一种道路健康巡检的智能车载系统
文献发布时间:2023-06-19 10:55:46
技术领域
本发明涉及道路巡检技术领域,特别是涉及一种道路健康巡检的智能车载系统。
背景技术
现有的智能巡检方式有激光路面巡检、实时抓拍巡检、三维路面抓拍巡检。
激光路面巡检是替代人工路面检测的比较早的尝试。其主要方案是,采用多探头激光检测技术或者激光转镜扫描检测技术扫描路面,通过分析激光散射光点到接收器距离得到路面横断面情况,以此检测路面各种问题。这种方案的问题是,价格高、无法适应多种车型,安装不方便,检测出来的数据不方便非专业人士复查、维护问题大、只能检测路面,不能检测路标等其它问题。
实时抓拍巡检是一种快速巡检的方法,巡检车在路面行驶时,边采集数据,边分析结果。这种方案问题是:图像抓拍面积大,误识别率高,且人工很难复查、识别后人工不方便找寻故障位置、对终端要求高,维护难度加大、难以生成有效巡检报表。
三维路面抓拍巡检采用双目相机,抓拍的数据为三维点云,一定程度能够识别裂缝深度。这种方案问题是:成本高,需要性能比较好的三维抓拍相机、检测内容有限,无法有效检测标志标牌。
发明内容
本发明的目的是提供一种道路健康巡检的智能车载系统,解决了道路检测不完整问题。
为实现上述目的,本发明提供了如下方案:
一种道路健康巡检的智能车载系统,包括:
中控模块、定位模块、前置抓拍模块和后置抓拍模块;
所述中控模块分别与所述定位模块、所述前置抓拍模块和所述后置抓拍模块连接;
所述定位模块用于采集车辆定位数据,并将所述车辆定位数据传输至所述中控模块;
所述前置抓拍模块用于采集车前方路面图片,并将所述车前方路面图片传输至所述中控模块;
所述后置抓拍模块用于采集车后方路面图片,并将所述车后方路面图片传输至所述中控模块;
所述中控模块用于根据所述车辆定位数据对应保存所述车前方路面图片和所述车后方路面图片。
可选的,还包括:
振动检测模块;
所述振动检测模块与所述中控模块连接;所述振动检测模块用于检测车辆两侧的振动数据,并将所述车辆两侧的振动数据传输至所述中控模块;所述中控模块用于根据所述车辆定位数据对应保存所述车辆两侧的振动数据。
可选的,还包括:
移动转储模块;
所述移动转储模块与所述中控模块连接;所述移动转储模块用于对采集到的数据进行备份;所述采集到的数据包括所述车辆定位数据、所述车前方路面图片、所述车后方路面图片和所述车辆两侧的振动数据。
可选的,还包括:
边缘计算模块;
所述边缘计算模块与所述中控模块连接;所述边缘计算模块用于根据训练好的模型对所述采集到的数据进行实时计算,并将计算结果传输至所述中控模块;所述中控模块用于保存所述计算结果。
可选的,还包括:
移动展示模块;
所述移动展示模块与所述中控模块连接;所述移动展示模块用于显示并交互所述中控模块的巡检操作界面。
可选的,还包括:
Wi-Fi上传模块;
所述Wi-Fi上传模块与所述中控模块连接;所述Wi-Fi上传模块用于上传数据至服务器;其中,上传的数据包括所述采集到的数据和所述计算结果。
可选的,还包括:
实时上传模块;
所述实时上传模块与所述中控模块连接;所述实时上传模块用于将未上传数据实时上传至所述服务器。
可选的,还包括:
电源模块;
所述电源模块分别与所述中控模块、所述前置抓拍模块、所述后置抓拍模块和所述振动检测模块连接;
所述电源模块用于向所述中控模块、所述前置抓拍模块、所述后置抓拍模块和所述振动检测模块供电。
与现有技术相比,本发明的有益效果是:
本发明提出了一种道路健康巡检的智能车载系统,包括中控模块、定位模块、前置抓拍模块和后置抓拍模块;中控模块分别与定位模块、前置抓拍模块和后置抓拍模块连接;定位模块用于采集车辆定位数据,并将车辆定位数据传输至中控模块;前置抓拍模块用于采集车前方路面图片,并将车前方路面图片传输至中控模块;后置抓拍模块用于采集车后方路面图片,并将车后方路面图片传输至中控模块;中控模块用于根据车辆定位数据对应保存车前方路面图片和车后方路面图片,解决了道路检测不完整问题。
此外,振动检测模块能够检测车辆两侧的振动数据,与前置抓拍模块和后置抓拍模块相配合,从而解决了道路检测不完整问题。这三个模块采集的数据可以进行相互校准,采集的数据不会漏掉地面图像,并且所有数据最终都会转移到服务器。依据这些原始数据,后台分析出结果后,可以人工再次确认结果。本发明采集的每张图片都单独带有一个实时定位位置,这为路面病害查重提供依据,也提高病害位置精度,方便人工找寻修复。本发明考虑到使用场景复杂,巡检人员技术水平不一,本系统日常运行无需技术干预,巡检人员可以方便的确认设备状态,巡检完后可以方便的转储数据。另外运行状态显示以及设备调整,可以通过移动展示模块,方便查看和调整。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
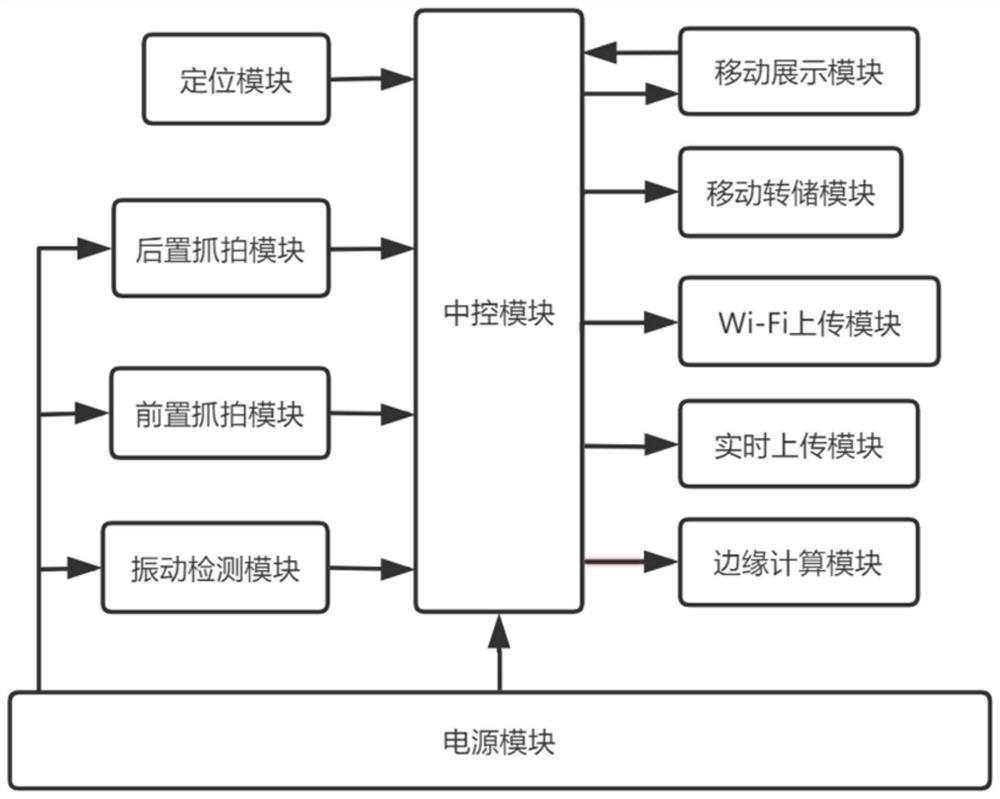
图1为本发明实施例中道路健康巡检的智能车载系统结构图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的目的是提供一种道路健康巡检的智能车载系统,解决了道路检测不完整问题。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
实施例
图1为本发明实施例中道路健康巡检的智能车载系统结构图,如图1所示,一种道路健康巡检的智能车载系统,包括:中控模块、定位模块、前置抓拍模块、后置抓拍模块、振动检测模块、移动转储模块、边缘计算模块、移动展示模块、Wi-Fi上传模块、实时上传模块和电源模块。
中控模块分别与定位模块、前置抓拍模块、后置抓拍模块、振动检测模块、移动转储模块、边缘计算模块、移动展示模块、Wi-Fi上传模块、实时上传模块和电源模块连接。中控模块用于管理其它模块,并作为唯一与服务器通信通道,同时存储采集到的数据。
电源模块用于向中控模块、前置抓拍模块、后置抓拍模块和振动检测模块供电。电源模块用于为道路健康巡检设备提供电能,并检测车辆电压情况,实时稳压,保证设备用电安全。车辆上电后,电源模块开始处理电压电流,把稳定的供电输入到系统,此时中控模块开始初始化系统参数,然后开始初始化各模块。
定位模块用于采集车辆定位数据,并将车辆定位数据传输至中控模块。定位模块用于高频采集车辆实时位置、记录实时车速、车辆高程以及方位角,采集的数据保存到中控模块数据库内,定位模块采用高精度定位;定位模块数据主要用于中控模块采集参数做参考使用,如果定位模块采集到的速度为0,则中控模块不会采集振动检测模块数据、后置抓拍模块数据、前置抓拍模块数据。另外,定位模块采集到的速度会作为后置抓拍模块数据采集频率的依据,即:速度乘以时间,高频(例如:每隔3毫秒)累积下,记录实时距离,当距离达到某一个值(例如:4米),则采集一张图片。额外的,定位模块的速度数据只会决定是否采集振动检测模块、前置抓拍模块数据,没有其它方面影响。中控模块初始化定位模块,定位模块搜索卫星,并通过ntrip协议,获取实时差分数据,获取差分数据后,校准厘米级定位,然后把厘米级高精度定位数据输送给中控模块,中控模块全局记录定位数据,并把定位数据保存到本地数据库内。
前置抓拍模块用于采集车前方路面图片,并将车前方路面图片传输至中控模块。前置抓拍模块用于抓拍路面以及路面周围景象,采用云台控制相机,可以软件调整抓拍角度,前置抓拍模块抓拍的图片主要用于分析路面标牌、路桥等抓拍频率固定为1秒1张。中控模块初始化前置抓拍模块,前置抓拍模块可视范围大概25米内,抓拍分辨率为1080P;抓拍后,输送给中控模块,中控模块压缩图片,并把图片保存到指定路径,把图片相关信息保存到数据库。
后置抓拍模块用于采集车后方路面图片,并将车后方路面图片传输至中控模块。后置抓拍模块用于抓拍车后路面,抓拍根据车辆速度,每隔一段时间计算模糊距离,累积到一定距离后,抓拍一张图片,抓拍的图片保存到中控模块存储区内,后置抓拍模块抓拍的图片主要用于分析道路裂缝、变形、坑槽、井盖等。中控模块初始化后置抓拍模块,后置抓拍模块根据一定距离,此距离为可变距离,根据每一辆车的后置摄像头校准距离(即摄像头采集图片覆盖路面长度)而变化;后置抓拍模块抓拍的图片输送给中控模块,中控模块结合当前定位模块数据,把图片保存到存储路径下,另外把与图片相关信息(例如:图片名称、路径、时间、定位数据)保存到本地数据库。中控模块用于根据车辆定位数据对应保存车前方路面图片和车后方路面图片。
振动检测模块用于检测车辆两侧的振动数据,并将车辆两侧的振动数据传输至中控模块;中控模块用于根据车辆定位数据对应保存车辆两侧的振动数据。振动检测模块用于检测车辆两边振动数据,振动检测模块为两个,分别分布在车辆左侧位置和右侧位置,用于采集车辆两侧的加速度数据;分析服务器会根据加速度Z轴变化规律来分析路面凹凸情况。中控模块初始化振动检测模块,振动检测模块采集两个振动检测设备,采集频率为250次每秒,采集的数据组包输送给中控模块,中控模块把振动检测数据及相关信息保存到数据库。
移动转储模块用于对采集到的数据进行备份;采集到的数据包括车辆定位数据、车前方路面图片、车后方路面图片和车辆两侧的振动数据。移动转储模块用于备份实时采集的数据,中控模块在保存各设备数据时,同时备份一份在移动转储模块中,当车辆完成巡检后,可直接拔掉移动转储模块,供数据分析。中控模块初始化移动转储模块,中控模块保存采集数据时,首先会保存到本地硬盘,然后检测移动上传模块是否有移动介质插入,如果有移动介质插入,则把本地硬盘数据从本地硬盘实时复制到移动介质。
边缘计算模块用于根据训练好的模型对采集到的数据进行实时计算,并将计算结果传输至中控模块;中控模块用于保存计算结果。边缘计算模块用于实时计算采集到的数据,采集到的数据保存到中控模块后,边缘计算模块使用训练好的模型对数据进行实时分析,并在移动展示模块进行显示并传输到本地以及发送到服务器。中控模块初始化边缘计算模块,当中控模块启动采集数据,并保存到本地硬盘后,边缘计算会自动找到未分析计算条目,然后根据模型,推理出结果,并把记录保存到本地硬盘,中控模块获取到新增结果后,实时传送到服务器。
移动展示模块用于可移动显示并交互中控模块的巡检操作界面。移动展示模块分为被控端与控制端,控制端一般为平板电脑,被控端存在于与中控模块连接的部位。被控端与控制端一般通过Wi-Fi连接,移动展示模块用于显示并交互中控模块的界面。中控模块初始化移动展示模块被控端,被控端获取系统桌面数据,并等待控制端请求连接;控制端打开连接后,被控端像控制端发送实时桌面数据,并响应控制端相关控制指令,例如:点击、输入、拖动等。
Wi-Fi上传模块用于上传数据至服务器;其中,上传的数据包括采集到的数据和计算结果。Wi-Fi上传模块用于上传数据到服务器,车辆巡检完后,把车辆停放在预先布置好的Wi-Fi信号覆盖范围内,中控模块自动把数据上传至服务器。中控模块初始化Wi-Fi上传模块,当车辆到达指定Wi-Fi覆盖位置后,Wi-Fi上传模块连接指定服务器,并把此次采集任务的数据,包括定位模块数据、后置抓拍模块数据、前置模块抓拍数据、振动检测数据等,一并上传到服务器;当上传中断时,Wi-Fi上传模块会检测未上传的记录,然后继续上传未上传的数据。
实时上传模块用于将未上传数据实时上传至服务器。实时上传模块用于实时采集,实时上传数据到服务器。中控模块初始化实时上传模块,初始化后,当中控模块开始采集数据时,刚采集的数据都默认为未上传数据,实时上传模块检测到未上传数据,则逐步上传,成功上传数据,则记录成功上传标志。
移动转储、Wi-Fi上传和实时上传这三种数据传输方式并不一定会同时启动,根据客户要求,有时候只会启动移动转储模块,有时候只会启动实时上传模块,有时候只会启动Wi-Fi上传模块,或者会启动这三个模块之中的两种。一般情况下,即使这三个模块都不启动,或者启动其中的一个或几个,本地存储是会一直启动的。
本发明提供的道路健康巡检的智能车载系统,具有以下优点:
1、准确率高
可分析数据来源于三部分,分别是前置抓拍模块、后置抓拍模块、振动检测模块。三者数据可以进行相互校准,采集的数据不会漏掉地面图像,并且所有数据最终都会转移到服务器,另外对于隧道等光线弱的路面,系统还可以进行红外补光,以保证抓拍的图像清晰。依据这些原始数据,后台分析出结果后,可以人工再次确认结果。
2、精度高
定位模块采用四星八频设备,读取频率为20次/秒。另外定位模块对接千寻,进一步提高定位精度。根据定距离采集机制,采集的每张图片都单独带有一个实时定位位置,这为路面病害查重提供依据,也提高病害位置精度,方便人工找寻修复。
3、安全性高
全系统采用单一总电源宽压输入,用电安全,电源模块单独定制,实现短接保护,过载保护。过电接口都采用工业定制接口。采集到的数据可以根据客户要求,进行加密存储,可以通过移动转储模块离线保存、Wi-Fi上传模块局域网上传、实时上传模块公网传输等,一定程度上保证数据安全。
4、使用方便
考虑到使用场景复杂,巡检人员技术水平不一,本系统自部署之后,专业操作都转移到远端,日常运行无需技术干预,巡检人员可以方便的确认设备状态,巡检完后可以方便的转储数据。另外运行状态显示以及设备调整,可以通过移动展示模块,方便查看和调整。
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上,本说明书内容不应理解为对本发明的限制。
- 一种道路健康巡检的智能车载系统
- 一种智能道路巡检机器人