一种基于SVM算法的行人横穿马路决策建模方法
文献发布时间:2023-06-19 10:54:12
技术领域
本发明涉及交通安全技术领域,特别涉及一种基于SVM算法的行人横穿马路决策建模方法。
背景技术
在实际生活中,行人违规横穿马路的情况时有发生,其中包括在交叉路口、有人行道且有红绿灯情况下的行人横穿马路情况。行人的违规穿行对行驶中的车辆和行人本身造成了不容忽视的威胁。随着辅助驾驶技术的发展,越来越多的辅助驾驶技术正在逐渐减轻驾驶员的驾驶负担。快速发展的图像识别技术,尤其是人脸识别技术和计算机计算能力的发展,通过人脸识别技术对行人的决策意图进行预测成为了可能。为了解决准确辨别行人横穿马路的决策意图,以增加车辆辅助驾驶系统的功能,保证车辆行驶通过路口时横穿马路的行人的安全,就要求建立一个准确的行人横穿马路决策模型。现有技术中,并没有公开这样一种准确的行人横穿马路决策模型及其建模方法。
公开号为CN109871738A、名称为“一种适应人自混行环境的行人运动意图辨识方法”的中国专利,提出了一种基于相场理论与模糊逻辑方法构建的行人运动意图辨识模型的方法。该方法主要使用场论和模糊逻辑,并不涉及本发明的基于SVM算法进行相关模型训练的方法。
申请号为CN201910066829.4、名称为“一种非机动车或行人的过街意图检测系统及方法”的中国专利,提出了根据非机动车的横向位置数据、骑车人回头瞭望次数或路段行人的转头瞭望次数、路段行人在人行道的横向位置及移动速度判断行人或者机动车的过街意图,但并未涉及根据多个实际行人横穿马路时采集的数据进行建模的方法,其预测行人过街意图的准确性并不可靠。
因此,需要开发一种计算量小,开发成本低廉,准确度高的行人横穿马路决策模型的建模方法。
发明内容
为了解决现有技术的问题,本发明的主要目的在于提供一种行人横穿马路决策建模方法,以采集的实际行人横穿马路的面部特征数据,建立基于SVM 算法的行人横穿马路决策模型。
为了达到上述目的,本发明提供一种基于SVM算法的行人横穿马路决策建模方法,包括以下步骤:
步骤一、采集实际行人数据:在包含人行道和交通信号灯的交叉路口处,使用人脸识别设备采集多个实际行人横穿马路过程的面部特征数据;
步骤二、处理试验数据:具体包括子步骤:
1)去除位于人行道外轮廓线向外偏移一定距离范围L以外的行人的面部特征数据;
2)根据行人穿行时是否违反交通信号灯,计算并提取违规穿越人行道的行人在开始穿行一段时间内的查看方向切换次数和保持侧视状态的时长,得到原始数据集;其中,行人的查看方向切换次数和保持侧视状态的时长是根据行人在开始穿行一段时间内的面部特征数据确定;
3)根据行人是否违规通过人行道,将所述原始数据集划分为穿行数据集和等待数据集,并在穿行数据集的数据中加入穿行决策类型标签,在等待数据集的数据中加入等待决策类型标签;
步骤三、训练模型:利用所述穿行数据集、等待数据集和SVM算法,训练得到基于SVM算法的行人横穿马路决策模型;其中,训练模型时,以行人的查看方向切换次数和保持侧视状态的时长作为自变量,以行人决策类型标签为因变量;
步骤四、测试模型。
进一步地,所述面部特征数据包括行人面部横摆角、面部俯仰角;当面部俯仰角大于一定阈值γ时,认为行人正在进行查看;
当脸部向左横摆角度大于一定阈值θ、面部俯仰角度大于一定阈值γ时,认为行人在向左查看;
当脸部向右横摆角度大于一定阈值θ、面部俯仰角度大于一定阈值γ时,认为行人在向右查看;
当脸部向左横摆角度小于一定阈值θ、脸部向右横摆角度小于一定阈值θ、面部俯仰角度大于一定阈值γ时,认为行人在向前查看;
查看方向切换次数指的是行人查看方向由一个方向变为另一个方向的切换次数;
保持侧视状态的时长表示行人保持向左查看或保持向右查看状态的时长。
在一优选实施例中,所述阈值γ设置为60°,所述阈值θ设置为30°。
在一优选实施例中,所述步骤二的子步骤1)中,人行道外轮廓线向外偏移一定距离范围L设置为1m。
进一步地,其特征在于,所述步骤二的子步骤2)中,所述交通信号灯为红绿灯,当红灯处于亮起状态时,将穿越人行道的行人判断为违规穿越人行道。
在一个具体实施例中,所述步骤二的子步骤3)中,穿行决策类型标签设置为数字“1”,等待决策类型标签设置为数字“0”。
进一步地,所述步骤三中,在训练基于SVM算法的行人横穿马路决策模型之前,随机选取所述穿行数据集中一定比例R的行人的数据和等待数据集中相同比例R的行人的数据作为训练数据集,其他数据作为测试数据集。
在一优选实施例中,所述比例R设置为80%。
进一步地,模型测试时,以测试数据集中某一测试数据点的行人的查看方向切换次数和保持侧视状态的时长作为输入变量,经过所述基于SVM算法的行人横穿马路决策模型计算并输出得到预测的行人决策类型标签,若预测的行人决策类型标签与实际决策类型标签相同,则对于该测试数据点,模型测试成功,否则失败。
其中,若测试成功的测试数据点的数量占测试数据集内数据点总量的比例超过预定阈值P,则模型精度可接受,建模成功。否则,需要采集更多试验数据进行模型训练。
在一优选实施例中,所述预定阈值P设置为85%。该阈值P根据模型精度需要进行设定,阈值P越大,模型精度越高。
由于采用上述技术方案,本发明达到以下有益效果:本发明通过采集实际行人横穿马路时的面部特征数据,以行人的查看方向切换次数和保持侧视状态的时长为自变量,以行人决策类型标签为因变量,基于SVM训练得到行人横穿马路决策模型,此方法数据计算量较少,实施简单,建模成本低廉。所建立的基于SVM算法的行人横穿马路决策模型,可准确预测行人的决策意图,克服了现有技术的缺陷。
附图说明
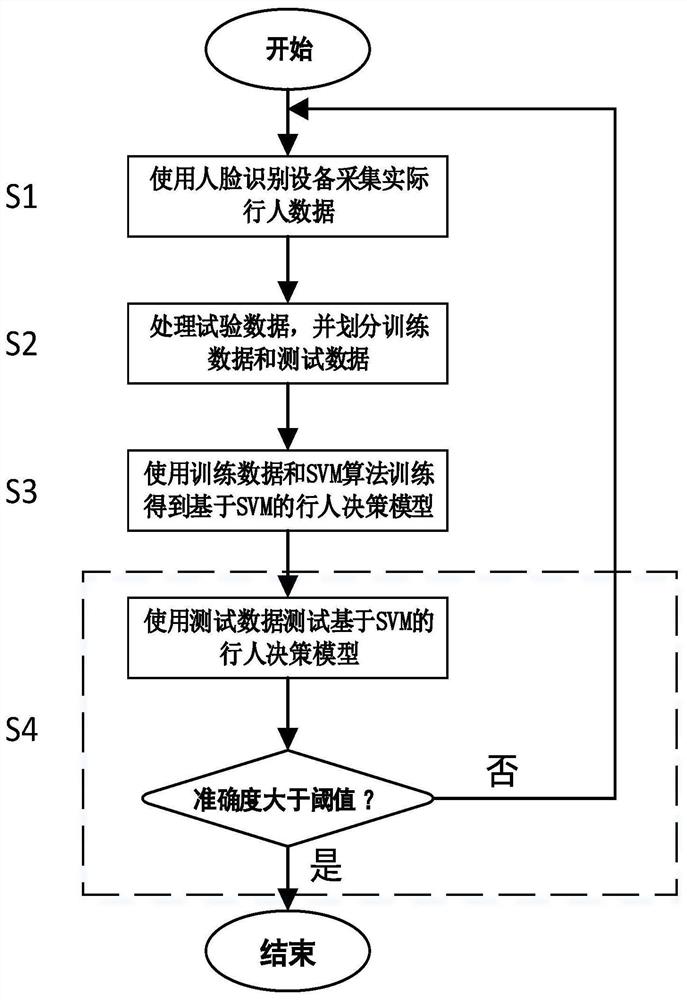
图1为根据本发明的基于SVM算法的行人横穿马路决策建模方法的步骤流程示意图。
图2为人行道外轮廓线向外偏移一定距离L后的行人检测区域示意图。
具体实施方式
为了使本技术领域的人员更好地理解本发明,下面将结合实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员所做的等效变化与修饰前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
请结合图1,本实施例提供一种基于SVM的行人横穿马路决策建模方法,包括如下步骤:
S1.使用人脸识别设备采集实际行人数据:
进行行人数据采集的场地包括但不限于包含有人行道和交通信号灯(本实施例为红绿灯)的交叉路口,通过预设的人脸识别设备采集多个实际行人横穿马路过程的面部特征数据,所述面部特征数据包括但不限于行人面部横摆角、面部俯仰角。本实施例中,人脸识别设备可采用可见光、近红外人脸采集于一体的人脸识别设备,譬如市售的华芸科技AI智能双目摄像头,型号为AI1901,将其安装在车辆上,即可用于对行人进行人脸识别。该人脸识别设备为现有技术,其具体结构和工作原理本领域技术人员已经悉知,这里不再赘述。
S2.处理试验数据,并划分训练数据和测试数据:
处理试验数据包括:
1)去除位于人行道外轮廓线向外偏移一定距离范围L=1m以外的行人的面部特征数据。如图2所示,本发明中要关心的是人行道外轮廓线向外偏移一定距离范围L以内的行人检测区域的行人,识别人行道外轮廓线A1,四周向外偏移L后得到行人检测区域A2。
2)根据行人穿行时是否违反交通信号灯,计算并提取违规穿越人行道的行人在开始穿行一段时间t=5s内的查看方向切换次数和保持侧视状态的时长,得到原始数据集;其中,行人的查看方向切换次数和保持侧视状态的时长是根据行人在开始穿行一段时间内的面部特征数据确定。本实施例中,对人行道外轮廓线和交通信号灯的识别均通过上述AI智能双目摄像头实现。
当面部俯仰角度大于一定阈值γ时,认为行人正在进行查看。
当脸部向左横摆角度大于一定阈值θ=30°、面部俯仰角度大于一定阈值γ=60°时,认为行人在向左查看;当脸部向右横摆角度大于一定阈值θ=30°、面部俯仰角度大于一定阈值γ=60°时,认为行人在向右查看。
当脸部向左横摆角度小于一定阈值θ=30°、脸部向右横摆角度小于一定阈值θ=30°、面部俯仰角度大于一定阈值γ=60°时,认为行人在向前查看。
查看方向切换次数指的是行人查看方向的切换次数,如,行人由向左查看变为向前查看,可视为一次查看方向的切换。
保持侧视状态的时长表示行人保持向左查看或保持向右查看状态的时长。
如图3所示,其表示人脸识别设备对行人面部特征数据计算时建立的坐标系,当人脸正对前方时,以人头中心为原点,前后方向为x轴,左右方向为y 轴,上下方向为z轴,面部横摆角为脸部左右摆动时x轴与y轴之间的夹角,面部俯仰角表示脸部仰视或俯视时,x轴与z轴之间的夹角。
划分数据步骤包括:
3)根据行人是否违规通过人行道,将所述原始数据集划分为穿行数据集和等待数据集,并在穿行数据集的数据中加入穿行决策类型标签,在等待数据集的数据中加入等待决策类型标签。
本实施例中,在穿行数据集中加入决策类型标签“1”,表示相关数据属于穿行决策类。在等待数据集中加入决策类型标签“0”,表示相关数据属于等待决策类。
4)随机选取穿行数据集中一定比例(R=80%)行人的试验数据和等待数据集中的相同比例人员的试验数据作为训练数据集,其他数据作为测试数据集。
S3.使用训练数据和SVM算法训练得到基于SVM的行人决策模型:
基于训练数据集和SVM算法,训练基于SVM算法的行人横穿马路决策模型时,将行人查看方向切换次数和保持侧视状态的时长为自变量,以行人决策类型标签为因变量。
S4.使用测试数据测试基于SVM的行人决策模型:
测试基于SVM的行人横穿马路决策模型时,以测试数据集中的测试数据点的行人查看方向切换次数和保持侧视状态的时长作为模型输入,经过该模型计算并输出得到预测的行人决策类型标签。若该预测决策类型标签与实际决策类型标签相同,则对于该测试数据点,决策模型预测成功,否则,失败。
本实施例中,测试成功的测试数据点的数量占测试数据集数据总量的 88.3%,也就是说测试成功的行人数量占总测试数据集内行人总量的比例为 88.3%,超过预定阈值P=85%,则说明经过以上建模方法训练得到的行人横穿马路决策模型的精度可接受,建模成功。否则,需要采集更多试验数据进行模型训练。
通过上述建模方法获得的行人横穿马路决策模型,在应用时,根据交通信号灯,当红灯亮起时,采集人行道外轮廓线向外偏移一定范围L=1m内的行人的面部特征数据,即面部横摆角和俯仰角,计算行人在一段时间内t=5s内的查看方向切换次数和保持侧视状态的时长,根据所建立的基于SVM算法的行人横穿马路决策模型,即可准确预测违规通过人行道的行人的决策类型,即穿行决策还是等待决策。
当模型预测行人的决策类型为穿行决策时,即系统识别到有行人横穿马路时,向驾驶员发出行人横穿马路的提示,使车辆及时减速避让行人,提升了车辆和周围行人的交通安全。
或者,当系统识别到有行人横穿马路时,就通知周围50m范围以内的车辆注意行驶安全。其中,将计算系统部署在云端,通过物联网系统采集相关摄像头的图像信息,处理识别到横穿马路行人后,将“注意违规行人”的消息发送到周围50n范围之内的车辆,显示在这些车辆的屏幕或者以语音形式告知。
相对于现有技术,本发明的建模方法成本低廉,数据采集便捷,且使用SVM 算法进行建模,所得模型计算量小、运算速度快,在一定程度上克服了现有技术的局限性。
以上所述仅为本发明较佳的实施方式,并非用以限定本发明的保护范围;同时,以上的描述对于相关技术领域中具有通常知识者应可明了并据以实施,因此其他未脱离本发明所揭露概念下所完成之等效改变或修饰,都应涵盖在本发明的保护范围之内。
- 一种基于SVM算法的行人横穿马路决策建模方法
- 一种基于SVM‑AdaBoost算法的行人检测方法