无人机控制方法
文献发布时间:2023-06-19 11:00:24
技术领域
本发明涉及无人机飞行控制技术领域,特别涉及一种无人机控制方法。
背景技术
传统的无人机主要通过控制机身前倾来使得无人机前飞,具体的无人机控制方法中。
然而导致前飞时,机身倾斜,导致机身产生较大的阻力,进而对无人机的飞行速度和续航时间造成不利影响。且在巡航过程中需要工作人员实施对无人机传输控制信号,控制无人机飞行状态。
因此,如何在减小无人机巡航模式时飞时机身产生的阻力的同时,降低使用者劳动强度,是本领域技术人员亟待解决的技术问题。
发明内容
本发明的目的是提供一种无人机控制方法,在减小无人机巡航模式时飞时机身产生的阻力的同时,降低使用者在无人机巡航模式时劳动强度。
为实现上述目的,本发明提供一种无人机控制方法,包括步骤:
通过控制系统设置无人机的飞行模式;
所述飞行模式包括巡航模式和工作模式,所述巡航模式时所述无人机的螺旋桨轴线向上延伸方向与所述无人机飞行前方水平面夹角为锐角,所述无人机的机身水平设置;
在所述无人机飞往预设区域前规划飞行路径,且在所述无人机到达预设区域前采用巡航模式。
优选地,所述无人机的控制系统根据工作任务或远程信号指示调整所述无人机对应的所述工作模式。
优选地,所述工作模式包括恒定俯角飞行模式、目标直线跟踪模式、目标环绕跟踪模式和原地悬停模式,所述原地悬停模式时所述无人机的螺旋桨轴线向上延伸方向与所述无人机飞行后方水平面夹角为锐角。
优选地,所述无人机通过任务载荷设备的安装类型对所挂载的任务载荷进行识别,并将所述任务载荷作为工作任务时工作模式选择的输入条件
优选地,所述无人机通过电器接口对所挂载的任务载荷设备进行识别,所述电器接口包括第一接口和第二接口,所述任务挂载设备包括通过第一接口与所述机身连接的消防水枪和通过所述第二接口与所述机身连接的光电吊舱,所述光电吊舱用于对目标区域进行监控。
优选地,包括机身、前机臂、后机臂、安装在所述前机臂上的前螺旋桨组件及安装在所述后机臂上的后螺旋桨组件,所述前机臂和所述后机臂安装在所述机身上,所述前机臂能够绕所述前机臂轴线方向转动以进行飞行模式的转换。
优选地,所述后机臂与所述机身固定连接,所述后螺旋桨组件的螺旋桨轴线与所述机身轴线垂直,所述前螺旋桨组件为两个,所述后螺旋桨组件为两个;
当所述无人机在巡航模式时满足:
T
T
T
式中,θ为前机臂向前的倾斜角,G为无人机总重,T
优选地,当所述无人机在恒定俯角飞行时满足:
式中,F
优选地,所述前机臂和所述后机臂同方向转动,且转角相同;
所述无人机在巡航模式时满足:
Tcosθ=(G-F
Tsinθ=F
式中T为螺旋桨拉力;
当所述无人机以恒定俯角飞行时,螺旋桨倾斜角及拉力满足:
θ=90°-β
T=F
当所述无人机以追踪固定目标模式飞行时,螺旋桨倾斜角及拉力满足:
θ=90°-β
式中T
优选地,所述前机臂通过第一动作机构绕所述前机臂轴线运动,所述后机臂通过第二动作机构绕所述后机臂轴线运动,
在所述无人机处于巡航模式时,各螺旋桨产生升力满足:
T
T
T
式中T1、T2分别为前后螺旋桨拉力,θ1、θ2分别为前后螺旋桨倾斜角;
当所述无人机恒定俯角飞行时满足:
θ=90°-β
T=F
在所述无人机追踪固定目标模式飞行时满足:
F
F
式中T
在上述技术方案中,本发明提供的无人机控制方法,包括步骤:通过控制系统设置无人机的飞行模式;飞行模式包括巡航模式和工作模式,巡航模式时无人机的螺旋桨轴线向上延伸方向与无人机飞行前方水平面夹角为锐角,无人机的机身水平设置。在无人机飞往预设区域前规划飞行路径,且在无人机到达预设区域前采用巡航模式。
通过上述描述可知,在本申请提供的无人机控制方法中,巡航模式时所述无人机的螺旋桨轴线向上延伸方向与所述无人机飞行前方水平面夹角为锐角,无需主动调节机身倾斜角度,相对于机身倾斜的情况,有效地减小无人机巡航模式时飞时机身产生的阻力。同时,由于无人机飞往预设区域前规划飞行路径,且在所述无人机到达预设区域前采用巡航模式,即在无人机巡航模式时,无需使用者实施调节无人机飞行状态,因此,有效地降低使用者在无人机巡航模式时的劳动强度。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
图1为本发明实施例所提供的无人机的三维结构外观图;
图2为本发明实施例所提供的无人机处于水平巡航状态图;
图3为本发明实施例所提供的无人机处于定俯角平飞状态状态图;
图4为本发明实施例所提供的无人机处于对固定目标跟踪轨迹状态图;
图5为本发明实施例所提供的无人机安装有任务载荷设备的结构图;
图6为本发明实施例所提供的机身的安装位置图;
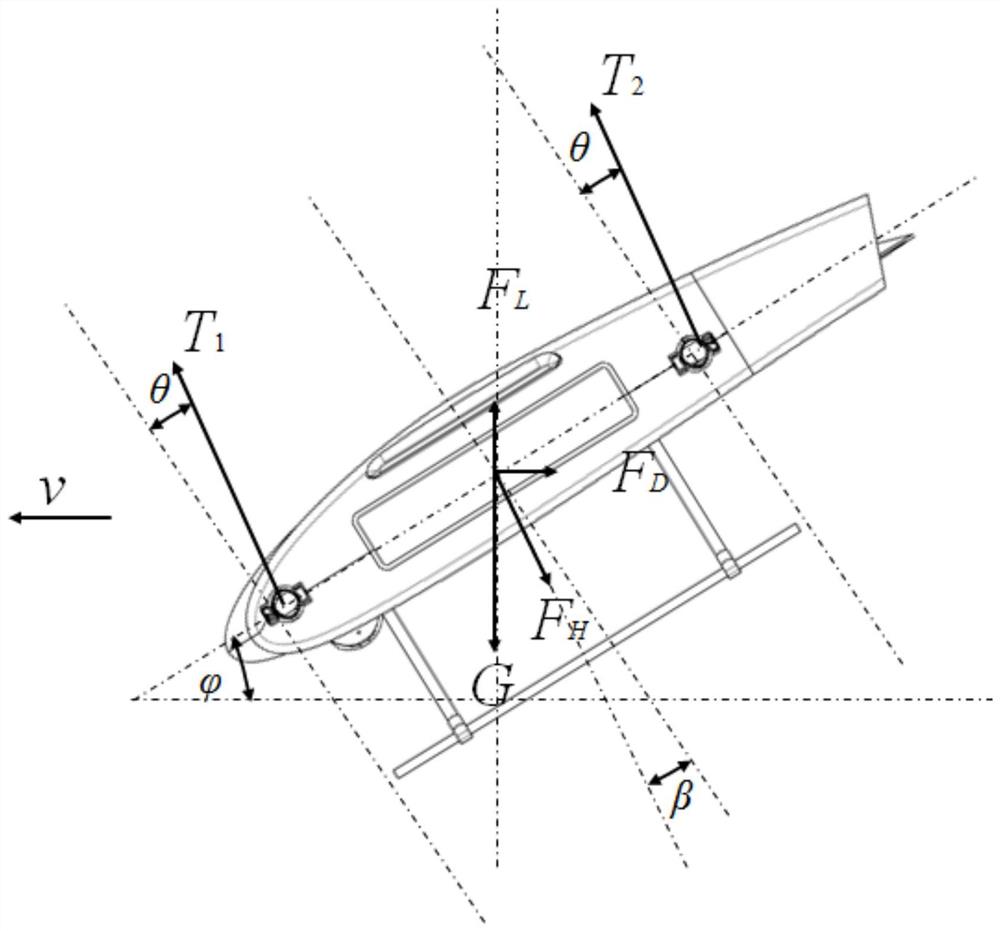
图7为本发明实施例所提供的无人机处于巡航飞行状态受力示意图;
图8为本发明实施例所提供的无人机处于巡查/扫描模式受力;
图9为本发明实施例所提供的无人机中前机臂和后机臂同步转动处于巡航飞行状态示意图;
图10为本发明实施例所提供的无人机中前机臂和后机臂非同步转动处于巡航飞行状态示意图;
图11为实施例所提供的无人机中前机臂和后机臂同步转动处于巡查/扫描模式示意图;
图12为实施例所提供的无人机倾斜悬停示意图。
其中图1-6中:1-机身、2-前机臂、3-前螺旋桨、4-后机臂、5-后螺旋桨、6-前发动机、7-后发动机、8-任务载荷设备。
具体实施方式
本发明的核心是提供一种无人机控制方法,在减小无人机巡航模式时飞时机身产生的阻力的同时,降低使用者在无人机巡航模式时劳动强度。
为了使本领域的技术人员更好地理解本发明的技术方案,下面结合附图和实施方式对本发明作进一步的详细说明。
请参考图1至图12。
在一种具体实施方式中,本发明具体实施例提供的无人机控制方法,包括步骤:
通过控制系统设置无人机的飞行模式。具体的控制系统可以设置在无人机的机身上。
飞行模式包括巡航模式和工作模式,所述巡航模式时所述无人机的螺旋桨轴线向上延伸方向与所述无人机飞行前方水平面夹角为锐角,具体的,此时机身可以水平设置,即与无人机静置于地面相同。
在无人机飞往预设区域前规划飞行路径,且在所述无人机到达预设区域前采用巡航模式。
通过上述描述可知,在本申请具体实施例所提供的无人机控制方法中,巡航模式时所述无人机的螺旋桨轴线向上延伸方向与所述无人机飞行前方水平面夹角为锐角,无需主动调节机身倾斜角度,相对于机身倾斜的情况,有效地减小无人机巡航模式时飞时机身产生的阻力。同时,由于无人机飞往预设区域前规划飞行路径,且在所述无人机到达预设区域前采用巡航模式,即在无人机巡航模式时,无需使用者实施调节无人机飞行状态,因此,有效地降低使用者在无人机巡航模式时的劳动强度。
在一种具体实施方式中,该无人机的控制系统根据飞行模式控制置无人机的飞行姿态;在无人机飞往预设区域行程中,控制系统关闭通讯系统,此时无人机在飞行过程按照预设路径机飞行姿态进行飞行。在无人机到达预设区域后,控制系统打开通讯系统。此时无人机通过通讯系统接收地面设备信号,可以通过接收地面设备信号进行飞行姿态调整。由于在无人机飞往预设区域行程中,通讯系统处于关闭状态,无人机按照预设路径进行飞行,由于通讯系统处于关闭状态,其它设备无法截取无人机发送的信号,进而无法通过获取信号得知无人机位置,因此,该无人机控制方法提高了无人机飞行的安全性。
具体的,无人机包括机身、前机臂、后机臂、安装在前机臂上的前螺旋桨组件及安装在后机臂上的后螺旋桨组件,前机臂和后机臂安装在机身上,前机臂能够绕前机臂轴线方向转动以进行飞行模式的转换。当无人机加速前飞时,螺旋桨前倾角增大,同时前螺旋桨转速增大,以保证竖直方向升力继续与重力平衡;当无人机需要减速或后退时,前机臂向后转动,前螺旋桨向后倾斜,产生水平方向向后的分力,使得无人机减速或后退。
具体的,前螺旋桨组件为两个分别布置在前机臂的左右两端,前螺旋桨组件包括前发动机及安装在前发动机输出端的前螺旋桨。后螺旋桨组件为两个,分别布置在后机臂的左右两端,后螺旋桨组件包括后发动机及安装在后发动机输出端的后螺旋桨。前螺旋桨和后螺旋桨用于提供无人机飞行所需的升力及操控力。
无人机工作时,控制系统根据飞行模式控制置无人机的飞行姿态;通过接收飞行模式状态,无人机控制任务载荷设备进行预设工作。
无人机各螺旋桨产生拉力为
T=k
式中,ρ为大气密度,N为螺旋桨转速,T为无人机螺旋桨产生拉力,k
如图7所示,在一种具体实施方式中,后机臂与机身固定连接,后螺旋桨组件的螺旋桨轴线与机身轴线垂直。
当无人机在巡航飞行时满足,具体的,无人机保持机身处于水平或轻微抬头姿态以降低阻力:
T
T
T
式中,θ为前机臂向前的倾斜角,G为无人机总重,T
如图8所述,当无人机在恒定俯角飞行时满足,由于机身处于负迎角状态,升力方向一般向下,和重力方向相同。
恒定俯角飞行时,飞控系统根据预设俯角
式中,F
前机臂和后机臂通过同方向转动,且转向相同,具体的,无人机前后机臂通过传动机构进行联动,保持相同的转角。
具体的,前机臂和后机臂穿过机身的框架上的安装孔,并能绕自身轴线自由转动,实现前发动机和后发动机的倾斜,从而改变前螺旋桨和后螺旋将拉力方向,实现无人机的矢量控制。
如图9所示,无人机在巡航飞行时满足,此时保持机身处于水平或轻微抬头姿态以降低阻力:
Tcosθ=(G-F
Tsinθ=F
式中T为螺旋桨拉力。该实施例中,飞控系统控制前螺旋桨和后螺旋桨产生相同升力。
如图11所示,当无人机以恒定俯角飞行时,螺旋桨倾斜角及拉力满足:
θ=90°-β
T=F
当无人机以追踪固定目标模式飞行时,螺旋桨倾斜角及拉力满足:
θ=90°-β
式中T
前机臂通过第一动作机构绕前机臂轴线运动,后机臂通过第二动作机构绕后机臂轴线运动。
如图10所示,在无人机巡航飞行时,保持机身处于水平或轻微抬头姿态以降低阻力,各螺旋桨产生升力满足:
T
T
T
式中式中T1、T2分别为前后螺旋桨拉力,θ1、θ2分别为前后螺旋桨倾斜角。在计算具体的T-θ组合时,一般以N
在无人机恒定俯角时满足,此时两螺旋桨倾斜角及拉力一般设置为相同以简化飞控系统计算:
θ=90°-β
T=F
在无人机追踪固定目标模式飞行时满足,前部螺旋桨角度设置为接近铅垂线方向,后部螺旋桨角度设置为较接近垂直机身方向,以提供较大的转向力矩:
F
F
式中T1、T2分别为前后螺旋桨拉力,L为机身重心至前/后机臂的距离,I为无人机绕自身重心的俯仰转动惯量,
在一种具体实施方式中,无人机的控制系统可以根据工作任务或远程信号指示调整无人机对应的所述工作模式。具体的,无人机控制方法还包括与无人机信号连接的地面设备,地面设备为手机或电脑,使用者通过操作地面设备,通过远程信号对无人机的控制系统传输指令。
具体的,无人机还可以通过任务载荷设备的安装类型对所挂载的任务载荷进行识别,并将所述任务载荷作为工作任务时工作模式选择的输入条件。具体的,可以通过电器接口对所挂载的任务载荷设备进行识别,其中每个任务载荷设备均具有与其一一对应的电器接口,且不同任务载荷设备对应的电器接口不同。
机身的气动力中心和无人机重心重合,以降低控制计算难度。
在一种具体实施方式中,工作模式包括恒定俯角飞行模式、目标直线跟踪模式、目标环绕跟踪模式和原地悬停模式,所述原地悬停模式时所述无人机的螺旋桨轴线向上延伸方向与所述无人机飞行后方水平面夹角为锐角。其中目标直线跟踪模式为无人机根据目标位置进行直线飞行跟踪,目标环绕跟踪模式,可以为绕目标外周呈环形飞行。
飞行姿态选择通过操作人员控制或通过无人机的控制系统控制。
当无人机执行类似巡线等任务,例如需要对前方大面积或长条状区域进行持续检测时,或当无人机携带武器,对前方长条形区域进行持续火力打击时,可将机臂前倾,螺旋桨升力轴线指向前上方,使无人机能保持低头姿态持续前飞,实现对前方区域的持续扫描或打击,此时无人机处于恒定俯角飞行模式。
当无人机需要对固定目标进行持续监控或打击时,可将机臂后倾,螺旋桨升力轴线指向无人机的后上方,使无人机能保持低头姿态持续悬停,此时无人机处于原地悬停模式。
无人机可在飞行中持续改变螺旋桨升力轴线相对机身的方向,保证无人机在前飞的同时,机头始终指向地面的固定或移动目标,从而降低悬停对准目标时,自身的燃料消耗以及受到攻击的风险。
优选,机身外形为较简单光顺的形状,能够通过前期经验和仿真计算较为容易的获得机身在不同飞行速度和俯仰角度下的气动力,从而用于对螺旋桨拉力的控制。
任务载荷设备包括观测设备和驱动设备。
无人机起飞前,操作人员通过地面设备(手机、电脑等设备)对任务类型进行选择,并设置目标地点,完成前往目标地点的飞行路径规划。同时,无人机通过电气接口对自身所挂载的任务载荷设备进行识别,判断其安装类型为固定安装(如消防水枪等)或可运动设备(如光电吊舱等),作为工作模式选择的输入条件。
无人机在前往任务地点途中,保持水平巡航模式,机身保持水平姿态,旋翼适当前倾,以降低飞行阻力,提高续航时间。
到达任务区域后,无人机通过其所搭载的观测设备获取目标信息,回传至地面操作平台。由操作人员或无人机自主决策,确定飞行模式,包括水平巡航、定俯角平飞、目标直线跟踪、目标环绕跟踪、原地悬停等。
电器接口包括第一接口和第二接口,所述任务挂载设备包括通过第一接口与所述机身连接消防水枪和通过所述第二接口与所述机身连接的光电吊舱,所述光电吊舱用于对目标区域进行监控。
当无人机挂载光电吊舱及消防水枪执行野外防火任务,无人机通过与消防水枪和光电吊舱的电气接口进行识别,判断光电吊舱为可转动设备,水枪为固定设备。
无人机起飞后,以巡航模式到达目标区域,对预先规划的区域进行火情巡逻。由于光电吊舱为可转动设备,无人机保持水平巡航模式,通过在水平及俯仰方向转动光电吊舱进行对目标区域的监控。
在目标区域检测到明火情况下,无人机操作人员对火情进行观察,确定着火地点、火情强弱、火场面积等信息,进而选择飞行模式。
应对开阔区域、范围较大的火场时,无人机可选择定俯角平飞模式,机身姿态保持一恒定俯角,飞行方向保持水平直线,在飞行中进行水枪喷洒,对火场进行扑灭。
应对点状火源时,无人机可选择原地悬停,机身下俯,对准着火点进行扑灭。也可根据需要,选择目标直线跟踪模式,在飞行中保持对着火点的持续扑灭,以对着火点的多个方向进行喷射提升灭火效果,或利用飞行中的迎风气流对机身进行冷却,避免靠近火场导致机身温度过高。
在本申请具体实施例所提供的无人机控制方法中,控制系统根据飞行模式控制置无人机的飞行姿态,可以通过调整前机臂的转动角度,带动前螺旋桨相对于机身轴线转动,进而调节飞行模式,无需主动调节机身倾斜角度,因此,减小前飞时机身产生的阻力。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
- 无人机、操作器、无人机的控制方法、操作器的控制方法以及无人机控制程序
- 无人机系统、无人机、移动体、无人机系统的控制方法和无人机系统控制程序