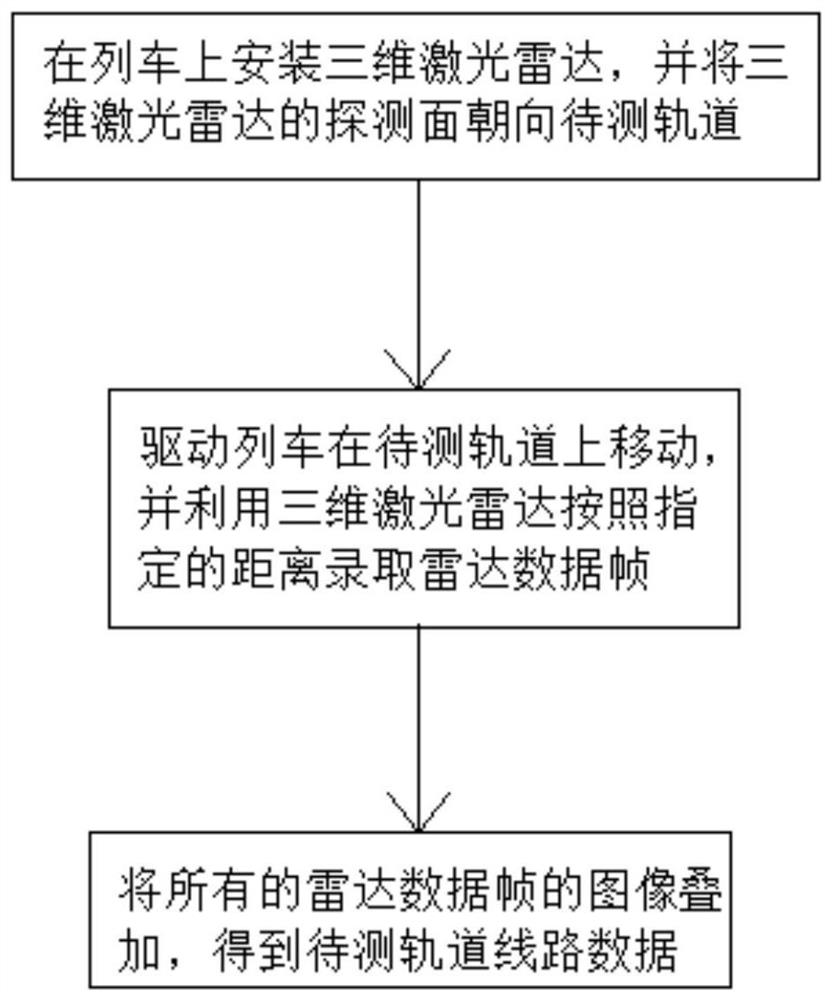
在列车上安装三维激光雷达,并将三维激光雷达的探测面朝向待测轨道;
驱动列车在待测轨道上移动,并利用三维激光雷达按照指定的距离录取雷达数据帧;
将所有的雷达数据帧的图像叠加,得到待测轨道线路数据。
作为本发明的一种优选技术方案,将所有的雷达数据帧的图像叠加,得到待测轨道线路数据的步骤还包括以下子步骤:预先将所有的雷达数据帧按照录取顺序进行编号;
预先用可视化软件对所有的雷达数据帧进行展示并建立与编号对应的第n坐标系;
在第n雷达数据帧中找出第n特殊标志点,并记录第n特殊标志点在第n坐标系的坐标,同时记录第n坐标系中第n轨道线的坐标;
在第n+1雷达数据帧找到第n特殊标志点,并记录第n特殊标志点在第n+1坐标系的坐标,同时记录第n+1坐标系中第n+1轨道线的坐标;
通过对第n特殊标志点的第n坐标系坐标和第n+1坐标系坐标的换算,得到第n坐标系和第n+1坐标系的换算关系;
根据第n坐标系和第n+1坐标系的换算关系,将第n+1坐标系中的第n+1轨道线的坐标换算成第n坐标系的坐标;
直到所有雷达数据帧中包含的轨道线的坐标都被换算成第一坐标系的坐标后,在第一坐标系中按照所有轨道线对应于第一坐标系的坐标进行描绘总的轨道线。
作为本发明的一种优选技术方案,所述可视化软件为CloudCompare。
作为本发明的一种优选技术方案,所述三维激光雷达每间隔50米就录取一次雷达数据帧。
一种列车障碍物探测线路数据生成系统,包括:
列车,用于安装三维激光雷达并带动所述三维激光雷达在待测轨道上移动;
三维激光雷达,将探测面朝向待测轨道,并按照指定的距离录取雷达数据帧;
线路数据计算模块,用于将所有的雷达数据帧的图像叠加,得到待测轨道线路数据。
作为本发明的一种优选技术方案,所述三维激光雷达安装在所述列车的前端中部。
一种利用数据帧图像叠加得到线路数据的算法,预先将所有的雷达数据帧按照录取顺序进行编号;还包括以下步骤:
预先用可视化软件对所有的雷达数据帧进行展示并建立与编号对应的第n坐标系;
在第n雷达数据帧中找出第n特殊标志点,并记录第n特殊标志点在第n坐标系的坐标,同时记录第n坐标系中第n轨道线的坐标;
在第n+1雷达数据帧找到第n特殊标志点,并记录第n特殊标志点在第n+1坐标系的坐标,同时记录第n+1坐标系中第n+1轨道线的坐标;
通过对第n特殊标志点的第n坐标系坐标和第n+1坐标系坐标的换算,得到第n坐标系和第n+1坐标系的换算关系;
根据第n坐标系和第n+1坐标系的换算关系,将第n+1坐标系中的第n+1轨道线的坐标换算成第n坐标系的坐标;
直到所有雷达数据帧中包含的轨道线的坐标都被换算成第一坐标系的坐标后,在第一坐标系中按照所有轨道线对应于第一坐标系的坐标进行描绘总的轨道线。
综上所述,本发明具有以下有益效果:本发明的方法和系统利用多个雷达数据中相同标志物的位置,把相邻两个雷达数据帧对应的坐标系关联起来,把相邻两个雷达数据轨道线的坐标,通过迭代的方法,换算到同一帧坐标系的坐标,从而完成整个轨道线路的数字坐标。这种方法简单,能够快速生成,更加实用,计算的精度也非常高,并且对场景的要求,对设备的要求都不高,一般工程技术人员就可以完成,更加合适于实际应用。
附图说明
图1是本发明方法的流程图;
图2是本发明的三维激光雷达安装坐标示意图;
图3是本发明的标志点M、N点在第一雷达数据帧中的位置示意图;
图4是本发明的标志点M、N点在第二雷达数据帧中的位置示意图;
图5是本发明的第一雷达数据帧与第二雷达数据帧坐标叠加示意图;
图6是本发明的第二雷达数据帧的点P在第一雷达数据帧中的坐标示意图。
具体实施方式
以下结合附图对本发明作进一步详细说明。
本发明提供一种列车障碍物探测线路数据生成方法,如图1所示,包括如下步骤:
在列车上安装三维激光雷达,并将三维激光雷达的探测面朝向待测轨道;
驱动列车在待测轨道上移动,并利用三维激光雷达按照指定的距离录取雷达数据帧,具体的,三维激光雷达每间隔50米就录取一次雷达数据帧;
将所有的雷达数据帧的图像叠加,得到待测轨道线路数据。
具体的,本发明还提供一种利用数据帧图像叠加得到线路数据的算法,也就是将所有的雷达数据帧的图像叠加,得到待测轨道线路数据的步骤,具体步骤为:预先将所有的雷达数据帧按照录取顺序进行编号;
预先用可视化软件对所有的雷达数据帧进行展示并建立与编号对应的第n坐标系,其中,可视化软件为CloudCompare_v2.11.alpha_bin_x64;
在第n雷达数据帧中找出第n特殊标志点,并记录第n特殊标志点在第n坐标系的坐标,同时记录第n坐标系中第n轨道线的坐标;
在第n+1雷达数据帧找到第n特殊标志点,并记录第n特殊标志点在第n+1坐标系的坐标,同时记录第n+1坐标系中第n+1轨道线的坐标;
通过对第n特殊标志点的第n坐标系坐标和第n+1坐标系坐标的换算,得到第n坐标系和第n+1坐标系的换算关系;
根据第n坐标系和第n+1坐标系的换算关系,将第n+1坐标系中的第n+1轨道线的坐标换算成第n坐标系的坐标;
直到所有雷达数据帧中包含的轨道线的坐标都被换算成第一坐标系的坐标后,在第一坐标系中按照所有轨道线对应于第一坐标系的坐标进行描绘总的轨道线。
对应于本发明的一种列车障碍物探测线路数据生成方法,本发明还提供了对应的系统,包括:
列车,用于安装三维激光雷达并带动三维激光雷达在待测轨道上移动,具体的,三维激光雷达安装在列车的前端中部,以便于对三维激光雷达进行标定,将标定后的三维激光雷达的坐标系和列车的车头的坐标系重合;
三维激光雷达,将探测面朝向待测轨道,并按照指定的距离录取雷达数据帧;
线路数据计算模块,用于将所有的雷达数据帧的图像叠加,得到待测轨道线路数据。
以下,是本发明的一种优选实施例:
列车车上安装高清的三维激光雷达,使激光雷达的探测面朝向前方轨道线路,并进行标定,标定后激光雷达的坐标系和列车车头的坐标系重合,如图2所示。
列车起始位置激光雷达的标定坐标系原点为大地相对坐标系的原点,列车向前运行,间隔一定的距离录取激光雷达数据帧,并把每帧的数据进行编号,如起始帧为1,往后依次编号为2、3、4……由于激光雷达扫描量程短,能把钢轨清楚扫出来的的距离50米,把每个编号的雷达数据帧图像叠加起来,就可以得到弯曲线路的全景。
具体的叠加过程为:
用软件CloudCompare_v2.11.alpha_bin_x64展示编号为1的雷达数据帧,在这一帧数据中,建立第一坐标系,找2个标志物的特殊点,也就是标志特殊点,分别命名为M、N,如图3所示,分别记下这些点的坐标M(Xm1、Ym1)、N(Xn1、Yn1),同时把轨道线用一系列的坐标点描绘出来。
再软件CloudCompare展示编号为2的雷达数据帧,在这一帧数据中,建立第二坐标系,找到在第一雷达数据帧中标注的2个标志物的特殊点M、N,分别记下这些点的坐标M(Xm2、Ym2)、N(Xn2、Yn2),如图4所示。再标注新的2个标志物的特殊点R、S,分别记下这些点的坐标R(Xr2、Yr2)、S(Xs2、Ys2),同时把第一雷达数据帧没有描绘到的轨道线延伸用坐标点描绘出来。
此时,M、N点是第一帧与第二帧数据间关联,R、S是第二帧与第三帧数据关联。
如图5所示,将三维空间投射到大地平面,虚拟地将第二雷达数据帧按M、N的点叠加到第一坐标系,由于激光雷达探测到的点的误差在2cm,故这些点重合度非常高。把第二雷达数据帧中的轨道线对应的点换算到第一坐标系中的坐标,这样就可以在第一坐标系中绘制出第一雷达数据帧到第二雷达数据帧这段轨道线路。
把第二雷达数据帧中的轨道点坐标转化到第一坐标的具体步骤为:
如图3-5所示,由M、N两点在第一坐标系中的坐标M(X
计算第二坐标系X
计算第二雷达数据帧中任意一点P(X
首先计算第二坐标系的坐标原点
在△NCK中,已知
在△NFW中,已知
在△KBW中,
这样可就算出第二坐标系的原点
在图6中:
由此求出P点相对于第一坐标系的坐标(X
将上述的这些计算过程编写为计算机程序,输入第二雷达数据帧中的轨道线对应的坐标点,并计算这些点在第一坐标系的坐标,在第一坐标系中把这些点按照顺序描绘起来,便可得到第一雷达数据帧和第二类大数据帧探测到的轨道曲线;
通过类推,求出之后的雷达数据帧中的轨道线对应点,就可以画出整个轨道线路。
本发明的优势在于:本发明的方法和系统利用多个雷达数据中相同标志物的位置,把相邻两个雷达数据帧对应的坐标系关联起来,把相邻两个雷达数据轨道线的坐标,通过迭代的方法,换算到同一帧坐标系的坐标,从而完成整个轨道线路的数字坐标。这种方法简单,能够快速生成,更加实用,计算的精度也非常高,并且对场景的要求,对设备的要求都不高,一般工程技术人员就可以完成,更加合适于实际应用。
以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 一种列车障碍物探测线路数据生成方法及系统
- 列车运行监控系统的自动驾驶线路数据生成方法与装置