应用于光学相干弹性成像的传感器、成像系统及成像方法
文献发布时间:2023-06-19 10:58:46
技术领域
本发明涉及光学相干弹性成像技术领域,尤其是指一种应用于光学相干弹性成像的传感器、成像系统及成像方法。
背景技术
光学相干弹性成像(optical coherence elastography,OCE)是一种新型的生物医学弹性成像技术,它利用光学相干层析成像(optical coherence tomography,OCT)设备探测组织承受负载后沿深度方向的变形响应,以组织的杨氏模量、应力与应变等弹性参数为成像对象。对比于目前较为成熟的超声弹性成像和磁共振弹性成像,OCE除了生产成本的优势,更是保持了 OCT的高分辨率、非侵入式等优点,能够提供远高于超声弹性成像和磁共振弹性成像的成像分辨率以及机械灵敏度,在采集速度方面,OCE可以提供高速的三维扫描成像。目前很多研究已经证明OCE有能力提供有关组织的微机械性质,它不仅能显示明胶样品、人体皮肤和猪肌肉在负载压缩下的微观变形,还能对血管动脉进行弹性成像,对不同血流速度和血管应变下的含异物血管进行鲁棒性估计。
目前的OCE研究有多种负载激励方式。静态的为压缩型,这是一种直接也容易实现的加载方法,一般利用环形制动器在轴向进行加载压缩,样品中轴向的变化可以在两次数据采集之间应用负载所带来的变化来计算应变。典型的压缩型OCE无法实现量化,只能定性分析样品。在此基础上,也有研究将柔性层放置于样品表面,利用柔性层的切线模量特性来评估样品的弹性模量。动态激励有多种方式,包括声辐射力、声表面波、剪切波等。声辐射力利用超声换能器产生周期性的声波脉冲对样品产生动态激励,这种方式较难获取声辐射力的强度,不能对样品进行定量分析。声表面波是样品受到脉冲激励后,在样品内传播的机械波,通过研究波的相速,可以直接获取样品的杨氏模量,但是存在分辨率低的问题。剪切波是利用超声换能器产生的脉冲在样品上产生的垂直于声波传播方向的横波,通过获取剪切波速度可以得到样品的杨氏模量,它有很高的横向分辨率,但是成像范围有所限制。
发明内容
为此,本发明所要解决的技术问题在于克服现有技术中无法同时获取样品的弹性模量定量分析和无损成像。
为解决上述技术问题,本发明提供了一种应用于光学相干弹性成像的传感器,包括:
刚性件,所述刚性件内部贯穿开设有安装孔;
透光件,所述透光件位于所述安装孔内;
弹性连接件,其设置在所述透光部与所述刚性件之间;
其中,所述透光件上凸出设置有抵压部,所述抵压部高于所述弹性连接件和透光件;当所述抵压部抵压样品时,所述弹性连接件变形以使得透光件位移,通过采集所述透光件出射的光线的光学特性变化以获取样品的机械特性。
作为优选的,所述弹性连接件通过3D打印获取。
作为优选的,所述弹性连接件包括多条,多条所述弹性连接件环绕所述透光件等间距分布。
本发明公开了一种成像系统,包括上述的传感器。
作为优选的,还包括:
扫频光源,其发出第一光束;
分光组件,所述分光组件将所述第一光束分解成参考光束和测试光束;
样品检测组件,所述样品检测组件包括第一准直透镜、扫描振镜和消色差透镜,所述测试光束经第一准直透镜后入射在扫描振镜上,所述扫描振镜的出射光经所述消色差透镜聚焦在样品上,获得样品的反射光,其中,所述传感器位于样品与消色差透镜间;
干涉组件,所述样品的反射光与参考光束在干涉组件处干涉,获得干涉光;
光探测器,所述光探测器获取所述干涉光的光学信息。
本发明公开了一种成像系统的测试方法,基于上述的成像系统,包括以下步骤:
S1、获取传感器的受力与光探测器采集的图像的位移关系e'
S2、使用所述传感器的抵压部抵压样品,所述光探测器采集传感器的抵压部抵压样品的状态下的测试图像,获取测试图像的成像位移d
S3、根据传感器的受力与光探测器采集的图像的位移关系和测试图像的成像位移,获取样品的切线模量E,
其中,
作为优选的,所述获取测试图像的成像位移,包括:
当测试图像的成像位移大于成像图像的像素时,通过读取图像中成像位置变化获取成像位移;
当测试图像的成像位移小于成像图像的像素时,获取成像图像的相位变化,根据成像图像的相位变化获得成像位移。
作为优选的,所述当测试图像的成像位移小于成像图像的像素时,获取成像图像的相位变化,根据成像图像的相位变化获得成像位移,包括:
成像位移
作为优选的,所述获取样品的应变,包括:
当测试图像的成像位移大于成像图像的像素时,获取抵压部抵压样品时样品的厚度变化,根据样品的厚度变化获得样品的应变;
当测试图像的成像位移小于成像图像的像素时,获取成像图像的相位变化,根据成像图像的相位变化获得样品的应变。
作为优选的,所述当测试图像的成像位移小于成像图像的像素时,获取成像图像的相位变化,根据成像图像的相位变化获得样品的应变,包括:
样品的应变
其中,Δφ(x,z)为B-scan之间的相位变化,λ
本发明的上述技术方案相比现有技术具有以下优点:
本发明提出了一种新的具有可行性和精确性的光学相干弹性成像系统,为组织的弹性模量定量分析和成像一体化提供了研究与分析,成像效果好,方便快捷。
本发明面向实际应用,可用于实际生物医学领域的弹性模量测量。
附图说明
图1是本发明传感器的结构示意图;
图2光学相干弹性成像系统的结构图;
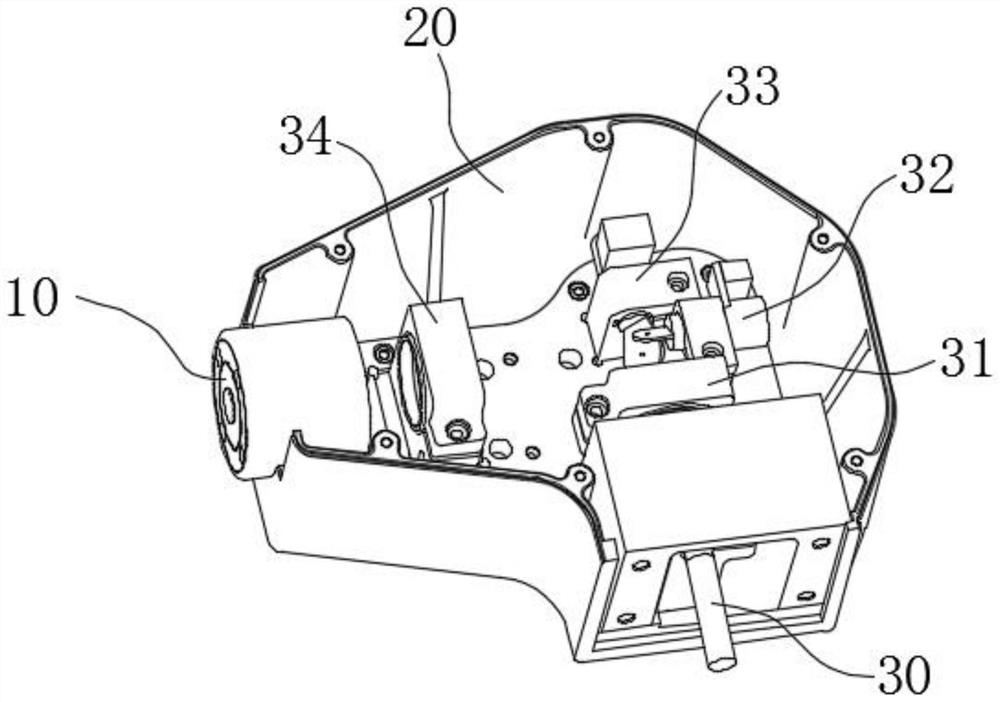
图3为手持式样品臂的剖面视图;
图4为手持式样品臂的结构示意图;
图5为COMSOL仿真设计示意图,其中,(a)为传感器结构设计示意图;(b)为传感器两种结构示意图:情况1为窗口上下凸出0.5mm,结构 2为窗口向下突出1mm;(c)为图(b)中两种情况的传感器仿真结果;(d) 根据3D打印材料不同的结构设计的不同的传感器结构示意图,包含:二条幅结构、四条幅结构、六条幅结构、全包围结构;(e)为图(d)中四种结构传感器仿真结果;
图6(a)大位移情况下OCT图像位移校准曲线;(b)连续多个B-scan 相位变化图;
图7(a)传感器实物图,(b)位移大的情况下传感器实测力-位移曲 线和仿真力-位移曲线对比,(c)位移小的情况下测力计测量传感器力-时间 曲线,(d)根据OCT相位和多普勒速度获取的多次力-时间关系平均值;
图8位移大的情况下测量样品力-位移关系示意图,其中,(a)为初始状态下的B-scan,d1为此刻厚度,(b)为加载后某个状态下的B-scan,d2为此刻厚度;
图9为两种样品校准图,其中,(a)硅胶:硅油为1:1材料用测力计获取的力-位移曲线;(b)硅胶:硅油为1:1材料用传感器获取的力-位移曲线;(c)硅胶:硅油为1:1.55材料用测力计获取的力-位移曲线;(d) 硅胶:硅油为1:1.55材料用传感器获取的力-位移曲线;
图10(a)单层样品B-scan;(b)经过加权平均并填充阈值的相位变化图;(c)轴向相位解包裹图;(d)单层样品应变图。
说明书附图标记说明:10、传感器;11、刚性件;12、透光件;13、弹性连接件;20、壳体;30、第一准直透镜;31、衰减片;32、长振镜;33、短振镜;34、消色差透镜;40、手柄。
具体实施方式
下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好地理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
参照图1所示,本发明公开了一种应用于光学相干弹性成像的传感器10,包括刚性件11、透光件12和弹性连接件13。刚性件11内部贯穿开设有安装孔。透光件12位于安装孔内。弹性连接件13设置在透光部与刚性件11之间。其中,透光件12上凸出设置有抵压部,抵压部高于弹性连接件13和透光件 12。当抵压部抵压样品时,弹性连接件13变形以使得透光件12位移,通过采集透光件12出射的光线的光学特性变化以获取样品的机械特性。
本发明中,传感器的外形设计类似于汽车轮毂。最外圈为用来固定的金属圈,最内为成像窗口,即设置成透光件,而刚性件与透光件之间的是具有一定柔软度的3D打印材料,这三者之间用专用的胶水进行粘合,保证其上平面基本持平,透光件上凸出设置有抵压部。在抵压部与样品接触受力时,弹性连接件会带着成像窗口(透光件)一起运动,同时样品内部会存在一定的应变,不管是像素级的位移变化还是亚像素级的相位变化,都能表现在OCT图像中。窗口表面位移可以获取此时的应力,这也代表着样品所受的应力。通过COMSOLMultiphysics仿真来对传感器的结构、不同材料进行优化和分析,并利用传感器实物进行实际的力-位移校准,可以从理论和实际实验验证其可行性。其次需要利用标准样品对次系统进行实验验证。在位移较大的情况下,本发明直接读取B-scan中的窗口位移和样品的压缩量,可以直接获取样品的机械特性。而在发生亚像素内的位移时,可以分析样品和窗口表面相隔B-scan的相位变化来获取样品的性质。
本发明中,弹性连接件可通过3D打印获取。弹性连接件13包括多条,多条弹性连接件环绕透光件12等间距分布,如此,整个传感器的稳定性和传感精度更高。当然,弹性连接件13也可为圆环形结构,其设置在透光件12 与刚性件11之间。
参照图2所示,本发明还公开了一种成像系统,包括上述的传感器,通过设置上述传感器,可以实现组织的弹性模量定量分析和成像一体化分析。
成像系统包括扫频光源、分光组件、样品检测组件、干涉组件、光探测器。
扫频光源发出第一光束,而分光组件将第一光束分解成参考光束和测试光束;样品检测组件包括第一准直透镜、扫描振镜和消色差透镜,测试光束经第一准直透镜后入射在扫描振镜上,扫描振镜的出射光经消色差透镜聚焦在样品上,获得样品的反射光,其中,传感器位于样品与消色差透镜间;样品的反射光与参考光束在干涉组件处干涉,获得干涉光;光探测器获取干涉光的光学信息。
下面,对本发明的成像系统的搭建、使用及实验论证进行详细的说明。
(1)SS-OCT系统搭建
本发明所设计的SS-OCT系统主要由扫频光源,样品臂,参考臂,平衡探测器组成,如图2所示。采用中心波长为1060纳米,实际使用带宽为37nm 的扫频光源作为光源,其输出被50:50光纤耦合器分成两路,分别导入到样品臂与参考臂,然后分别经过透镜进行准直。参考臂即对应上述样品检测组件。平衡探测器即对应上述光探测器。参考臂上的光经过两个准直器后返回,样品臂搭载在手持式系统上,样品臂上的光需要先经过振镜,然后通过透镜聚焦到被测样品表面,通过控制振镜振幅,实现对样品X-Y面的扫描。从样品臂上反射回来的后向散射光在光纤耦合器中与参考臂反射回来的光进行干涉,并由平衡探测器接收。对于图2中,SS表示扫频光源;FC表示光纤耦合器;L表示消色差透镜;M表示平面反射镜;CL表示准直透镜;BD表示平衡探测器;GS表示扫描振镜。
手持式系统搭载为样品臂,主要包括准直器、振镜、自主设计的传感器等,设计示意图如图3和图4所示。样品臂的加载方法主要利用准静态方法,将手持式系统负载在高精度线性平移台上,对样品进行负载,线性平移台的最小步长为10nm,最小运动速度为3um/s,通过平移台控制软件对其进行步长和运动速度的设置,使其能对样品进行加压,为了减少平台对样品弹性测量的影响,保证均匀的负载,需要在样品底部放置刚性平台,使样品与底层刚性平台平行。如图3所示,样品臂包括壳体20,在壳体20内安装有传感器10、短振镜33、长振镜32、衰减片31和第一准直透镜30,测试光经第一准直透镜30准直后,再经衰减片31射入至扫描振镜上,扫描振镜包括长振镜32和短振镜33,经扫描振镜调制后的测试管经消色差透镜34射入传感器10的透光件12,从透光件12出射的光射入样品,样品的反射光再经原光路返回。参照图4所述,壳体20安装在手柄40上,手柄40方便拿取。
(2)SS-OCT数据采集与处理
扫频OCT系统的数据采集需要光源的输出、数据采集卡以及扫描振镜系统之间的同步。扫频激光光源输出K-clock信号和A-trigger信号两路信号,作为数据采集卡的外部时钟信号Trigger信号在光源进入扫描周期时输出,数据采集卡与NI控制卡同时接受此信号,数据采集卡开始采集数据,NI控制卡输出振镜控制模拟信号驱动扫描振镜。同时间,将另一路的K-clock信号作为数据采集卡的外部时钟信号,以实现光谱在K空间的等间隔采样,即采集到等间距的信号。对于采集到的OCT干涉信号数据,需要对其进行加汉宁窗进行光谱整形,后经傅里叶变化可以得到信号中各种不同频率分量的信号强度,重建出二维图像。
(3)COMSOL仿真理论分析
COMSOLMultiphysics为有限元仿真软件,可以提供多物理场接口,满足不同学科领域的研究需求。本发明仿真设计采用结构力学中的固体力学模块,利用稳态研究针对本次设计的传感器进行分析。如图5(a)所示,在构建完几何模型后,需要进行材料参数设置。本次设计暂时选取内置材料并修改了其中的参数。由于实际应用时外圈需要固定不产生位移,所以本发明选用硬度较大的金属材质,而中心部分的球或者圆柱,由于要实现成像功能,所以采用玻璃材质,环绕着中心球的辐条选用硬度较小的硅胶材质,可通过3D打印获取,其杨氏模量根据实际多次重复测量调整为3.5MPa。
仿真中,对传感器中的边界条件主要集中于外圈钢圈的固定约束和玻璃窗口的实力,为了和实际实验以及校准实验相一致,窗口上的边界条件设置为z方向的固定位移,并通过辅助设置获取了不同结构的传感器的力学分析。在传感器中,窗口位置的外凸部分影响着实际实验方便与否,同时也会有实验精度的影响,在图5(b)中,通过一种上边界齐平下边界外凸1mm和另一种上下外凸0.5mm的仿真结果对比,如图5(c),这两者结构存在不同的结果,第一种在实际操作中更为方便。除此之外,在同等条件下,对于不同结构的传感器,力-位移的分析也进行了优化设计,如图所示5(d)。仿真结果中可以看出3D打印柔性材料越多,其灵敏度越低,这是符合力学规律的,如图5(e)。实际使用过程中,本发明可以根据实验的具体情况和被测对象的要求,选取不同的传感器来获取准确的实验数据。在本次设计过程中,本发明选取了柔性材料全包围的传感器结构来进行实验。
(4)校准实验设计
图像中的位移和实际位移进行校准,考虑到位移的大小在图像中不同的表现方式,分别用边缘读取和相位分析的方式进行了两次图像位移的校准,将手持式光学相干弹性成像系统搭载在电动平移台上,利用在成像范围内的载玻片来读取图像中的位移变化,其中电动平移台精度为10nm,充分满足实验需求。如图6所示,其中,在步长较大的情况下,本发明利用载玻片在图像中的像素位置变化来获取图像中的位移。图像中原始像素大小为5.53um,为了使读数精确,我们对像素个数进行了填充,使像素大小缩小为0.61um。图 6(a)中,图像中的位移和实际位移之比为0.99,接近于1,充分证明了图像中位移的校准。其次,在位移不超过像素大小的情况下,需要利用OCT信号的相位来进行位移的分析。根据多普勒OCT的原理,运动引起的移动散射体的速度表达式为:
其中,Δφ是相邻n个B-scan的相位变化,n在本次实验中分别取为1、2、 3、4,λ
光学相干层析成像(OCT)属于一种高灵敏度、高分辨率、高速度、无入侵的断层扫描成像方式,其利用光的相干性对待测物体进行扫描成像,每次扫描被称为一个A-scan,相邻连续的多次扫描组合在一起称为一个B-scan, B-scan即OCT截面图,其包含了待测物体的深度方向和横向的截面信息。
实际传感器实物图如图7(a)所示。将其固定在光学成像平台上,用10N 量程的测力计对传感器中的力-位移进行校准,力由测力计读出,窗口的位移由OCT图像中获取,位移较大的情况下进行多次测量,校准结果如图7(b)。使用COMSOL仿真的传感器力-位移的关系即斜率和实验测量斜率基本一致,但是起始情况存在一定的偏移,这是和传感器实际制作以及窗口有一定的倾斜角度有关。在位移较小的情况下,即位移不超过像素范围,需要运用多普勒OCT的原理,计算图像中力-时间的关系,与测力计读出的力-时间的关系进行对比。分别选取7个不同时间段计算图像中传感器的力-时间的关系,如图7(d),虽然计算出的力-时间关系有上下波动,这可能是系统的不稳定性引起的,7次计算的平均力-时间关系值为0.036N/s,这和从测力计中读出的力- 时间的斜率是一致的,如图7(c)所示。
在另一实施例中,本发明公开了一种成像系统的测试方法,基于上述的成像系统,包括以下步骤:
步骤一、获取传感器的受力与光探测器采集的图像的位移关系e'
步骤二、使用传感器的抵压部抵压样品,光探测器采集传感器的抵压部抵压样品的状态下的测试图像,获取测试图像的成像位移d
具体的,获取测试图像的成像位移,包括:当测试图像的成像位移大于成像图像的像素时,通过读取图像中成像位置变化获取成像位移。
成像位移
具体的,获取样品的应变,包括:当测试图像的成像位移大于成像图像的像素时,获取抵压部抵压样品时样品的厚度变化,根据样品的厚度变化获得样品的应变;当测试图像的成像位移小于成像图像的像素时,获取成像图像的相位变化,根据成像图像的相位变化获得样品的应变,样品的应变:
其中,Δφ(x,z,t)为B-scan之间的相位变化,λ
步骤三、根据传感器的受力与光探测器采集的图像的位移关系和测试图像的成像位移,获取样品的杨氏模量E,
其中,
下面,结合具体的实验验证对本发明中的测试方法进行进一步说明。
首先将2%(w\w)的微米级TiO
在图像中,假设轴向应力均匀,窗口表面受力的位移为d
在窗口位移和样品压缩较大的情况下,窗口上的位移可以通过直接读取图像中对应的位置变化获取,而样品的应变可以直接计算样品的厚度变化 d
在位移不超过像素范围时,可以获取加载过程中图像的相位变化来估计窗口和样品的变化。
其中,Δφ(x,z,t)为B-scan之间的相位变化,λ
使用相位图进行样品的应变估计时,当压缩程度达到一定范围,会引起轴向范围内的相位包裹,需要使用二维相位解包裹,得到轴向无包裹时的相位变化,然后使用加权最小二乘法去估计应变。
对于二维相位解包裹可参考文献:Kennedy,B.F.,et al.(2014)."Opticalcoherence micro-elastography:mechanical-contrast imaging of tissuemicrostructure."Biomedical Optics Express 5(7):2113-2124。
对于用加权最小二乘法去估计应变,可参考文献Kennedy,B.F.,et al. (2012)."Strain estimation in phase-sensitive optical coherence elastography." BiomedOpt Express 3(8):1865-1879。
图10所示为应变处过程,其中图10(a)、(b)为B-scan和相位变化图,图10(c)为轴向解包裹后的图,图10(d)为估计的应变图。
由此,采用上述所示手持式光学相干弹性成像系统,可以实现样品的弹性模量定量分析和无损成像,在实际应用中具有可行性。
本领域内的技术人员应明白,本申请的实施例可提供为方法、系统、或计算机程序产品。因此,本申请可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本申请可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、CD-ROM、光学存储器等)上实施的计算机程序产品的形式。
本申请是参照根据本申请实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
显然,上述实施例仅仅是为清楚地说明所作的举例,并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
- 应用于光学相干弹性成像的传感器、成像系统及成像方法
- 一种应用于光学相干断层扫描血管成像方法及OCT系统