一种基于稀疏贝叶斯学习的机动阵列方位估计方法
文献发布时间:2023-06-19 10:54:12
技术领域
本发明涉及声纳探测技术领域,是一种基于稀疏贝叶斯学习的机动阵列方位估计方法。
背景技术
对远场目标进行方位估计是被动声纳系统的重要任务之一。近年来,声纳阵列被广泛安装于无人水下航行器等移动平台上。借助移动平台的机动性,直线声纳阵列方位估计中所固有的左右舷模糊问题可以得到有效解决。当平台发生机动时,声纳阵列的运动可以被分解为平移运动和阵列指向变化。与远场目标和平台之间的距离相比,阵列的平移运动距离可以被忽略。阵列指向变化会导致接收快拍中目标方位信息的时变,因而不能被忽略。对于许多传统的方位估计方法来说,如最小方差无失真响应波束形成(MinimumVariance Distortionless Response,简写为MVDR)、多信号分类(Multiple SignalClassification,简写为MUSIC)等,为了获得更好的估计性能,通常需要恒定的目标方位信息以完成协方差矩阵的精确构建。因此,在阵列机动的条件下,这些方法会性能退化甚至完全失效。
现有的机动阵列方位估计方法的基本思想是对阵列运动进行补偿。结合平台导航系统提供的阵列指向变化信息,采用一定的准则对接收信号导向矢量中阵列运动导致的目标方位信息变化进行补偿。然而,这类方法在低信噪比、小快拍数条件下的性能不甚理想。
发明内容
本发明为利用稀疏贝叶斯学习的思想解决机动阵列方位估计问题,本发明提供了一种基于稀疏贝叶斯学习的机动阵列方位估计方法,本发明提供了以下技术方案:
一种基于稀疏贝叶斯学习的机动阵列方位估计方法,包括以下步骤:
步骤1:根据声纳阵形和平台导航系统提供的阵列指向角,构建机动阵列稀疏信号模型;
步骤2:基于接收噪声的高斯分布假设,建立机动阵列稀疏贝叶斯学习框架,确定阵列接收信号的后验分布形式;
步骤3:根据阵列接收信号的后验分布形式,进行对数最大化操作,得到远场目标方位。
优选地,所述步骤1具体为:
步骤1.1:设定K个在大地坐标系下方向为θ={θ
其中,λ为信号波长,
通过下式表示阵列接收信号模型:
x(t)=A
x(t)=[x
s(t)=[s
n(t)=[n
A
其中,T表示总快拍数,n(t)表示阵列接收噪声,A
远场目标信号在实际观测空域内的分布是稀疏的,将水平面内的360°方向均匀离散成L个角度,即
优选地,所述步骤2具体为:
步骤2.1:由于阵列接收噪声是服从零均值的复高斯分布的,概率密度表示为
在稀疏贝叶斯学习框架下,设定信号幅度
其中,
对于多快拍数据,噪声n(t)和信号
X=[x(1),x(2),…,x(T)]
Λ=diag(γ)
其中,Λ为超参数γ中的元素构成的对角矩阵,
将似然函数与先验分布相乘,并对
其中,Σ
优选地,所述步骤3具体为:
步骤3.1:将阵列接收信号的后验分布形式取对数,通过下式表示所述对数:
其中,|·|表示矩阵的行列式,超参数通过对所述对数进行最大化得出,通过下式表示超参数:
当
对最小值通过迭代方法进行求解,定义
当
在迭代中,通过最大似然方法对σ
R
其中,P
本发明具有以下有益效果:
相比于现有方法,本发明利用稀疏贝叶斯学习的思想解决机动阵列方位估计问题,有效提升了方位估计精度和方位分辨能力,同时还能更有效地抑制左右舷模糊。采用本发明所设计的稀疏贝叶斯学习方法,可以在声纳阵列机动条件下,实现对远场目标信号的高精度、高分辨方位估计,同时能够解决左右舷模糊问题。
附图说明
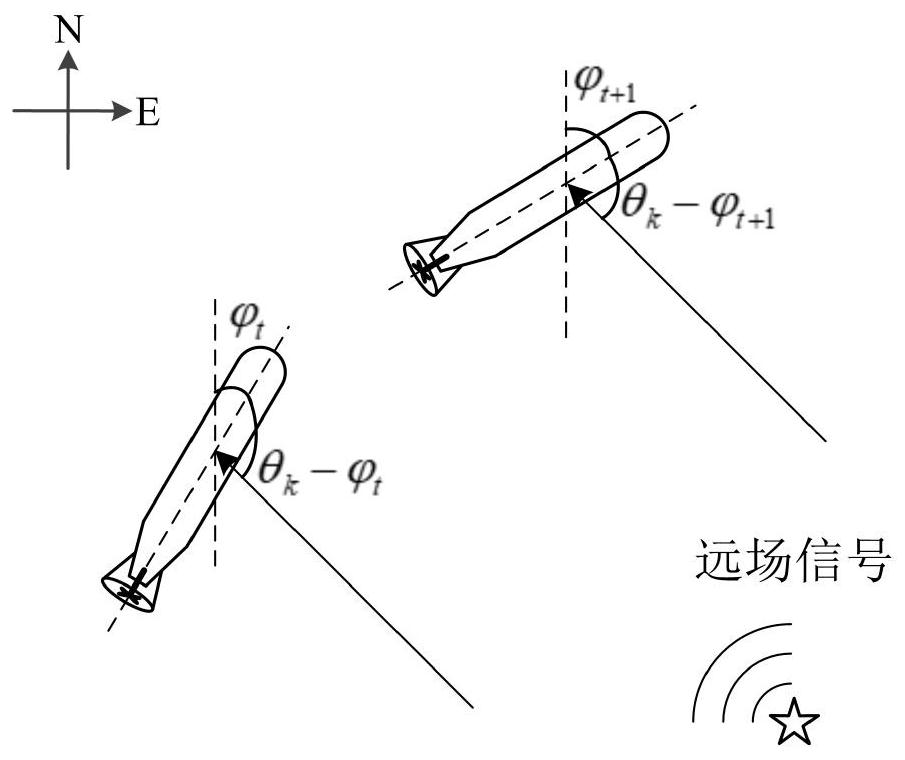
图1为机动阵列远场目标方位估计示意图;
图2为空间谱对比示意图;
图3为均方根误差随信噪比的变化情况示意图;
图4为均方根误差随快拍数的变化情况示意图;
图5为成功分辨概率随信噪比的变化情况示意图;
图6为成功分辨概率随目标角度间隔的变化情况示意图。
具体实施方式
以下结合具体实施例,对本发明进行了详细说明。
具体实施例一:
根据图1-图6所示,本发明提供一种基于稀疏贝叶斯学习的机动阵列方位估计方法,包括以下步骤:
一种基于稀疏贝叶斯学习的机动阵列方位估计方法,包括以下步骤:
步骤1:根据声纳阵形和平台导航系统提供的阵列指向角,构建机动阵列稀疏信号模型;
所述步骤1具体为:
步骤1.1:设定K个在大地坐标系下方向为θ={θ
其中,λ为信号波长,
通过下式表示阵列接收信号模型:
x(t)=A
x(t)=[x
s(t)=[s
n(t)=[n
A
其中,T表示总快拍数,n(t)表示阵列接收噪声,A
远场目标信号在实际观测空域内的分布是稀疏的,将水平面内的360°方向均匀离散成L个角度,即
步骤2:基于接收噪声的高斯分布假设,建立机动阵列稀疏贝叶斯学习框架,确定阵列接收信号的后验分布形式;
所述步骤2具体为:
步骤2.1:由于阵列接收噪声是服从零均值的复高斯分布的,概率密度表示为
步骤2.2在稀疏贝叶斯学习框架下,设定信号幅度
其中,
对于多快拍数据,噪声n(t)和信号
X=[x(1),x(2),…,x(T)]
Λ=diag(γ)
其中,Λ为超参数γ中的元素构成的对角矩阵,
步骤2.3:将似然函数与先验分布相乘,并对
其中,Σ
步骤3:根据阵列接收信号的后验分布形式,进行对数最大化操作,得到远场目标方位。
所述步骤3具体为:
步骤3.1:将阵列接收信号的后验分布形式取对数,通过下式表示所述对数:
其中,|·|表示矩阵的行列式,超参数通过对所述对数进行最大化得出,通过下式表示超参数:
当
对最小值通过迭代方法进行求解,定义
当
在迭代中,通过最大似然方法对σ
R
其中,P
本发明提出一种基于稀疏贝叶斯学习的机动阵列方位估计技术。当声纳阵列搭载于无人水下潜航器等移动平台上时,平台机动会使声纳阵列的指向发生时变。时变的阵列指向可以帮助解决直线阵列方位估计中存在的左右舷模糊问题,但同时也会导致传统方位估计方法的性能发生严重退化。针对这一问题,本发明提出一种基于稀疏贝叶斯学习的机动阵列方位估计方法。由于远场目标信号在大地坐标系下的方位近似不变,则不同阵列接收快拍中的空域稀疏信号具有相同的先验分布。基于这一事实,本发明首先建立机动阵列的稀疏信号模型;然后在贝叶斯框架下,联合对应着不同时变字典的多个接收快拍信息,得到后验概率分布;最后通过最大化后验概率分布求得远场目标方位。本发明在以下方面具有更好的性能:(1)能够提供更高的估计精度;(2)能够提供更好的方位分辨能力;(3)能够更加有效地抑制左右舷模糊。
具体实施例二:
机动声纳阵列对远场目标进行方位估计的示意图如图1所示。假设K个在大地坐标系下方向为θ={θ
其中,
x(t)=A
其中,T表示总快拍数,x(t)=[x
远场目标信号在实际观测空域内的分布是稀疏的,因此,多个目标信号的方位估计可以看作是一个稀疏信号的重建过程。根据稀疏理论,将水平面内的360°方向均匀离散成L个角度,即
具体步骤二:机动阵列稀疏贝叶斯学习框架建立。
由于阵列接收噪声是服从零均值的复高斯分布的,其概率密度可以表示为
在稀疏贝叶斯学习框架下,我们通常假设信号幅度
其中,
对于多快拍数据,噪声n(t)和信号
其中,X=[x(1),x(2),…,x(T)],
将式(6)表示的似然函数与式(7)表示的先验分布相乘,然后对
其中,Σ
具体步骤三:最大化后验分布完成目标方位估计。
将式(8)取对数,表示为
其中,|·|表示矩阵的行列式。超参数γ可以通过对式(10)进行最大化得出,表示为
当
式(12)可通过迭代方法进行求解。定义
当
其中,R
实施算例:
通过仿真实验对本方法的性能进行验证和分析,同时与波束域采样(WavefieldSampling,简写为WS)方法和空域导向协方差矩阵方法(Spatial SteeredCovariance Matrix,简写为SSTCM)进行对比。主要验证内容包括:方位估计方法的有效性,方位估计结果的均方根误差(Root Mean Square Error,简记为RMSE)随信噪比(Signal toNoise Ratio,简写为SNR)和快拍数的变化情况,以及方位估计方法对相邻目标信号的方位分辨能力。假设一个10元均匀线列阵,阵间距为半波长。快拍数设置为400,假设在该段时间内阵列指向角由0°变化为20°,即变化速度为0.05°/快拍。
首先,对在SNR=0dB以及SNR=-10dB下的几种方法的方位估计结果进行考察,假定有两个功率相同且互不相关的远场信号从120°与130°方向入射。空间谱对比如图2所示。从图2中可以看出,当SNR=0dB时,三种方法均可以分辨两目标。当SNR=-10dB时,由于SSTCM方法的方位分辨力随着SNR的下降而减弱,所以该方法失效。而本文方法与WS方法均可以分辨两目标。与另两种方法相比,在两种SNR条件下,本文方法均有着更尖锐的谱峰,并且对相邻信号的方位估计结果也更加准确。与此同时,可以根据图2的结果对几种方法的左右舷模糊抑制能力进行对比。当SNR=0dB时,SSTCM,WS和本方法的模糊信号最大峰值分别为-3dB,-12dB和-30dB。而当SNR=-10dB时,对应的峰值为-1dB,-5dB和-14dB。显然,与另两种方法相比,本方法的左右舷模糊抑制能力更强。
随后,考察几种方位估计方法的RMSE随SNR以及快拍数的变化情况。假定有两个功率相同且互不相关的远场信号从120°与140°方向入射。设置SNR从-10dB变化到10dB,在每种SNR下均进行200次独立的蒙特卡洛试验。RMSE定义为
其中,I为独立蒙特卡罗试验次数,K表示信源个数,θ
下面对不同方法的RMSE随快拍数的变化情况进行分析,其中,SNR被设置为0dB,快拍数由100变化至800,图4为200次蒙特卡洛试验得到的RMSE随快拍数变化情况。从图4中可以看出,当快拍数较少时,SSTCM方法的RMSE大于另两种方法。这是由于SSTCM方法对左右舷模糊的抑制能力较差,容易将模糊信号错判为目标信号。WS方法的RMSE一直大于本文方法。与另两种方法相比,本方法在方位估计精度方面有着明显优势。
最后,考察不同方法对相邻目标的分辨能力。假定有两个功率相同且互不相关的远场信号从120°与140°方向入射。设置快拍数为400,SNR从-10dB变化到10dB,在每个SNR下均进行200次蒙特卡洛试验得到最后统计结果。对于第i次蒙特卡洛试验,其方位估计结果满足下式,即可判断为成功分辨出两个目标。
成功分辨概率为满足上式的次数与总蒙特卡洛试验次数的比值。图5给出了双目标成功分辨概率随SNR的变化情况。从图5中可以看出,本方法在低SNR条件下的方位分辨性能更好。
接下来,设定SNR=10dB,两个信号的角度间隔从2°变化到10°,其余条件不变。图6为双目标成功分辨概率随目标角度间隔的变化情况,每个角度间隔下的蒙特卡洛次数为200次。从图中可以看出,当角度间隔较远时,三种方法均有着较高的成功分辨概率,当目标角度间隔较近时,本文提出方法的成功分辨概率更高,即可以分辨角度距离更近的两个信号。综上所述,本文方法相比于另两种方法,具有更高的方位分辨能力。
以上所述仅是一种基于稀疏贝叶斯学习的机动阵列方位估计方法的优选实施方式,一种基于稀疏贝叶斯学习的机动阵列方位估计方法的保护范围并不仅局限于上述实施例,凡属于该思路下的技术方案均属于本发明的保护范围。应当指出,对于本领域的技术人员来说,在不脱离本发明原理前提下的若干改进和变化,这些改进和变化也应视为本发明的保护范围。
- 一种基于稀疏贝叶斯学习的机动阵列方位估计方法
- 一种基于稀疏贝叶斯学习的天线阵列故障诊断方法