手机摄像头排线点胶设备
文献发布时间:2023-06-19 11:00:24
技术领域
本发明涉及点胶设备,具体涉及一种手机摄像头排线点胶设备。
背景技术
手机摄像头,是安装在手机上用于拍摄静态图片或短片的手机自带配件,手机摄像头一般由镜头(LENS)、音圈马达(VCM)、滤光片(IR)、传感器、PCB板和排线组成,因此摄像头排线是手机摄像头不可或缺的一部分,目前摄像头排线点胶工序还无法实现完全自动化操作,不仅点胶效率低而且点胶的废品率很高,造成了极大的浪费。
发明内容
为了克服上述缺陷,本发明提供一种手机摄像头排线点胶设备,该点胶设备能够对手机摄像头排线进行全自动化的点胶操作,实现了点胶的自动化、高速化、数据化,在节约人力成本的同时,提高了生产效率和产品的品质。
本发明为了解决其技术问题所采用的技术方案是:
一种手机摄像头排线点胶设备,包括机架,所述机架上设有工作台,所述工作台上固定设有Y轴驱动机构、输送机构、定位机构和清胶机构,所述Y轴驱动机构上设有X轴驱动机构,所述X轴驱动机构上设有Z轴驱动机构,所述Z轴驱动机构上设有两组点胶机构,所述Z轴驱动机构能够驱动点胶机构进行上下运动,所述X轴驱动机构能够驱动Z轴驱动机构和点胶机构一起沿工作台进行左右运动,所述Y轴驱动机构能够驱动X轴驱动机构、Z轴驱动机构和点胶机构一起沿工作台进行前后运动,所述X轴驱动机构上设有CCD组件,所述输送机构用于输送装载手机摄像头排线的产品载具至预设位置,所述定位机构用于将到达预设位置的产品载具固定,所述点胶机构用于对定位的手机摄像头排线进行点胶,所述清胶机构用于对点胶机构进行清理,所述清胶机构上设有称重机构,所述称重机构用于对点胶机构的点胶量进行校准。
优选地,所述Y轴驱动机构包括第二支架和第二直线模组,所述第二支架由两个平行的固定架构成,所述固定架固定于所述工作台上,所述第二直线模组固定于所述第二支架上,所述X轴驱动机构连接于第二直线电机模组且该第二直线模组能够驱动X轴驱动机构沿着第二支架进行前后运动。
优选地,所述X轴驱动机构包括第一支架、支撑板和第一直线模组,所述第一支架的两端分别滑动地连接于所述固定架上,所述第一直线模组固定于所述第一支架,所述支撑板连接于所述第一直线模具,所述Z轴驱动机构和CCD组件固定于所述支撑板,所述第一直线模组能够驱动所述支撑板沿着第一支架进行左右运动。
优选地,所述Z轴驱动机构包括第三支架和第三直线模组,所述第三直线模组固定于所述支撑板且连接所述第三支架,所述第三支架竖直地布置于所述支撑板上,所述点胶机构固定于所述第三支架上,所述第三直线模组能够驱动所述点胶机构进行上下运动。
优选地,所述点胶机构包括点胶阀、点胶头和胶筒,所述胶筒用于储存胶料,所述点胶阀用于精确控制点胶头的流量。
优选地,所述输送机构沿工作台的长度方向布置,该输送机构包括框架、设于框架上的输送带以及驱动该传输带的动力单元。
优选地,所述定位机构包括顶升电机、定位板和阻挡气缸,所述定位板上设有多个定位针,所述顶升电机连接于定位板并能够驱动定位板进行上下运动,所述产品载具上设有与定位针匹配的定位孔,当产品载具被输送至定位机构的正上方时,所述顶升电机驱动定位板上行使定位针插入产品载具的定位孔中,所述阻挡气缸用于从产品载具的一端抵挡住产品载具。
优选地,所述清胶机构包括擦胶单元、吸胶单元和残胶收集杯,所述残胶收集杯用于收集点胶机构的残胶,所述擦胶单元用于擦除点胶机构表面的胶体,所述吸胶单元用于吸出点胶机构内的残胶。
本发明的有益效果是:本发明主要包括X轴驱动机构、Y轴驱动机构、Z轴驱动机构、CCD组件、点胶机构、输送机构。定位机构、清胶机构和称重机构,所述X轴驱动机构、Y轴驱动机构和Z轴驱动机构用于调节点胶机构的三轴方向的位置,所述CCD组件用于精确手机摄像头排线的点胶位置,所述输送机构用于手机摄像头排线的输送,所述定位机构用于手机摄像头排的定位以便于点胶机构对其进行点胶,操作过程中通过高精密传感器辅助测量点胶时的高度、通过CCD组件飞拍点胶位置、并通过点胶阀来精确控制点胶量,从而实现对航空雷达壳进行自动化的、高精度、高效率的点胶操作,并通过清胶机构来对点胶机构进行及时的清理,以保证点胶的质量并延长了点胶机构的使用寿命;利用称重机构精确控制手机摄像头排线上的点胶量,本点胶设备中设有两组点胶机构,即采用双点胶阀,采用微量高精度的双点胶阀能够达到如下效果:单点胶量能够控制在0.005mg,且点胶区域只有0.5mm
附图说明
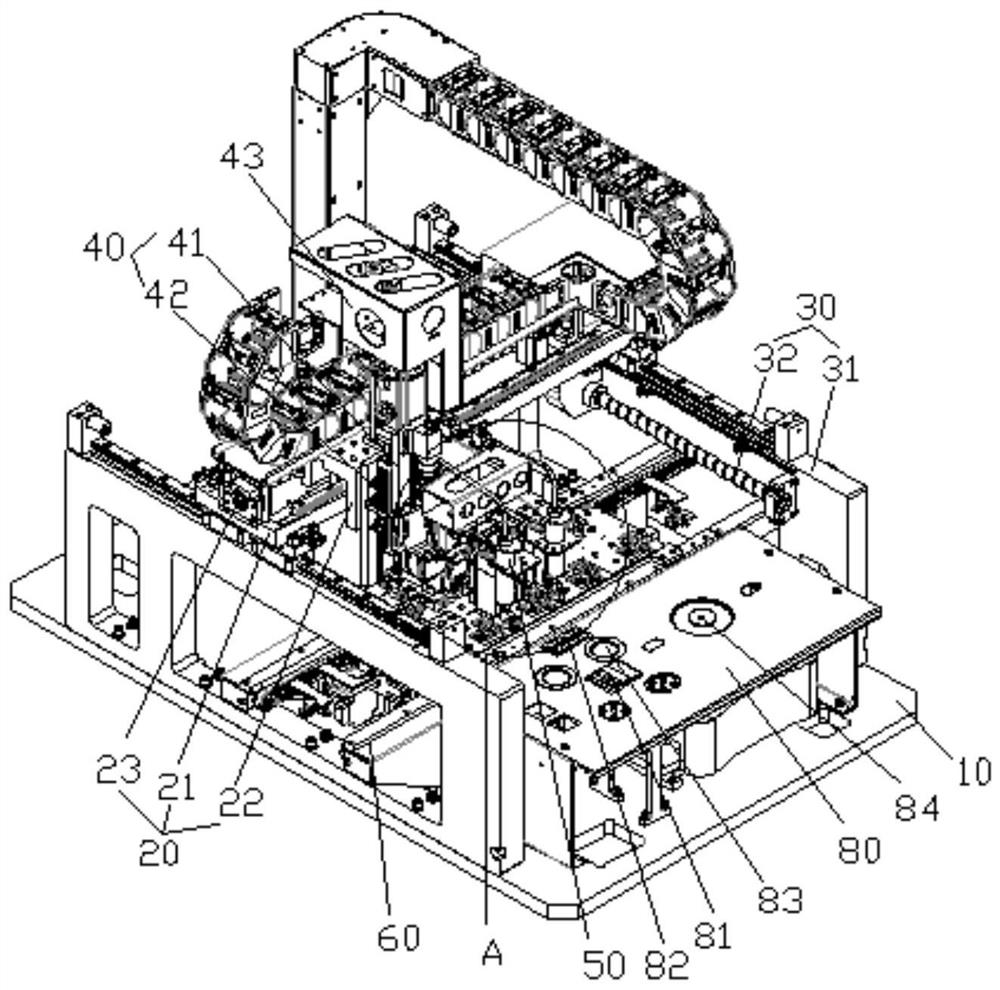
图1为本发明的结构示意图;
图2为图1中A-A处的放大图;
图3为本发明中输送机构的结构示意图;
图4为本发明中输送机构的俯视图;
图5为本发明中输送机构的侧视图;
图中:10-工作台,20-X轴驱动机构,21-第一支架,22-支撑板,23-第一直线模组,30-Y轴驱动机构,31-第二支架,32-第二直线模组,40-Z轴驱动机构,41-第三支架,42-第三直线模组,43-CCD组件,50-点胶机构,51-点胶阀,52-点胶头,53-胶筒,60-输送机构,61-输送带,62-动力单元,63-框架,70-定位机构,71-顶升电机,72-定位板,73-定位针,74-阻挡气缸,80-清胶机构,81-擦胶单元,82-吸胶单元,83-残胶收集杯,84-称重机构。
具体实施方式
下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
需要说明的是,本申请的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以使这里描述的本申请的实施方式例如能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
为了便于描述,在这里可以使用空间相对术语,如“在……之上”、“在……上方”、“在……上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其他器件或构造之下”。因而,示例性术语“在……上方”可以包括“在……上方”和“在……下方”两种方位。该器件也可以其他不同方式定位(旋转90度或处于其他方位),并且对这里所使用的空间相对描述作出相应解释。
实施例:如图1-5所示,一种手机摄像头排线点胶设备,包括机架,所述机架上设有工作台10,所述工作台10上固定设有Y轴驱动机构30、输送机构60、定位机构70和清胶机构80,所述Y轴驱动机构30上设有X轴驱动机构20,所述X轴驱动机构30上设有Z轴驱动机构40,所述Z轴驱动机构40上设有两组点胶机构50,所述Z轴驱动机构40能够驱动点胶机构50进行上下运动,所述X轴驱动机构20能够驱动Z轴驱动机构40和点胶机构50一起沿工作台进行左右运动,所述Y轴驱动机构30能够驱动X轴驱动机构、Z轴驱动机构和点胶机构50一起沿工作台进行前后运动,所述X轴驱动机构20上设有CCD组件43,所述输送机构60用于输送装载手机摄像头排线的产品载具至预设位置,所述定位机构70用于将到达预设位置的产品载具固定,所述点胶机构50用于对定位的手机摄像头排线进行点胶,所述清胶机构80用于对点胶机构50进行清理,所述清胶机构80上设有称重机构84,所述称重机构84用于对点胶机构50的点胶量进行校准。本点胶设备用于对手机摄像头排线进行点胶,手机摄像头排线固定于产品载具上,产品载具通过输送机构60输送至预设位置后,定位机构70上行装载手机摄像头排线的产品载具固定,点胶机构50通过X轴驱动机构20控制其左右方向的位置、通过Y轴驱动机构30控制其前后方向的位置以及通过Z轴驱动机构40控制其上下方向的位置,以此来准确地对手机摄像头排线进行点胶,操作过程中通过高精密传感器辅助测量点胶时的高度、通过CCD组件飞拍点胶位置、并通过点胶阀来精确控制点胶量,从而实现对手机摄像头排线进行自动化、高精度、高效率的点胶操作,并通过清胶机构来对点胶机构进行及时的清理,以保证点胶的质量并延长了点胶机构的使用寿命;点胶前,通过称重机构84来校准点胶机构的点胶量,所述称重机构84为精密天平,具体过程为:称取一定时间内从点胶机构中流出的胶量,计算点胶机构的胶体流速,从而精确控制手机摄像头排线上的点胶量,本点胶设备中设有两组点胶机构,即采用双点胶阀,采用微量高精度的双点胶阀能够达到如下效果:单点胶量能够控制在0.005mg,且点胶区域只有0.5mm
所述Y轴驱动机构30包括第二支架31和第二直线模组32,所述第二支架31由两个平行的固定架构成,所述固定架固定于所述工作台10上,所述第二直线模组32固定于所述第二支架31上,所述X轴驱动机构20连接于第二直线电机模组32且该第二直线模组32能够驱动X轴驱动机构20沿着第二支架31进行前后运动。所述工作台10呈长方形,所述输送机构60沿着工作台的长度方向布置,将工作台的长度定义为工作台的左右方向即X轴方向,两个固定架沿着工作台的宽度方向布置,将工作台的宽度方向定义为工作台的前后方向即Y轴方向,所述第二支架31的上表面设有滑轨,所述X轴驱动机构20沿着第二支架上的滑轨进行直线运动,所述清胶机构80位于输送机构前方的工作台上,两个固定架分别位于工作台的左右两端且位于输送机构60的上方,具体为:固定架由两个竖杆和一个横杆组成,两个竖杆平行布置且其下端固定连接于工作台,横杆的两端分别固定连接于两个竖杆的上端。
所述X轴驱动机构20包括第一支架21、支撑板22和第一直线模组23,所述第一支架21的两端分别滑动地连接于所述固定架上,所述第一直线模组23固定于所述第一支架21,所述支撑板22连接于所述第一直线模具23,所述Z轴驱动机构40和CCD组件43固定于所述支撑板22,所述第一直线模组23能够驱动所述支撑板22沿着第一支架21进行左右运动。所述第一支架21沿工作台10的长度方向布置,其两端分别滑动连接于第二支架的固定架上,因此在第二直线模组的驱动下第一支架21能够在固定架上进行前后方向的滑动,以调整点胶机构50在Y轴方向的位置;所述第一支架21的上表面设有滑轨,所述支撑板22沿着第一支架的滑轨进行左右滑动。
所述Z轴驱动机构40包括第三支架41和第三直线模组42,所述第三直线模组42固定于所述支撑板22且连接所述第三支架41,所述第三支架41竖直地布置于所述支撑板22上,所述点胶机构50固定于所述第三支架41上,所述第三直线模组42能够驱动所述点胶机构50进行上下运动。所述第三支架与支撑板垂直布置,因此在第三直线模组42的带动下第三支架41能够沿着支撑板22进行上下运动,以调整点胶机构50在Z轴方向的位置;所述第一直线模组、第二直线模组和第三直线模组为丝杆伺服电机。
如图2所示,所述点胶机构50包括点胶阀51、点胶头52和胶筒53,所述胶筒53用于储存胶料,所述点胶阀51用于精确控制点胶头52的流量。
如图3-5所示,所述输送机构60沿工作台10的长度方向布置,该输送机构60包括框架63、设于框架上的输送带61以及驱动该传输带的动力单元62。所述动力单元62包括电机和从动轴,电机中的主动轴与从动轴通过输送带连接,输送带61套设于从动轴上,电机转动带动输送带输送。所述定位机构70包括顶升电机71、定位板72和阻挡气缸74,所述定位板72上设有多个定位针73,所述顶升电机71连接于定位板72并能够驱动定位板72进行上下运动,所述产品载具上设有与定位针73匹配的定位孔,当产品载具被输送至定位机构的正上方时,所述顶升电机71驱动定位板72上行使定位针73插入产品载具的定位孔中,所述阻挡气缸74用于从产品载具的一端抵挡住产品载具。利用阻挡气缸74和定位板72的共同作用来提高产品载具的稳定性,以减少产品的点胶误差,确保产品的点胶精度。
如图1所示,所述清胶机构80包括擦胶单元81、吸胶单元82和残胶收集杯83,所述残胶收集杯83用于收集点胶机构50的残胶,所述擦胶单元81用于擦除点胶机构50表面的胶体,所述吸胶单元82用于吸出点胶机构50内的残胶。具体为:所述擦胶单元81包括夹爪气缸,夹爪气缸的两个夹爪上分别固定一夹板,所述夹板上固定擦胶海绵用于擦除胶体,所述吸胶单元82包括内杯,所述内杯上设有吸胶口供点胶头插入,内杯下端设有吸气口,该吸气口通过真空电磁阀连接抽真空装置,点胶前,将点胶头放于残胶收集杯的杯口,使点胶头内多余的胶体落入残胶收集杯,将点胶头移至擦胶单元81,夹爪气缸自动开合,利用海绵擦掉点胶头上的残胶,以此来模拟人手的擦拭动作,当需要清除点胶头内的胶体时,将点胶头插入内杯的吸胶口,并利用抽真空装置将点胶头内的残胶吸出,因此本清胶机构能够自动对点胶头的表面或内部的残胶进行清理,保证了点胶质量,延长了点胶机构的使用寿命。
本发明的操作过程:步骤如下:
步骤一:将装载手机摄像头排线的产品载具通过输送机构60传输至预设位置后,顶升电机71驱动定位板上行,使定位板72上的定位针73插入产品载具的定位孔,并利用阻挡气缸74将产品载具定位,扫描枪扫描产品载具的条形码;
步骤二:点胶前,利用称重机构84校准点胶阀51的点胶速度,通过擦胶单元81将点胶头52上的残胶擦除,根据CCD组件43确定的点胶位置,X轴驱动机构20、Y轴驱动机构30和Z轴驱动机构40精确调节点胶机构50的位置,点胶阀51精确控制点胶量,完成对手机摄像头排线的点胶操作;
步骤三:手机摄像头排线点胶完成后,CCD组件对其进行复检,顶升电机71驱动定位板72下行,阻挡气缸74放开产品载具,产品载具重新落入输送带61上,被输送机构60输送至下一工序;
步骤四:当整个点胶工序完成后,X轴驱动机构20、Y轴驱动机构30和Z轴驱动机构40驱动点胶机构50运行至清胶机构80,将点胶头内多余的胶体排入残胶收集杯83,再将点胶头52放于内杯的吸胶口,并利用抽真空装置将点胶头内的残胶吸出,最后将点胶头52擦胶单元81,夹爪气缸自动开合,利用海绵擦掉点胶头上的残胶,以此来模拟人手的擦拭动作,从而完成点胶机构的清胶操作。
应当指出,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
- 手机摄像头排线点胶设备
- 一种手机摄像头支架点胶工艺及点胶治具