基于机器人视觉的多种混合板件的识别与喷涂方法
文献发布时间:2023-06-19 10:55:46
技术领域
本发明涉及家具行业混合板件喷涂领域,具体是基于机器人视觉的多种混合板件的识别与喷涂方法。
背景技术
机器人视觉作为当今机器人世界里最为活跃和富有挑战意义的研究领域之一,其研究内容和应用领域是相当广泛的,基于视觉的定位识别与路径规划技术是智能机器人的关键技术之一,根据目标物中心点的位置,通过相机获取喷涂板件图像,生成轨迹,实现机器人喷涂,在面对家具领域家具板件类型多样化,相对于仅仅通过人工进行喷涂,耗时费钱,效率低,普通机器人很难根据板件的类型自动实现不同喷涂路径的生成的劣势,基于机器人视觉的多种混合板件的识别与喷涂展现了更多的优势与前景。
发明内容
为了解决上述问题,本发明提出基于机器人视觉的多种混合板件的识别与喷涂方法。
基于机器人视觉的多种混合板件的识别与喷涂方法,包括:
S1:多种混合板件数据的获取:
a:完成相机的选型;
b:通过TCPIP通讯完成相机与机器人的通信;
c:开启相机,板件通过相机时,相机就会发出激光线获取数据;
S2:获取数据的处理:在数据处理时,对板件五个部分生成对应路径规划的数据,设置最小线段和最小圆弧两个参数来进行过滤,对于处理的数据按照不同的高度附加不同的RGB,为生成不同的路径规划做准备;
S3:工件数据的排序:针对混合板件的喷涂,图像的处理完成后,对板件进行排序,写一个工件排序的函数,把不同的工件的信息存到不同的object中,包含每一个object的物理信息以及平面坐标系的位置,为路径规划做准备;
S4:进行路径规划,形成喷涂轨迹:
a:对混合板件获取的数据进行路径规划,生成Line和Plane指令,生成的指令存储到Line和plane的结构体中;
b:当路径规划获取相应的数据后,按照目标程序的格式生成程序;
c:从相机获取的数据就按照程序格式进行程序的生成。
所述的步骤S1的a中对于相机的选型需要先得到对混合板件的类型,由于板件类型的形状不统一,同时获取板件的数据包含平板件、带凸起板件、带沟槽板件、以及畸形板件,选择的相机为能够识别出板件的厚度部分的3D相机。
所述的步骤S2中板件五个部分包含外边、内边、平面、沟槽、凸起。
所述的步骤S3的物理信息包含识别板件的长度、宽度、凸起的长度、沟槽的长度、板件在图像坐标系下的中心位置、板件的像素总值、板件的最大高度、最小高度、平均高度。
所述的步骤S4的程序格式具体是:CMA机器人目标程序为例,程序主要包含程序头、子程序头、子程序数据、指令头、指令数据。
本发明的有益效果是:通过选用3D相机实现对标准板件或畸形板件的数据获取,适用性广;对获取的板件数据进行处理,去除干扰以及过滤杂质,形成相应的图像,精准性高。
附图说明
下面结合附图和实施例对本发明进一步说明。
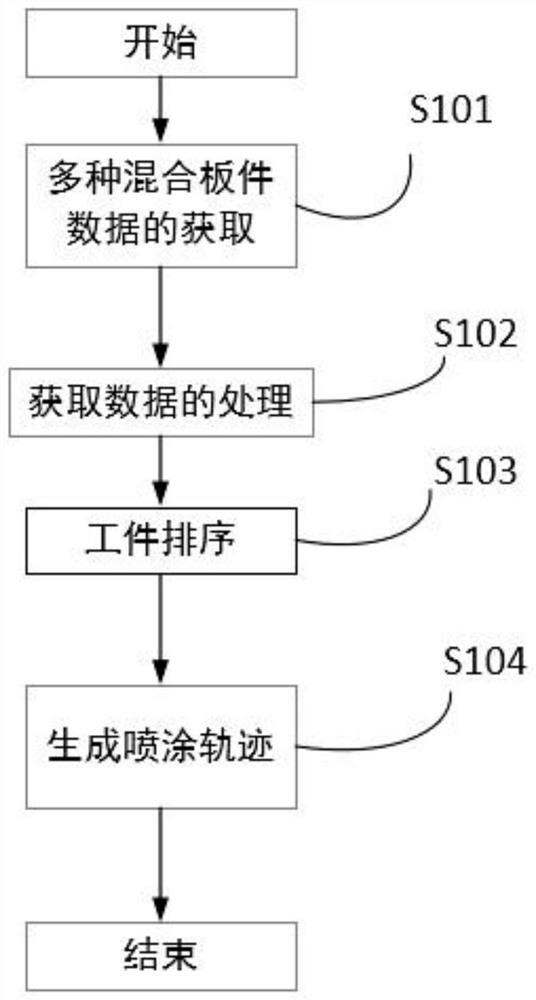
图1为本发明的流程结构框图;
图2为本发明的实施例喷涂示意图。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面对本发明进一步阐述。
如图1所示,基于机器人视觉的多种混合板件的识别与喷涂方法,包括:
S1:多种混合板件数据的获取:
a:完成相机的选型;
b:通过TCPIP通讯完成相机与机器人的通信;
c:开启相机,板件通过相机时,相机就会发出激光线获取数据;
S2:获取数据的处理:在数据处理时,对板件五个部分生成对应路径规划的数据,设置最小线段和最小圆弧两个参数来进行过滤,对于处理的数据按照不同的高度附加不同的RGB,为生成不同的路径规划做准备;
S3:工件数据的排序:针对混合板件的喷涂,图像的处理完成后,对板件进行排序,写一个工件排序的函数,把不同的工件的信息存到不同的object中,包含每一个object的物理信息以及平面坐标系的位置,为路径规划做准备;
S4:进行路径规划,形成喷涂轨迹:
a:对混合板件获取的数据进行路径规划,生成Line和Plane指令,生成的指令存储到Line和plane的结构体中;
b:当路径规划获取相应的数据后,按照目标程序的格式生成程序;
c:从相机获取的数据就按照程序格式进行程序的生成。
对于多种板件数据的获取,板件中包含凸起板件、凹槽板件、平板件,同时板件可以是标准板件,也可以是畸形板件。
按照工件排序以及处理后的图像进行路径规划,生成机器人喷涂轨迹,实现基于机器人视觉的多种混合板件的识别与喷涂。
所述的步骤S1的a中对于相机的选型需要先得到对混合板件的类型,由于板件类型的形状不统一,同时获取板件的数据包含平板件、带凸起板件、带沟槽板件、以及畸形板件,选择的相机为能够识别出板件的厚度部分的3D相机。
通过选用3D相机实现对标准板件或畸形板件的数据获取,适用性广;对获取的板件数据进行处理,去除干扰以及过滤杂质,形成相应的图像,精准性高。
所述的步骤S2中板件五个部分包含外边、内边、平面、沟槽、凸起。
因为板件中包含外边、内边、平面、沟槽、凸起五部分轨迹进行路径规划,才能完成一个板件的喷涂,所以在数据处理的时候要生成路径规划中五个部分的对应数据,无论是外边、内边、平面、沟槽还是凸起其最小组成部分是最小线段和最小圆弧来构成,所以在进行数据处理的时候,会设置最小线段和最小圆弧两个参数来进行过滤。
所述的步骤S3的物理信息包含识别板件的长度、宽度、凸起的长度、沟槽的长度、板件在图像坐标系下的中心位置、板件的像素总值、板件的最大高度、最小高度、平均高度。
因为该专利针对的是混合板件的喷涂,图像的处理完成后,要对板件进行排序,机器人的路径规划是按照顺序来生成,并不是一起进行路径规划。首先会写一个工件排序的函数,把不同的工件的信息存到不同的object中。
所述的步骤S4的程序格式具体是:CMA机器人目标程序为例,程序包含程序头、子程序头、子程序数据、指令头、指令数据。
如图2所示,选取相机作为图像采集的的外围设备,相机扫描Scan的位置。当工件通过Scan的位置,相机进行数据采集,然后通过Tcpip通讯发给Robot,机器人首先会根据获取的板件数据处理,按照上述的步骤生成轨迹,当板件到达喷涂位置时,机器人开始喷涂。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 基于机器人视觉的多种混合板件的识别与喷涂方法
- 基于机器人视觉识别的隧道结构健康智能识别系统和方法