锁紧件及无人机
文献发布时间:2023-06-19 10:52:42
技术领域
本公开涉及工程部件技术领域,具体地,涉及一种锁紧件及无人机。
背景技术
随着无人机技术的发展,无人机的应用领域越来越广泛。随着无人机在运输和农业领域的应用,对大载荷无人机的需求越来越强烈,大载荷意味着无人机的尺寸会增大。但为了便于搬运及转场,又需要无人机能够小巧便携。为了在保证大载荷的同时提高搬运便捷性,折叠式设计的无人机应运而生。
对于具有折叠式的无人机,可以采用销轴式的折叠方案。为了固定折叠机构的展开状态,可以利用锁筒锁紧该折叠机构和无人机的其他部件。相关技术中,锁筒是套在折叠机构上的,而该折叠机构两端往往会有其他部件,这无疑会导致锁筒拆装不方便。而若锁筒损坏,则由于损坏的锁筒不易拆卸,导致无人机不易维护。
发明内容
为了解决锁筒不易拆卸的问题,本公开提供了一种锁紧件和无人机。
本公开一方面提供了一种锁紧件,该锁紧件用于固定连接两个机构部件。该锁紧件包括:第一锁筒,设置有导向部;以及第二锁筒,设置有与导向部匹配的滑动部,其中,滑动部能够沿导向部滑动,以使得第二锁筒与第一锁筒相对合或相分离;在第二锁筒与第一锁筒相对合时形成套筒结构,锁紧件套设在其中一个机构部件上,并且与另外一个机构部件可拆卸连接,从而将两个机构部件固定连接起来。
在本公开的一些实施例中,上述导向部的导向方向平行于锁紧件的轴向。
在本公开的一些实施例中,导向部的导向方向与锁紧件的轴向相倾斜。
在本公开的一些实施例中,上述导向部的导向方向相对于锁紧件的轴向的倾斜角度小于等于30度。
在本公开的一些实施例中,上述套筒结构为两端开口的筒状结构。
在本公开的一些实施例中,套筒结构为圆锥形的筒状结构。
在本公开的一些实施例中,导向部为导向槽,滑动部为滑动凸起。
在本公开的一些实施例中,导向槽为燕尾形的凹槽,滑动凸起为燕尾形的凸起。
在本公开的一些实施例中,导向槽为T形的凹槽,滑动凸起为T形的凸起。
在本公开的一些实施例中,第一锁筒在导向部沿长度方向的一端设置有第一限位部;第二锁筒在滑动部沿长度方向的一端设置有与第一限位部匹配的第二限位部,其中,在滑动部沿导向部滑动时,滑动部能够在导向部沿长度方向的另一端与第一限位部之间滑动;在第二锁筒与第一锁筒完全相对合时,第二限位部与第一限位部相配合。
在本公开的一些实施例中,第一限位部为限位凸起,第二限位部为能够与限位凸起相卡合的限位凹槽。
在本公开的一些实施例中,第一限位部为限位凹槽,第二限位部为能够与限位凹槽相卡合的限位凸起。
在本公开的一些实施例中,第一锁筒在导向部沿长度方向的一端设置有与导向部位于同一平面的第一平台;第二锁筒在滑动部沿长度方向的一端设置有与滑动部位于同一平面的第二平台,其中,在滑动部沿导向部滑动时,滑动部能够自第一平台处滑动至导向部沿长度方向的另一端;在第二锁筒与第一锁筒相对合时,第一平台与第二平台相配合。
在本公开的一些实施例中,第一锁筒与第二锁筒均为在与轴线方向平行的两侧边设置有凸耳的半圆环状结构,其中,导向部设置于第一锁筒的凸耳上,且滑动部设置于第二锁筒的凸耳上;在第二锁筒与第一锁筒相对合时,第一锁筒的凸耳与第二锁筒的凸耳相贴合。
在本公开的一些实施例中,第一锁筒的凸耳还设置有凸出于其表面的凸点。
在本公开的一些实施例中,第二锁筒的凸耳还设置有凸出于其表面的凸点。
在本公开的一些实施例中,第一锁筒与第二锁筒为半圆环状结构,导向部设置于第一锁筒的端面上,第二锁筒设置于第二锁筒的端面上;在第一锁筒与第二锁筒相配合时,第一锁筒的端面与第二锁筒的端面相贴合。
在本公开的一些实施例中,第一锁筒的端面还设置有凸出于其端面的凸点。
在本公开的一些实施例中,第二锁筒的端面还设置有凸出于其端面的凸点。
在本公开的一些实施例中,第一锁筒和第二锁筒的内表面设有螺纹结构,以使锁紧件与至少一个机构部件相螺合。
本公开的另一方面提供了一种无人机,该无人机包括:第一机构部件;第二机构部件;以及锁紧件,锁紧件包括第一锁筒和第二锁筒,第一锁筒设置有导向部,第二锁筒设置有与导向部匹配的滑动部;其中,滑动部能够沿导向部滑动,以使得第二锁筒与第一锁筒相对合或相分离;在第二锁筒与第一锁筒相对合时形成套筒结构,锁紧件套设在第一机构部件上,并且与第二机构部件可拆卸连接,从而将第一机构部件和第二机构部件固定连接起来。
在本公开的一些实施例中,第二机构部件与第一机构部件可活动连接,且第二机构部件能够通过相对于第一机构部件的活动,使得第二机构部件处于展开状态或收回状态,其中,在第二机构部件处于展开状态时,锁紧件能够将第一机构部件和第二机构部件固定连接起来。
在本公开的一些实施例中,第一机构部件包括以下至少之一:机架本体、机臂和起落架。
在本公开的一些实施例中,第二机构部件包括以下至少之一:机架本体、机臂和起落架。
在本公开的一些实施例中,第二机构部件与第一机构部件可转动连接。
在本公开的一些实施例中,第二机构部件与第一机构部件可滑动连接。
在本公开的一些实施例中,在第二机构部件处于展开状态时,无人机能够处于可起飞状态。
在本公开的一些实施例中,在第二机构部件处于收回状态时,无人机能够处于打包运输状态。
在本公开的一些实施例中,无人机在第二机构部件处于展开状态时的体积,大于无人机在第二机构部件处于收回状态时的体积。
在本公开的一些实施例中,导向部的导向方向平行于锁紧件的轴向。
在本公开的一些实施例中,导向部的导向方向与锁紧件的轴向相倾斜。
在本公开的一些实施例中,导向部的导向方向相对于锁紧件的轴向的倾斜角度小于等于30度。
在本公开的一些实施例中,套筒结构为两端开口的筒状结构。
在本公开的一些实施例中,第一机构部件设置有第一配合部;第二机构部件设置有第二配合部,锁紧件能够与第一配合部和第二配合部相配合,且在锁紧件将第一配合部和第二配合部固定连接起来时,第一配合部和第二配合部位于套筒结构中。
在本公开的一些实施例中,第一锁筒和第二锁筒的内表面设有螺纹结构;第一配合部和第二配合部设有外螺纹结构,在锁紧件将第一配合部和第二配合部固定连接起来时,锁紧件与第一配合部和第二配合部相螺合。
在本公开的一些实施例中,套筒结构为圆锥形的筒状结构。
在本公开的一些实施例中,导向部为导向槽,滑动部为滑动凸起。
在本公开的一些实施例中,导向槽为燕尾形的凹槽,滑动凸起为燕尾形的凸起。
在本公开的一些实施例中,导向槽为T形的凹槽,滑动凸起为T形的凸起。
在本公开的一些实施例中,第一锁筒在导向部沿长度方向的一端设置有第一限位部;第二锁筒在滑动部沿长度方向的一端设置有与第一限位部匹配的第二限位部,其中,在滑动部沿导向部滑动时,滑动部能够在导向部沿长度方向的另一端与第一限位部之间滑动;在第二锁筒与第一锁筒完全相对合时,第二限位部与第一限位部相配合。
在本公开的一些实施例中,第一限位部为限位凸起,第二限位部为能够与限位凸起相卡合的限位凹槽。
在本公开的一些实施例中,第一限位部为限位凹槽,第二限位部为能够与限位凹槽相卡合的限位凸起。
在本公开的一些实施例中,第一锁筒在导向部沿长度方向的一端设置有与导向部位于同一平面的第一平台;第二锁筒在滑动部沿长度方向的一端设置有与滑动部位于同一平面的第二平台,其中,在滑动部沿导向部滑动时,滑动部能够自第一平台处滑动至导向部沿长度方向的另一端;在第二锁筒与第一锁筒相对合时,第一平台与第二平台相配合。
在本公开的一些实施例中,第一锁筒与第二锁筒均为在与轴线方向平行的两侧边设置有凸耳的半圆环状结构,其中,导向部设置于第一锁筒的凸耳上,且滑动部设置于第二锁筒的凸耳上;在第二锁筒与第一锁筒相对合时,第一锁筒的凸耳与第二锁筒的凸耳相贴合。
在本公开的一些实施例中,第一锁筒的凸耳还设置有凸出于其表面的凸点。
在本公开的一些实施例中,第二锁筒的凸耳还设置有凸出于其表面的凸点。
在本公开的一些实施例中,第一锁筒与第二锁筒为半圆环状结构,导向部设置于第一锁筒的端面上,第二锁筒设置于第二锁筒的端面上;在第一锁筒与第二锁筒相配合时,第一锁筒的端面与第二锁筒的端面相贴合。
在本公开的一些实施例中,第一锁筒的端面还设置有凸出于其端面的凸点。
在本公开的一些实施例中,第二锁筒的端面还设置有凸出于其端面的凸点。
从上述技术方案可以看出,本公开实施例至少具有以下有益效果:
本公开实施例的锁紧件由能够通过滑动而相对合或相分离的两个锁筒构成,因此在需要锁紧两个机构部件时,可以先将锁紧件套设在一个机构部件上,随后通过两个锁筒的相对合实现与另一机构部件的连接,通过两个锁筒的相分离实现与另一机构部件的拆卸。通过此方式,在锁紧件中的任一锁筒损坏时,可以便捷地将损坏的锁筒从机构部件上拆卸下来,提高由机构部件构成的无人机的可维护性。
附图说明
附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本公开,但并不构成对本公开的限制。在附图中:
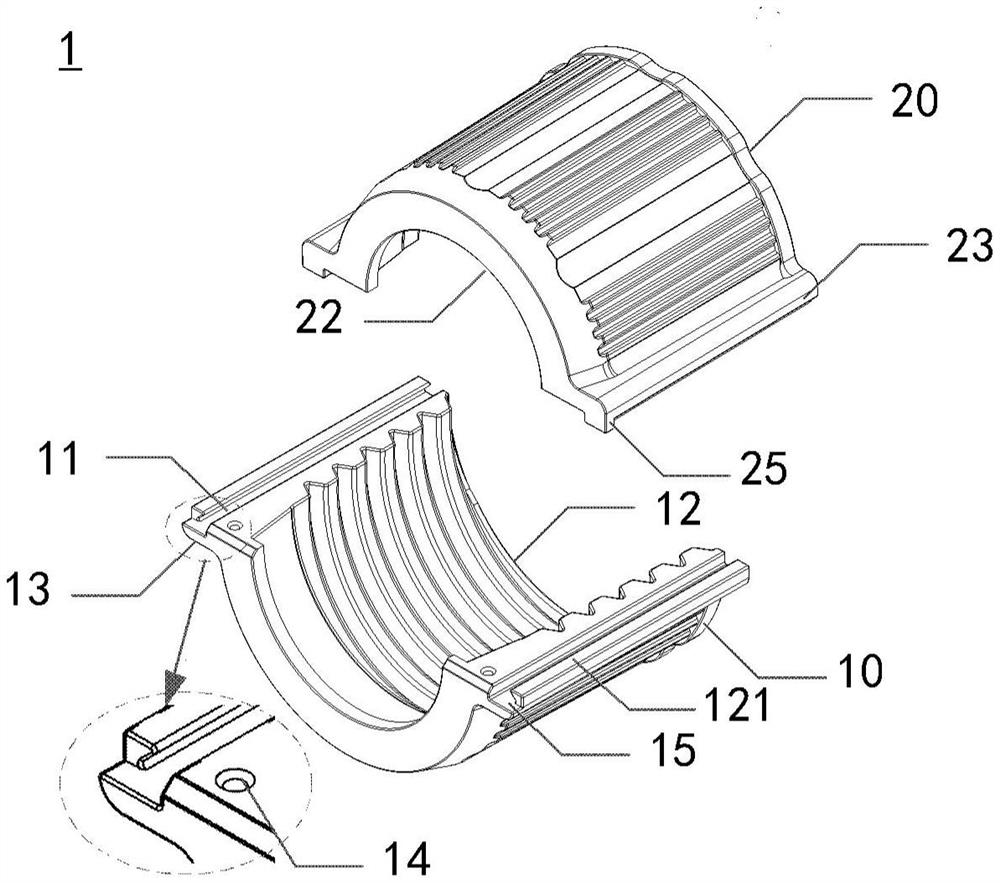
图1示意性示出了本公开实施例的锁紧件中两个锁筒相分离时的结构示意图;
图2示意性示出了本公开实施例的锁紧件中两个锁筒相对合时的结构示意图;
图3示意性示出了本公开实施例的第二锁筒的结构示意图;
图4示意性示出了图1中锁紧件的主视图;
图5示意性示出了图1中锁紧件的后视图;
图6示意性示出了图1中第一锁筒的俯视图;
图7示意性示出了图1中第一锁筒的垂直截面图;
图8示意性示出了根据本公开另一实施例的锁紧件中第一锁筒的结构示意图;
图9示意性示出了根据本公开另一实施例的锁紧件中第二锁筒的结构示意图;
图10示意性示出了本公开实施例的无人机的示意性结构图;
图11示意性示出了本公开实施例的无人机中机架的结构示意图;
图12示意性示出了图11中结构的主视图;
图13示意性示出了图11中结构的仰视图;
图14示意性示出了图11中结构俯视角度的截面图;
图15示意性示出了图11中A部分结构的截面图;以及
图16示意性示出了图15中B部分的放大图。
【附图标记说明】
1-锁紧件;
10-第一锁筒;20-第二锁筒;
11-导向部;12-第一开口;121-第一开口的端面;13-第一凸耳;14-凹点;15-第一平台;15’-第一限位部;
21-滑动部;22-第二开口;221-第二开口的端面;23-第二凸耳;24-凸点;25-第二平台;25’-第二限位部;
100-无人机;
110-机架本体;111-第一配合部;120-动力系统;130-起落架;140-机臂;141-第二配合部;150-撒播系统。
具体实施方式
为使本公开的目的、技术方案和优点更加清楚明白,以下结合具体实施例,并参照附图,对本公开进一步详细说明。
下面将结合本公开实施例中的附图,对本公开实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本公开一部分实施例,而不是全部的实施例。基于本公开中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本公开保护的范围。
本公开提供了一种锁紧件和无人机。其中无人机包括可以固定连接的第一机构部件,第二机构部件和所述锁紧件。该第一机构部件和第二机构部件例如可以在锁紧件处于锁紧状态时固定连接,在锁紧件处于非锁紧状态时相对移动或转动。锁紧件包括两个锁筒,本公开实施例通过使得构成锁紧件的两个锁筒分别设置导向部和滑动部,可以使得由该两个锁筒能够相对合或相分离。从而经由该两个锁筒的相对合和相分离,可以使得锁紧件固定套设于任一机构部件上或自任一机构部件上拆卸下来,并因此提高包括该锁紧件的无人机的可维护性。
为了便于描述,以下先结合图1~图9对本公开实施例的锁紧件进行详细描述。
图1示意性示出了本公开实施例的锁紧件中两个锁筒相分离时的结构示意图,图2示意性示出了本公开实施例的锁紧件中两个锁筒相对合时的结构示意图。图3示意性示出了本公开实施例的第二锁筒的结构示意图。
如图1~2所示,本公开实施例的锁紧件1包括第一锁筒10和第二锁筒20。其中,如图1所示,第一锁筒10例如可以设置有导向部11。如图3所示,第二锁筒20设置与导向部11匹配的滑动部21。
在一实施例中,滑动部21例如可以沿匹配的导向部11滑动,以与导向部11完全贴合、部分贴合或完全分离。其中,在滑动部21与导向部11完全分离时,可以使得第一锁筒10与第二锁筒20之间处于如图1所示的相分离的状态。在滑动部21与导向部11部分贴合或完全贴合时,可以使得第一锁筒10与第二锁筒20之间相贴合。例如,在滑动部21与导向部11完全贴合时,第一锁筒10与第二锁筒20之间由于完全贴合可以处于如图2所示的相对合的状态。滑动部21与导向部11完全贴合时,锁紧件1处于锁紧状态。滑动部21与导向部11完全分离和部分贴合时,锁紧件1处于非锁紧状态。
在一实施例中,第一锁筒10与第二锁筒20在垂直于长度方向的横截面例如可以为拱形结构、马蹄形结构、弓形结构、凹字形结构或在底边具有开口的梯形结构等,以使得该第一锁筒10与第二锁筒20均具有至少一个开口。
示例性地,第一锁筒10例如可以具有第一开口12,第二锁筒20例如可以具有第二开口22。该第一开口12与第二开口22的尺寸相匹配。示例性地,该第一开口12与第二开口22在垂直于轴向方向上的尺寸例如可以相等。导向部11设置于第一开口12的端面121,滑动部21设置于第二开口22的端面221。因此,在第一锁筒10与第二锁筒20经由滑动部21沿导向部11的滑动而处于如图2所示的相对合的状态时,第一开口12与第二开口22相对合,且第一锁筒10与第二锁筒20经由该第一开口12与第二开口22的对合可以形成中空的套筒结构。
在一实施例中,设置于第一锁筒10的导向部11的导向方向例如可以平行于锁紧件1的轴向(图2中虚线的延伸方向),具体即为平行于套筒结构的轴向。如此,第一开口12与第二开口22构成的套筒结构在垂直于锁紧件1的轴向上的尺寸在轴向方向上是固定不变的。示例性地,套筒结构在沿轴向方向上的截面形状例如可以为矩形。
在一实施例中,设置于第一锁筒10的导向部11的导向方向例如可以与锁紧件1的轴向(图2中虚线的延伸方向)相倾斜。具体即为相对于套筒结构的轴向倾斜。示例性地,套筒结构在垂直于锁紧件1的轴向上的尺寸在轴向方向上是渐变的,例如套筒结构在垂直于锁紧件1的轴向上的尺寸可以沿着轴向方向逐渐变小。其中,第一锁筒10的导向部11的导向方向相对于锁紧件1的轴向的倾斜角度可以根据实际需求进行设定。其中,在一具体实施例中,该倾斜角度例如可以小于等于30度。可以理解的是,上述倾斜角度的取值仅作为示例以利于理解本公开,本公开对此不作限定。示例性地,套筒结构在沿轴向方向上的截面形状例如可以为梯形。
根据本公开的实施例,在设置于第一锁筒10的导向部11的导向方向与锁紧件1的轴向方向不平行时,套筒结构在垂直于锁紧件1的轴向上的尺寸在轴向方向上的渐变例如还可以为:先逐渐变大、在逐渐变小;或者先逐渐变小,再逐渐变大。
在一实施例中,第一开口12与第二开口22在垂直于锁紧件1的轴向方向上的形状例如可以为拱形结构、马蹄形结构、“弓”形结构、矩形结构和梯形结构中的任意一种。
在一实施例中,为了实现两个机构部件的可拆卸连接,例如可以将该锁紧件1套设于两个机构部件上的一个机构部件上,在需要连接两个机构部件时,可以先经由滑动部21沿着导向部11的滑动,使得第一锁筒10与第二锁筒20相分离。然后使得第二锁筒20套设在另一机构部件外侧。最后使第二锁筒20经由滑动部21沿着导向部11的滑动与第一锁筒10相对合。通过此方式,可以使得两个机构部件均设置在套筒结构中,从而实现两个机构部件的固定连接。
图4示意性示出了图2中锁紧件的主视图;图5示意性示出了图2中锁紧件的后视图。
如图4~图5所示,由第一开口12和第二开口22相对合形成的套筒结构可以为两端开口的筒状结构。如此,第一开口12可以为延伸长度与第一锁筒10的长度相等的开口,第二开口22可以为延伸长度与第二锁筒20的长度相等的开口。在需要通过锁紧件使得两个机构部件连接时,可以方便地将锁紧件1通过套筒结构一端的开口套设于其中一个机构部件上,并方便地使得另一个机构部件通过套筒结构另一端的开口穿入套筒结构内,从而实现两个机构部件的固定连接。
在一实施例中,第一开口12与第二开口22在垂直于锁紧件1的轴向方向上的形状例如可以为半椭圆形。如此,在套筒结构沿轴向方向的尺寸固定不变时,该套筒结构可以为两端开口的椭圆筒状结构;在套筒结构沿轴向方向的尺寸渐变时,该套筒结构可以为两端开口、但两端的椭圆面积不相等的筒状结构。或者,该第一开口12与第二开口22在垂直于锁紧件1的轴向方向上的形状例如可以为半圆形,如此,在套筒结构沿轴向方向的尺寸固定不变时,该套筒结构可以为两端开口的圆筒状结构;在套筒结构沿轴向方向的尺寸渐变时,该套筒结构可以为两端开口、但两端的圆面积不相等的筒状结构。
在一实施例中,套筒结构例如还可以为一端开口的筒状结构,第一开口12与第二开口22在垂直于锁紧件1的轴向方向上的形状同样可以为半椭圆形或半圆形。其中,在形状为半圆形时,该套筒结构例如可以为圆锥形的筒状结构。
在一实施例中,如图4~5所示,第一锁筒10与第二锁筒20例如可以均为在与轴线方向平行的两侧边设置有凸耳的半圆环状结构。例如,第一锁筒10可以为具有第一凸耳13的半圆环状结构,第二锁筒20可以为具有第二凸耳23的半圆环状结构。相应地,第一锁筒10的导向部11可以设置于该第一锁筒10所具有的第一凸耳13上,第二锁筒20的滑动部21可以设置于第二锁筒20所具有的第二凸耳23上。如此,在第一锁筒10与第二锁筒20相对合时,该第一凸耳13与第二凸耳23相贴合,从而使得两个半圆环状结构相对合而形成套筒结构。此时,第一凸耳13的表面包括第一开口12的端面121。第二凸耳23的表面包括第二开口22的端面221。
在一实施例中,第一锁筒10与第二锁筒20还可以为未设置凸耳的半圆环状结构。此时,第一锁筒10的导向部11可以设置于第一锁筒10的半圆环状结构的端面上。第二锁筒20的滑动部21可以设置于第二锁筒20的半圆环状结构的端面上。在第一锁筒10与第二锁筒20相配合时,第一锁筒10的端面和第二锁筒20的端面相贴合,从而使得两个半圆环状结构相对合形成套筒结构。此时,第一锁筒10的端面即为第一开口12的端面121,第二锁筒20的端面即为第二开口22的端面221。
根据本公开的实施例,为了使得第一锁筒10与第二锁筒20能够通过滑动部21沿着导向部11的滑动而形成锁筒结构。如图1~5所示,第一锁筒10设置的导向部11例如可以为导向槽,第二锁筒20设置的滑动部21例如可以为滑动凸起,且该导向槽的深度与该滑动凸起的高度相匹配。如此,在滑动部21沿着导向部11的滑动而使得第一锁筒10与第二锁筒20相对合并固定连接两个机构部件时,可以提高两个机构部件连接的稳固性。
示例性地,为了进一步提高锁紧件1固定连接两个机构部件时,两个机构部件连接的稳固性。所述的导向槽例如可以为燕尾型的凹槽,相应地,所述的滑动凸起可以为燕尾型的凸起。或者所述的导向槽例如可以为T形的凹槽,所述的滑动凸起为T形的凸起。如此,可以使得滑动凸起仅能沿着导向槽的延伸方向滑动,而无法通过在导向槽的深度方向上的移动而与导向槽相脱离。
图6示意性示出了图1中第一锁筒的俯视图,图7示意性示出了图1中第一锁筒的垂直截面图。
根据本公开的实施例,为了便于实现两个机构部件的固定连接,第一锁筒10与第二锁筒20的尺寸相匹配的开口内表面例如可以设置有螺纹结构。如图6~图7所示,第一锁筒10的内表面具有螺纹结构。第二锁筒20的内表面的螺纹结构与图6~图7所示的螺纹结构类似。相应地,两个机构部件的外表面可以具有螺纹结构,从而使得两个锁筒可以通过与两个机构部件中任一机构部件的螺纹结构的螺合,实现与该任一机构部件的稳固连接。
示例性地,该第一锁筒10与第二锁筒20通过内表面的螺纹结构的设置,可以使得第一锁筒10与第二锁筒20由于内表面的螺纹结构与机构部件的螺纹结构的相互作用而无法沿着轴向滑动。再者,第一锁筒与第二锁筒通过燕尾形的滑动凸起(T形的滑动凸起)和燕尾形的导向槽(T形的导向槽)的设置,可以在第一锁筒10与第二锁筒20相对合并使得两个机构部件固定连接时,因滑动凸起与导向槽的形状限定而使得第一锁筒10与第二锁筒20无法在受到垂直于轴向方向的作用力而相互脱离。从而使得第一锁筒10与第二锁筒20无法拆开,保证了锁紧件1锁紧两个机构部件的稳固性。
示例性地,在需要拆开两个锁筒的连接时,可以通过锁紧件1相对于两个机构部件的旋动而使得锁紧件1与两个机构部件相脱离。此时,由于锁紧件1没有了螺纹结构的相互作用,因此,第二锁筒20可以沿着第一锁筒10的轴向移动,从而将滑动凸起从导向槽中脱出,拆开两个锁筒。
根据本公开的实施例,为了避免在第一锁筒10与第二锁筒20相对合而形成套筒结构并固定两个机构部件后,该第一锁筒10与第二锁筒20因受到震动作用而沿轴向相对运动,从而无法稳固连接两个机构部件的情况。该实施例的第一锁筒10的第一开口12的端面121上除了设置导向部11外,还可以设置有凸点;第二锁筒20的第二开口22的端面221上除了设置滑动部21外,还可以设置有凹点。或者,该实施例的第一锁筒10的第一开口12的端面121上除了设置导向部11外,还可以设置有凹点;第二锁筒20的第二开口22的端面221上除了设置滑动部21外,还可以设置有凸点。其中,凸点和凹点的尺寸相匹配,且在第一锁筒10与第二锁筒20相对合时,该凸点可以恰好卡入凹点中。从而在锁紧件1受到震动作用时,通过凹点对凸点的限制作用,可以进一步防止锁紧件1中的两个锁筒沿轴向方向的相对运动。
示例性地,如图1和图3所示,在第一锁筒10与第二锁筒20均为具有凸耳的半圆环状结构时,第一锁筒10的第一凸耳13上设置有凹设在第一凸耳表面的凹点14,第二锁筒20的第二凸耳23上设置有凸出于第二凸耳表面的凸点24。或者,第一锁筒10的第一凸耳13上设置有凸出于第一凸耳表面的凸点,第二锁筒20的第二凸耳23上设置有凹设在第二凸耳表面的凹点。
示例性地,在第一锁筒10与第二锁筒均为没有凸耳的半圆环状结构时,第一锁筒10的端面上设置有凹设在端面的凹点,第二锁筒20的端面上设置有凸出于端面的凸点。或者,第一锁筒10的端面上设置有凸出于端面的凸点,第二锁筒20的端面上设置有凹设在端面的凹点。
根据本公开的实施例,为了保证第一锁筒10与第二锁筒20相对合时的精准度,避免因第二锁筒20的滑动部21沿着导向部11滑动过多或过少而无法稳固连接两个机构部件。该实施例的第一锁筒10和第二锁筒20例如还可以设置有限位结构,在该限位结构的作用下来限制第二锁筒20的滑动部21沿着导向部11滑动的范围。
示例性地,如图1所示,第一锁筒在导向部11沿长度方向的一端可以设置有与导向部11位于同一平面的第一平台15。相应地,如图3所示,第二锁筒20在滑动部21沿长度方向的一端例如可以设置有与滑动部21位于同一平面的第二平台25。通过此设置,在滑动部21沿着导向部11滑动时,滑动部21能够自第一平台15处滑动至导向部11沿长度方向的另一端,且由于第二平台25与导向部边沿的相互作用,限制滑动部21无法继续滑动。在第二锁筒20与第一锁筒完全相对合时,第二平台25与第一平台15相配合。此时,第一平台15与第二平台25为限位结构。
图8示意性示出了根据本公开另一实施例的锁紧件中第一锁筒的结构示意图,图9示意性示出了根据本公开另一实施例的锁紧件中第二锁筒的结构示意图。
本公开在另一实施例中提出一种锁紧件,该锁紧件与图1~图7中的锁紧件类似,区别仅在于,如图8所示,该实施例的第一锁筒10在导向部11沿长度方向的一端例如还可以设置有第一限位部15’。相应地,如图9所示,第二锁筒20在滑动部21沿长度方向的一端例如可以设置有与第一限位部15’匹配的第二限位部25’。通过此设置,在滑动部21沿着导向部11滑动时,滑动部21能够在导向部11沿长度方向的另一端与该第一锁筒10设置的第一限位部15’之间滑动,且由于该第一限位部15’的限制,无法继续滑动直至越过第一限位部15’或导向部11的另一端。在第二锁筒20与第一锁筒10完全相对合时,第二限位部25’与第一限位部15’相配合。
示例性地,在一实施例中,如图8和图9所示,第一限位部15’例如可以为相对于导向部的限位凸起,第二限位部25’例如可以相对于滑动部的限位凹槽。则在第一锁筒10的滑动部21沿着导向部11从导向部11的另一端开始向设置第一限位部15’的一端滑动的过程中,在到达第一限位部15’所在位置后,由于该第一限位部15’的限制作用而无法继续滑动。此时,第一锁筒10与第二锁筒20相对合,限位凸起与限位凹槽相卡合。
示例性地,在另一实施例中,第一限位部例如可以为相对于导向部的限位凹槽,第二限位部例如可以相对于滑动部的限位凸起。则在第一锁筒10的滑动部21沿着导向部11从限位凹槽所在端开始向导向部11沿长度方向的另一端滑动的过程中,在滑动部21滑动至导向部11的另一端时,由于滑动部21上的限位凸起的限制作用使得滑动部21而无法继续滑动。此时,第一锁筒10与第二锁筒20相对合,限位凸起与限位凹槽相卡合。
综上可知,本公开提供的锁紧件,通过第一限位部和第二限位部的设置,可以限制滑动部能够在导向部的一端与第一限位部之间滑动。因此在需要锁紧两个机构部件使得两个机构部件固定连接时,可以通过第二锁筒20的滑动部在第一方向沿着第一锁筒10的导向部的滑动,使得第一锁筒10与第二锁筒20相对合,使得该两个机构部件的至少部分结构卡设于两个锁筒相对合形成的套筒结构中。在需要释放两个机构部件使两个机构部件相拆分时,可以通过第二锁筒20的滑动部在与第一方向相反的第二方向上的滑动,使得第一锁筒10与第二锁筒20相脱离。从而释放对两个机构部件的锁紧,使得两个机构部件可以相拆分。因此,本公开通过该锁紧件包括的两个锁筒的设置,可以实现锁紧件的快拆和快装,并因此提高该锁紧件维护的便捷性。
以下将基于上述的锁紧件,结合图10~图16对本公开提供的无人机进行详细描述。
如图10所示,本公开实施例的无人机100例如可以包括机架本体110、多个动力系统120、起落架130和多个机臂140。
示例性地,机架本体110可以围成容纳腔,该容纳腔中例如可以设置有GPS接收器、飞控系统和电子调速器等电子元件。多个动力系统120与多个机臂140一一对应。其中,每个动力系统可以包括电机组件和与电机组件连接的桨叶,且每个动力系统可以设置于与其对应的机臂140上,由该对应的机臂140来支撑该动力系统120。起落架130位于机架本体110下方,且与机架本体110连接。在无人机降落时,可以用于无人机着陆。
在一实施例中,如图10所示,该无人机100例如还可以包括撒播系统150,该撒播系统150例如可以包括盛物容器,用于盛放需要撒播的液体或固体。在无人机应用于农业领域时,该盛物容器例如可以盛放需要撒播的农药、农肥或种子等。该撒播系统150设置于机架本体110下方,以便于在无人机飞行过程中,将盛物容器盛放的液体或固定撒播于无人机下方。
根据本公开的实施例,该无人机100例如还可以包括有前述图1~图9中任一实施例描述的锁紧件1。相应地,前文描述的第一机构部件例如可以为无人机100包括的机架本体110、机臂140和起落架130中的任意一个。前文描述的第二机构部件例如可以为无人机100包括的机架本体110、机臂140和起落架130中的任意一个。
根据本公开的实施例,该无人机100中的第一机构部件例如可以与第二机构部件活动连接。且通过第二机构部件相对于第一机构部件的活动,可以使得该第二机构部件处于展开状态或收回状态。在第二机构部件处于展开状态时,锁紧件能够将第一机构部件和第二机构部件固定连接起来。
其中,为了使得第二机构部件能够固定于展开状态,锁紧件1可以设置于第一机构部件和第二机构部件中的至少一个上。在第二机构部件处于展开状态时,锁紧件包括的两个锁筒能够相配合或相分离。其中,在两个锁筒相配合时能够锁紧第一机构部件和第二机构部件,以使得第二机构部件保持为展开状态。
在一实施例中,在第二机构部件处于展开状态时,该无人机100能够处于可起飞状态。而在第二机构部件处于收回状态或者不完全的展开状态时,该无人机100无法处于可起飞状态。因此,通过使用锁紧件1将第二机构部件和第一机构部件锁紧,可以使得第二机构部件维持在展开状态,使得无人机维持于可起飞状态。在第二机构部件处于收回状态时,该无人机能够处于打包运输状态,以便于用户将需要无人机运输或播撇的物体打包至无人机。
在一实施例中,无人机100在第二机构部件处于展开状态时的体积,大于无人机在第二机构部件处于收回状态时的体积。因此,在需要运输无人机100时,可以将第二机构部件收回,以此提高无人机的运输便捷性。
如图11~图16所示,在一实施例中,第一机构部件可以为机架本体110,第二机构部件可以为机臂140。多个机臂140与机架本体110之间可转动连接,以使得多个机臂140中的每个机臂可以相对于机架本体110转动,使得多个机臂140中的每个机臂可以处于收回状态或展开状态。
示例性地,如图11~图16所示,该机架本体110例如可以包括有多个第一配合部111。多个第一配合部111与多个机臂140一一对应的可转动连接。多个机臂中的任一机臂可以通过相对于对应的第一配合部111的转动而处于展开状态或收回状态。相应地,该无人机100可以包括多个锁紧件1,多个锁紧件1与多个机臂140一一对应。
根据本公开的实施例,为了便于实现多个机臂140与对应的第一配合部111的可转动连接,机架本体110例如还可以包括多个销轴,该多个销轴与多个机臂140一一对应,每个机臂140通过与对应的销轴的铰接来实现其与对应的第一配合部111的可转动连接。相应地,机架本体110上靠近多个第一配合部111的位置可以设置有多个固定位,或者,该多个第一配合部111中每个第一配合部111可以设置有固定位,每个固定位用于穿入一个轴销,从而实现每个机臂140与相对于对应的第一配合部111之间的可转动连接。
根据本公开的实施例,在锁紧件1中的第一锁筒10中第一开口12在垂直于轴线方向的宽度与第二锁筒20中第二开口22在垂直于轴线方向的宽度可以大于对应的机臂140的外径尺寸,从而使得第一锁筒10与第二锁筒20可以套设于对应的机臂140上,并可以在其所套设的机臂140上进行自由移动。
在任一机臂140处于如图11~图12所示的展开状态时,为了使得该任一机臂140固定于展开状态,与该任一机臂140对应的锁紧件1中的第一锁筒10和第二锁筒20可以分别经由第一开口12和第二开口22套设于该任一机臂140上。通过推动第一锁筒10,例如可以使该第一锁筒10移动至与该任一机臂140对应的第一配合部111处。然后使得第二锁筒20的滑动部21沿着第一锁筒10的导向部11沿靠近第一配合部111的方向滑动,使得第二锁筒20与第一锁筒10相配合。在第一锁筒10与第二锁筒20相配合时,锁紧件1例如可以处于如图11中的A部分所示的状态,且任一机臂140的部分结构及机架本体110的部分结构位于第一锁筒10与第二锁筒20相对合所形成的套筒结构中。通过此方式,可以限定任一机臂140与相对应的第一配合部111之间的相对位置,从而使得任一机臂140固定于展开状态。
在需要将任一机臂140从展开状态切换为收回状态时,可以使得第二锁筒20的滑动部21沿着导向部11向远离第一配合部111的方向滑动,从而使得两个锁筒相脱离,使得锁紧件1不再限定任一机臂140与相对应的第一配合部111之间的相对位置。为了避免两个锁筒因套设在机臂140上而容易丢失,此时,还可以在两个锁筒相脱离后,通过拖动两个锁筒,使得两个锁筒从任一机臂140上卸下。
示例性地,为了便于通过锁紧件1固定任一机臂140处于展开状态,多个机臂中的每个机臂例如可以在靠近与其对应的第一配合部111的一端设置有如图11所示的第二配合部141。在第一锁筒10与第二锁筒20需要固定任一机臂140处于展开状态时,该锁紧件例如可以与对应的第一配合部111及该任一机臂140的第二配合部141相配合。且在锁紧件1将任一机臂140与机架本体110固定连接起来时,与该任一机臂140对应的第一配合部及该任一机臂140包括的第二配合部141均位于套筒结构中。
根据本公开的实施例,第一锁筒10与第二锁筒20具有的开口的内表面设置有螺纹结构。相应地,多个机臂140中的每个机臂140可以在其第二配合部141的外表面设置螺纹结构,且每个第一配合部111的外表面也设置螺纹结构。
根据本公开的实施例,在机臂140处于展开状态时,第一配合部111的螺纹结构与第二配合部141的螺纹结构例如可以拼接形成与套筒结构匹配的柱状结构或锥状结构,以使得锁紧件1能够与该第一配合部111与第二配合部141相配合。
示例性地,如图13所示,在第一锁筒10与第二锁筒20均为半圆环状结构时,该第一配合部111的螺纹结构与第二配合部141的螺纹结构例如均可以为半圆弧形。相应地,在机臂140处于展开状态时,该第一配合部111的螺纹结构与第二配合部141的螺纹结构例如可以拼接形成圆柱状结构。如此,在需要通过锁紧件1固定连接任一机臂140与机架本体110时,可以先将与该任一机臂140对应的锁紧件1中的第一锁筒10和第二锁筒20可以分别经由第一开口12和第二开口22套设于该任一机臂140上。然后使得第二锁筒20的滑动部21沿着第一锁筒10的导向部11沿靠近第一配合部111的方向滑动,实现第二锁筒20与第一锁筒10的相配合。最后,将第一锁筒10与第二锁筒20相配合后的锁紧件1移动至第一配合部111与第二配合部141所在位置,并转动该锁紧件1,使得锁紧件1的套筒结构表面的螺纹结构与第一配合部111和第二配合部141的螺纹结构相螺合,从而锁紧该任一机臂140与机架本体110。此时,该无人机100中任一机臂140与机架本体110的连接关系可以如图11中的A部分及图15~图16所示。
可以理解的是,上述第一机构部件为机架本体,第二机构部件为机臂的实施例仅作为示例以利于理解本公开,本公开对此不作限定。
在一实施例中,第一机构部件和第二机构部件例如可以为同一机臂140的不同部分。例如,机臂140可以为中空结构,且包括固定端和伸缩端。其中,机臂140的固定端与机架本体110固定连接,且机臂140自固定端至伸缩端的尺寸逐渐减小。例如,该机臂140可以包括多个能够依次嵌套的管状结构,固定端为该多个管状结构中尺寸最大的管状结构的一端,伸缩端为多个管状结构中尺寸最小的管状结构的一端。此时,第一机构部件和第二机构部件指该多个管状结构在展开时位置相邻的两个管状结构。在机臂140的多个管状结构依次嵌套时,该第二机构部件处于收回状态。在机臂140的依次嵌套的多个管状结构被抽出而不存在嵌套部分时,该第二机构部件处于展开状态。此时,第一机构部件与第二机构部件例如可以可转动连接。
在一实施例中,第一机构部件可以为机架本体110,第二机构部件可以为起落架130。其中,该起落架130与机架本体110之间例如可以可转动连接,起落架130与机架本体110之间的连接关系类似于前述实施例中机臂140与机架本体110可转动连接的关系。在一实施例中,起落架130与机架本体110之间例如也可以可滑动连接。
在一实施例中,第一机构部件与第二机构部件可以均为机架本体110,机架本体110可以包括至少两个壳体,该至少两个壳体相互拼接形成机架本体110。在收纳时,可将该至少两个壳体相嵌套或相重叠放置,以减小收纳无人机时所需的空间。相应地,第一机构部件和第二机构部件为拼接形成机架本体110时在位置上相接触的两个壳体。在该至少两个壳体拼接形成机架本体110时,第二机构部件处于展开状态。在该至少两个壳体相重叠放置时,第二机构部件处于收回状态。此时,第一机构部件与第二机构部件可以可滑动连接,通过第二机构部件相对于第一机构部件的滑动,使得嵌套或重叠放置的两个机构部件相脱离,从而拼接形成机架本体110。
综上可知,本公开实施例的无人机,通过使用由能够通过滑动而相对合或相分离的两个锁筒构成的锁紧件,可以在需要锁紧两个机构部件时,先将锁紧件套设在一个机构部件上,随后通过两个锁筒的相对合实现与另一机构部件的连接;通过两个锁筒的相分离实现与另一机构部件的拆卸。通过此方式,在锁紧件中的任一锁筒损坏时,可以便捷地将损坏的锁筒从机构部件上拆卸下来,提高由机构部件构成的无人机的可维护性。
以上为本公开的最优实施例,需要说明的,该最优的实施例仅用于理解本公开,并不用于限制本公开的保护范围。并且,最优实施例中的特征,在无特别注明的情况下,均同时适用于方法实施例和装置实施例,在相同或不同实施例中出现的技术特征在不相互冲突的情况下可以组合使用。
需要说明的是,上述对各元件的定义并不仅限于实施方式中提到的各种具体结构或形状,本领域的普通技术人员可对其进行简单地熟知地替换,以上所述的具体实施例,对本公开的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本公开的具体实施例而已,并不用于限制本公开,凡在本公开的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本公开的保护范围之内。
- 用于锁紧待锁紧件和固定件的快速锁紧机构及其锁紧方法
- 一种可旋转折叠锁紧五金件及无人机