一种智能控制可移动式机械手臂
文献发布时间:2023-06-19 11:00:24
技术领域
本发明涉及机械手臂技术领域,尤其涉及一种智能控制可移动式机械手臂。
背景技术
机械手臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影。尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位到三维(或二维)空间上的某一点进行作业,机械手臂根据结构形式的不同分为多关节机械手臂,直角坐标系机械手臂,球坐标系机械手臂,极坐标机械手臂,柱坐标机械手臂等。
传统的机械手臂在长时间使用过程中驱动部分可能会缺少润滑油,使得机械臂的磨损变大,从而降低传动结构的使用寿命,通过人工对驱动部分进行润滑需要耗费大量的人力与时间,降低机械手臂的工作效率,在机械手臂工作的过程中机械爪上可能会附着大量的灰尘与杂质,人工进行清理费时费力,因此需要一种智能控制可移动式机械手臂。
发明内容
本发明的目的是为了解决现有技术中存在的缺点,而提出的一种智能控制可移动式机械手臂。
为了实现上述目的,本发明采用了如下技术方案:
一种智能控制可移动式机械手臂,包括底座、电动升降杆、第一电机、机械爪、第二电机,所述电动升降杆固定安装在底座的外侧壁上,所述电动升降杆的末端固定连接有支撑板,所述支撑板的外侧壁上固定连接有固定箱,所述固定箱的内侧壁上固定安装有润滑箱,所述润滑箱的内侧壁上固定连接有分隔板,所述润滑箱的内侧壁上滑动连接有润滑机构,所述固定箱的外侧壁上固定连接有支撑杆,所述支撑杆的末端固定连接有连接箱,所述连接箱的外侧壁上开设有贯穿槽,所述第二电机固定安装在连接箱的内侧壁上,所述第二电机的输出轴末端固定连接有连接杆,所述连接杆的末端与连接箱的内侧壁转动连接,所述连接杆的外侧壁上固定连接有有主动齿轮,所述连接箱的内侧壁上转动连接有限位杆,所述限位杆的外侧壁上固定连接有从动齿轮,所述限位杆的外侧壁上固定连接有主动杆,所述主动杆贯穿贯穿槽,所述第一电机固定安装在主动杆的内部,所述第一电机的输出轴末端固定连接有固定杆,所述固定杆贯穿主动杆的外侧壁,所述机械爪与固定杆的末端固定连接,所述底座的外侧壁上固定连接有放置盒,所述放置盒的内侧壁上固定连接有多个第一弹簧,所述第一弹簧的末端固定连接有放置板,所述底座的外侧壁上固定连接有清理箱,所述清理箱的内侧壁上滑动连接有挤压机构,所述清理箱的外侧壁上固定连接有清理管,所述清理管的外侧壁上开设有锁定槽,所述锁定槽的内侧壁上滑动连接有清理机构,所述清理机构与清理管的内侧被壁相抵紧。
优选地,所述润滑机构包括滑动连接在润滑箱内侧壁上的挤压板,所述挤压板的外侧壁上固定连接有拉绳,所述拉绳依次贯穿润滑箱、固定箱和支撑板的外侧壁,所述拉绳的末端与底座的外侧壁固定连接,所述润滑箱的外侧壁上固定连接有润滑管,所述润滑管的末端贯穿连接箱的外侧壁。
优选地,所述挤压机构包括滑动连接在清理箱内侧壁上的活塞板,所述活塞板的外侧壁上固定连接有挤压杆,所述挤压杆的末端贯穿清理箱的外侧壁,所述挤压杆的末端与支撑板的外侧壁固定连接。
优选地,所述清理机构包括滑动连接在锁定槽内侧壁上的闭合板,所述闭合板的外侧壁上固定连接有第二弹簧,所述第二弹簧的末端与清理管的外侧壁固定连接,所述闭合板的外侧壁上固定连接有细绳,所述细绳的末端与放置板的外侧壁固定连接,所述闭合板的末端与清理管的内侧壁相抵紧。
优选地,所述从动齿轮的直径远大于主动齿轮的直径,所述从动齿轮与主动齿轮相啮合。
优选地,所述第二弹簧与闭合板的外侧壁相绕设,所述第二弹簧的材质为奥氏体不锈钢。
优选地,所述清理管的末端上设有喷嘴。
优选地,所述第一弹簧的材质为弹簧钢,所述放置板的材质为橡胶。
相比现有技术,本发明的有益效果为:
1、通过启动电动升降杆,电动升降杆在运动的过程中带动支撑板向上运动,支撑板带动润滑箱向上移动,使得拉绳拉动挤压板向下运动,挤压板对润滑箱内部的润滑油进行挤压,润滑油会通过润滑管排出到连接箱的内部,从而对连接箱内部主动齿轮与从动齿轮组成的传动机构进行润滑,从而在机械臂每次使用的过程中自动对连接箱内部的传动机构进行润,减小传动机构之间的磨损,增加了传动机构的使用寿命,并且不需要人工进行润滑,大大降低人工润滑所耗费的时间与人力,从动齿轮的半径大于主动齿轮的半径,可以降低第二电机在驱动过程中所需要的扭矩。
2、当机械臂工作结束后,需要对机械臂进行放置,避免机械臂长时间悬空导致内部的连接部分发生损坏,通过启动第二电机,第二电机使得限位杆开始转动,限位杆带动主动杆开始转动,再启动电动升降杆,电动升降杆带动机械臂向下移动,机械臂在向下移动的过程使得机械爪中与放置板的表面相抵紧,继续向下运动对第一弹簧进行压缩,避免机械爪直接放置导致传动部分发生崩坏,支撑板在向下移动的过程中带动挤压杆向下移动,挤压杆带动活塞板向下移动,活塞板向下移动会对清理箱内部的空气进行压缩,并且机械爪会使得放置板向下移动,放置板拉动细绳向下移动,从而实现对清理管的开启,将清理箱内部压缩的气体通过清理管喷向机械爪的表面,对机械爪表面上的灰尘以及杂质进行清理,不需要人工进行清理,节省大量的人力与时间。
附图说明
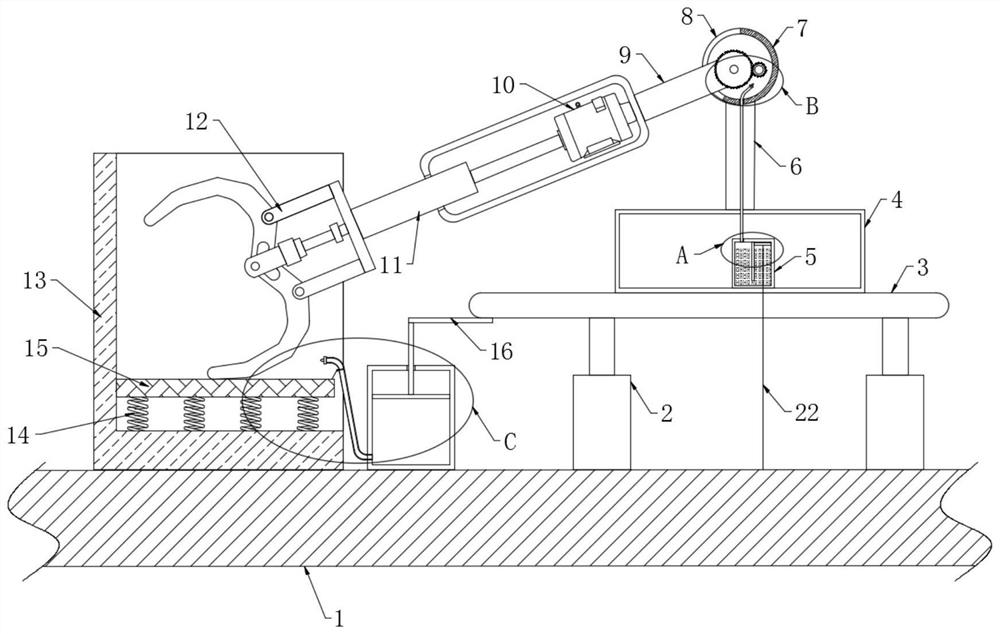
图1为本发明提出的一种智能控制可移动式机械手臂的结构示意图;
图2为本发明的A部分放大图;
图3为本发明的B部分放大图;
图4为本发明的C部分放大图;
图5为本发明的D部分放大图;
图6为本发明连接箱的俯视图。
图中:1底座、2电动升降杆、3支撑板、4固定箱、5润滑箱、6支撑杆、7连接箱、8贯穿槽、9主动杆、10第一电机、11固定杆、12机械爪、13放置盒、14第一弹簧、15放置板、16挤压杆、17第二电机、18连接杆、19限位杆、20主动齿轮、21从动齿轮、22拉绳、23分隔板、24挤压板、25润滑管、26清理箱、27活塞板、28清理管、29锁定槽、30闭合板、31第二弹簧、32细绳。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
参照图1-6,一种智能控制可移动式机械手臂,包括底座1、电动升降杆2、第一电机10、机械爪12、第二电机17,电动升降杆2固定安装在底座1的外侧壁上,电动升降杆2的末端固定连接有支撑板3,支撑板3的外侧壁上固定连接有固定箱4;
固定箱4的内侧壁上固定安装有润滑箱5,润滑箱5的内侧壁上固定连接有分隔板23,润滑箱5的内侧壁上滑动连接有润滑机构,润滑机构包括滑动连接在润滑箱5内侧壁上的挤压板24,挤压板24的外侧壁上固定连接有拉绳22,拉绳22依次贯穿润滑箱5、固定箱4和支撑板3的外侧壁,拉绳22的末端与底座1的外侧壁固定连接,润滑箱5的外侧壁上固定连接有润滑管25,润滑管25的末端贯穿连接箱7的外侧壁,润滑机构能够对主动齿轮20与从动齿轮21进行润滑,减小主动齿轮20与从动齿轮21之间的摩擦损耗,从而增加主动齿轮20与从动齿轮21的使用寿命;
固定箱4的外侧壁上固定连接有支撑杆6,支撑杆6的末端固定连接有连接箱7,连接箱7的外侧壁上开设有贯穿槽8,第二电机17固定安装在连接箱7的内侧壁上,第二电机17的输出轴末端固定连接有连接杆18,连接杆18的末端与连接箱7的内侧壁转动连接,连接杆18的外侧壁上固定连接有有主动齿轮20,连接箱7的内侧壁上转动连接有限位杆19,限位杆19的外侧壁上固定连接有从动齿轮21,从动齿轮21的直径远大于主动齿轮20的直径,从动齿轮21与主动齿轮20相啮合,从而能够减小第二电机17转动所需要的扭矩,限位杆19的外侧壁上固定连接有主动杆9,主动杆9贯穿贯穿槽8,第一电机10固定安装在主动杆9的内部,第一电机10的输出轴末端固定连接有固定杆11,固定杆11贯穿主动杆9的外侧壁,机械爪12与固定杆11的末端固定连接,底座1的外侧壁上固定连接有放置盒13,放置盒13的内侧壁上固定连接有多个第一弹簧14,第一弹簧14的末端固定连接有放置板15,第一弹簧14的材质为弹簧钢,弹簧钢具有高抗拉强度、弹性极限、疲劳强度以及良好的伸缩性,从而在受到外力时通过收缩起到减震作用,放置板15的材质为橡胶;
底座1的外侧壁上固定连接有清理箱26,清理箱26的内侧壁上滑动连接有挤压机构,挤压机构包括滑动连接在清理箱26内侧壁上的活塞板27,活塞板27的外侧壁上固定连接有挤压杆16,挤压杆16的末端贯穿清理箱26的外侧壁,挤压杆16的末端与支撑板3的外侧壁固定连接,通过挤压机构能够对清理箱26内部的气体进行压缩;
清理箱26的外侧壁上固定连接有清理管28,清理管28的末端上设有喷嘴,清理管28的外侧壁上开设有锁定槽29,锁定槽29的内侧壁上滑动连接有清理机构,清理机构与清理管28的内侧被壁相抵紧,清理机构包括滑动连接在锁定槽29内侧壁上的闭合板30,闭合板30的外侧壁上固定连接有第二弹簧31,第二弹簧31的末端与清理管28的外侧壁固定连接,第二弹簧31与闭合板30的外侧壁相绕设,第二弹簧31的材质为奥氏体不锈钢,奥氏体不锈钢结构稳定,不易生锈能够长时间使用需要进行更换,闭合板30的外侧壁上固定连接有细绳32,细绳32的末端与放置板15的外侧壁固定连接,闭合板30的末端与清理管28的内侧壁相抵紧;通过清理机构能够对机械爪12表面上的灰尘以及杂质进行清理,不需要人工进行清理,节省大量的人力与时间。
机械臂在移动的过程中通过超声传感器、激光传感器以及视觉传感器能够对障碍物到机器之间的距离和形状进行判断,在基于智能优化算法的运动规划模块来实现对机械臂以及移动平台的控制,进而实现对移动姿态及位置的调整,根据ROS系统架构,在移动机器人工控机上搭建ROS系统平台、构建无线网络连接、传感器信息采集、信号分析处理、人机交互等机器人系统模块,实现机器人的SLAM功能和导航功能;通过设计视觉跟随定位算法,使其在ROS下实现抓取目标的识别和目标定位;根据机械臂手腕部力传感器反馈信息,利用位置力混合算法、模糊自适应等算法调整夹持器移动轨迹和夹持力度。
本发明中,使用时,先启动电动升降杆2,电动升降杆2带动支撑板3向下移动,支撑板3带动固定箱4向上移动,支撑板3向上移动通过拉绳22带动挤压板24向下移动,挤压板24向下移动对润滑箱5内部的润滑油进行挤压,润滑箱5内部的润滑油通过润滑管25排出到连接箱7的内部,从而对主动齿轮20与从动齿轮21进行润滑,减小主动齿轮20与从动齿轮21之间的摩擦损耗,从而增加主动齿轮20与从动齿轮21的使用寿命;
启动第二电机17,第二电机17带动连接杆18开始转动,连接杆18带动主动齿轮20开始转动,主动齿轮20与从动齿轮21相啮合,从而使得限位杆19开始转动,并且从动齿轮21的半径大于主动齿轮20的半径,从而能够减小第二电机17转动所需要的扭矩,限位杆19带动主动杆9开始转动,对机械臂的角度进行调节,启动第一电机10,第一电机10带动固定杆11开始转动,从而对机械爪的角度进行调节,再通过机械爪12对货物进行固定,就可以实现对货物的搬运,当机械臂工作结束后,启动第二电机17,第二电机17使得限位杆19开始转动,限位杆19带动主动杆9逆时针转动,再启动电动升降杆2,电动升降杆2带动支撑板3向下移动,支撑板3带动机械臂向下移动,机械臂向下移动的过程中与放置板15的外侧壁相抵紧,从而实现对机械臂的支撑作用,避免机械臂长期处于悬空状态,使得主动齿轮20与从动齿轮21组成的传动装置发生损坏,在支撑板3向下移动的过程中地洞挤压杆16向下移动,挤压杆16带动活塞板27向下移动,活塞板27向下移动会对清理箱26内部的空气进行压缩,且机械爪12会使得放置板15向下移动压缩第一弹簧14,放置板15拉动细绳32向下移动,从而实现对清理管28的开启,清理箱26内部压缩的气体通过清理管28喷向机械爪12的表面,对机械爪12表面上的灰尘以及杂志进行清理,不需要人工进行清理,节省大量的人力与时间,;
在机械臂开始工作时候实现对从动齿轮21与主动齿轮20组成的传动装置的润滑,在机械臂停止工作时候在对机械臂进行支撑的同时实现对机械爪12上灰尘杂质的清楚,不需要人工进行清理,更加快捷方便。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种智能控制可移动式机械手臂
- 一种高稳定性可移动式机械手臂